Abstract
In this study, the reliability of drag embedment anchors in the sand was assessed and the effect of anchor geometrical idealization on reliability indices was investigated as an inherited characteristic of analytical approaches. The anchor holding capacity was obtained by performing a series of iterative limit state analyses and a probabilistic model was developed for the selected anchor families. The tensions of the mooring lines connected to a semisubmersible platform were obtained by performing a series of time-domain dynamic mooring analyses using the OrcaFlex software. The uncertainties in environmental loads, metocean variables, and stress distribution along the catenary mooring lines were incorporated into the line tensions through the response surfaces. An iterative procedure was performed by adopting the first-order reliability method (FORM) to calculate the comparative failure probabilities in sand and clay. The study showed significant dependence of the anchoring system reliability on geometrical configuration of anchors, the seabed soil properties, and the environmental loads. It was observed that the implementation of the reliability-based design into the existing in-filed trial procedures could significantly improve the efficiency and cost-effectiveness of the design practice.
Similar content being viewed by others

Introduction
Drag embedment anchors are widely used as a cost-effective solution for temporary and permeant station keeping of floating structures. By growing offshore exploration and productions, the number of incidents in floating facilities induced by the failure of mooring system has been increased, subsequently (Wang et al., 2010; Ma et al., 2013). This has caused the industry to further emphasize on reliability assessment of the mooring systems and their key components in various types of seabed sediments. Drag embedment anchors are amongst the crucial components of the mooring systems that are used with catenary and taut leg mooring systems.
Different anchoring solutions might be used to provide an efficient and reliable mooring system such as suction anchors, propellant embedded anchors, screw-in anchors, plate anchors, deadweight anchors, pile anchors, and drag embedment anchors. However, the latter one is one of the most attractive options that are simple and cheap to install but challenging to evaluate the holding capacity (Neubecker and Randolph, 1996a; Aubeny and Chi, 2010) due to complex and uncertain interaction with the seabed. (see Fig. 1).

Configuration of drag embedment anchor and the catenary mooring system
There are several studies in the literature that have considered the reliability assessment of various anchor families such as suction anchors (Choi, 2007; Valle-molina et al., 2008; Clukey et al., 2013; Silva-González et al., 2013; Montes-Iturrizaga and Heredia-Zavoni, 2016; Rendón-Conde and Heredia-Zavoni, 2016). The high level of certainties in the evaluation of the holding capacity of suction anchors and the promising results obtained in aforementioned reliability studies has provided confidence about no need for field trials in assessment of holding capacities of these anchors. However, the situation is totally different in drag embedment anchors. Difficulties in collecting in-field holding capacity databases, the complicated interaction between the anchor and the seabed, the unknown ultimate depth and location of the anchor, and the need for the extensive amount of costly computational analyses have resulted in limitations to assess the reliability of these important anchor families. Therefore, the current design practice includes performing costly filed trials (e.g., API RP 2SK, 2008). Moharrami and Shiri (2018) published the first study on the reliability of drag embedment anchors and initiated a reliability assessment approach that could potentially result in elimination or mitigation of the filed trial expenses in future. However, the study was limited to clay and used plastic yield loci to be obtained from a series of time-consuming finite element analyses to characterize the fluke-soil interaction and failure states. Also, the authors did not investigate the impact of anchor geometrical idealization of the reliability indices, which is an inherited consequence of the numerical and analytical approaches.
In this study, the reliability of the drag embedment anchors was assessed in sand that has not been investigated in the past. A limit state approach, with no need to time-consuming finite element analysis was adopted to characterize the anchor failure state. The influence of using idealized anchor geometry on reliability indices was also examined and comparative studies were conducted between the sand and clay to obtain the effect of different uncertainties in shear strength parameters on reliability indices.
The holding capacity of anchors was calculated by developing an Excel spreadsheet and incorporation of the limit state analysis proposed by Neubecker and Randolph (1996a). There are several studies on the prediction of drag anchors capacity by analytical and empirical solutions (Neubecker and Randolph, 1996a; Thorne, 2002; O’Neill et al., 2003; Aubeny and Chi, 2010). However, the adopted solution (Neubecker and Randolph, 1996a) benefits from several advantages such as simplified prediction of the anchor capacity and trajectory, incorporation of chain-sand interaction, and comprehensive validation against the experimental studies (Neubecker and Randolph, 1996a; Neubecker and Randolph, 1996b; O’Neill et al., 1997). This model has been widely used in several studies in the literature (Neubecker and Randolph, 1996b; Neubecker and Randolph, 1996c; O’Neill et al., 2003) and recommended by design codes (e.g., API RP 2SK, 2008). The mooring line tensions were obtained by performing dynamic mooring analysis using OrcaFelx software and a generic semisubmersible platform. Reliability assessment was performed by using the first-order reliability method (FORM) through developing a probability model for anchor holding capacities.
The study further prepared the ground for improvement of the anchor design codes (e.g., API RP 2SK, 2008), where the effect of different reliability indices on proposing an optimized filed trials is currently neglected, and an identical holding capacity evaluation procedure is recommended in both sand and clay.
Methodology
The reliability analysis was conducted by calculation of the anchor capacity against the mooring line tensions. The model proposed by Neubecker and Randolph (1996a) was used to analyze chain-soil and anchor-soil interactions in the sand and predict the anchor capacity at the mudline and shank pad-eye. The anchor model was programmed in an Excel spreadsheet macro using Visual Basic Application (VBA) (see Appendix 1 (Table 17)). OrcaFlex software package was employed to model a generic semisubmersible platform in the Caspian Sea to obtain the characteristic mean and maximum dynamic line tensions for a 100 years return period sea states. Various key parameters were incorporated in the estimation of anchor capacities including peak friction at the seabed, dilation angle, soil density, fluke and shank bearing capacity factors, anchor geometrical configurations, line tension angle at mudline, and side friction factor. The response surfaces were used to determine the mean and expected maximum dynamic line tensions. First-order reliability method (FORM) was used to assess the reliability of anchors connected to the catenary mooring line. The DNV design code (DNV-RP-E301, 2012) was used to define the partial design factors on the mean and maximum dynamic line tensions and capacities.
Anchor-seabed interaction
The anchor system mobilizing the ultimate holding capacity comprises of the anchor and the connected chain, both of which were modeled in this study. The Stevpris MK5 and MK6 anchors were used, as the most popular choices in the industry.
Frictional capacity of chain
The frictional capacity between the chain and the soil can significantly contribute to the ultimate anchor capacity. Also, the angle between the anchor and the chain at the pad eye has an important effect on the soil-chain interaction. In the present study, a stud chain with a free body diagram of its differential segment shown in Fig. 2 was considered, and the methodology proposed by Neubecker and Randolph (1995) was adopted to implement the frictional chain capacity.

Force equilibrium of chain element
The parameter T is the line tension; θ is the inclination from the horizontal; F is the friction force, and Q is the typical soil reaction on the chain segment.
According to Fig. 2, the tangential and normal equilibriums can be written as:
It is possible to describe the normal (Q) and tangential (F) soil resistances acting on the chain as soil pressures:
where d is the nominal chain diameter, En and Et are circumference parameters. In non-cohesive soils, the bearing pressure q can be expressed by:
where q is bearing pressure;Nq is the standard bearing capacity factor; γ′ is the effective unit weight of the soil; z is depth. These governing equilibrium equations are non-linear, which makes difficulties in finding the solution. Therefore, to simplify the equation, the chain was assumed to be weightless. Although, it is possible to account for the chain weight by a secondary effect, i.e., reducing the profile of normal resistance per unit length by an amount equal to the chain weight per unit length. However, Neubecker and Randolph (1995) showed that the contribution of the chain weight has a minor effect on ultimate capacity. The governing equilibrium equations for weightless chain now become:
where the relations ship between F and Q can be written as:
where μ is the frictional coefficient which is between 0.4 and 0.6. By substitution of the eqs. (6) and (7) into eq. (8), the governing formula can be obtained:
Equation (9) can be written in the following form to give the expression for the load development along the chain:
Now substituting eq. (10) into eq. (7) and considering the small values of θ leads to:
where Q is the average bearing resistance (per unit length of chain) over the depth range of z to D. Equation (11) allows the change in chain angle to be estimated directly regarding the chain tension at the attachment point, Ta and the average bearing resistance. Since the chain angle is close to the zero at the seabed, the eq. (11) can be simplified as below:
Combining eq. (10) with eq. (12) results in an equation that describes frictional development along the chain:
where To is chain tension at mudline; T* is normalized tension that is given by:
Assuming a soil layer with bearing capacity proportional to depth, for a surface chain angle equal to zero, Neubecker and Randolph (1995) proposed the following equation for chain profile:
where z* and x* are depth and horizontal distance normalized by D, respectively.
Incorporating the anchor chain weight into the formulation to obtain a higher accuracy for general tension capacity, the following formulation was obtained:
where w is chain self-weight per unit length; and s is the length of chain.
Anchor holding capacity
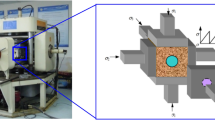
In the present study, the drag anchor was assumed to move through the soil in a quasi-static condition. Although the anchor has some finite velocity, the magnitude of this velocity is small so that the inertial considerations can be neglected. To obtain the anchor holding capacity, the limit state model proposed by Neubecker and Randolph (1996a) was adopted. Compared with the plastic loci approach adopted by Moharrami and Shiri (2018), incorporation of the limit state approach eliminated the need for time-consuming finite element analysis. Figure 3 shows the three-dimensional wedge failure mechanism for calculation of the anchor capacity at pad eye (Ta).

The three-dimensional failure wedge in plan & side view and force system of the anchor
Using the force equilibrium system shown in Fig. 3, the first step is to calculate the cross-section area of the wedge:
where H is the depth of fluke tips; h is the back edge of the fluke; β is the inclination of the fluke, and λ is the failure wedge angle. The lateral extent of failure wedge can be calculated by:
where ψ is the dilation angle. Now, the mobilized soil mass can be obtained based on the known values of X and A:
where Ws is the mobilized soil mass; B is the width of the fluke. The side friction (SF) should be determined to satisfy limit equilibrium formulation:
where ∅′is the soil friction angle.
Using the force equilibrium system shown in Fig. 3, the shank force could be driven from the standard bearing capacity as below:
where Fs is the shank force; As is the area of the shank; ds is the average depth of the shank; and Nqs is the bearing factor for the shank. There are still two unknown forces acting on the soil wedge, i.e., the fluke force (Ff) and soil reaction (R). By considering horizontal and vertical force equilibrium, the unknown forces can be simply determined. Now, using the force equilibrium of the anchor alone, the unknown forces in the back of the fluke (Ffb) and the chain tension (Ta) can be calculated based on horizontal and vertical force equilibrium. This procedure was iteratively continued with different values of the failure wedge angle (λ) to calculate the minimum upper bound estimate of the anchor holding capacity (Ta).
The MK5 and MK6 anchors that were considered in this study have a fluke length to fluke thickness ratios (Lf/df) of 6.67 and 3.09 respectively (see Fig. 4).

Schematic of the modeled anchor in the present study (Vryhof Anchors, 2010)
The geometrical properties of these anchors are provided in Table 1.
Table 2 shows the calculated values of the holding capacities or design resistances (Rd,a) and the corresponding line tension angles (θa) at the pad-eyes for the selected MK5 and MK6 anchors.
The selection of these anchor families facilitated making comparisons between the current study and the results obtained in earlier investigations in clay.
Anchor kinematics
The anchor trajectory is a key parameter that can be used for interpretation of the obtained holding capacities and reliability indexes in the later stages. The solution proposed by Neubecker and Randolph (1996c) for prediction of the anchor trajectory was adopted, where three main conditions were set to ensure kinematic admissibility of the anchor model. These conditions put constraints on the absolute and relative displacements of the anchor and the soil wedge and hence are helpful in defining the kinematics of the system. First, the soil wedge will move at the dilation angle to the failure surface. Second, displacement of the soil relative to the anchor (dusa) must be parallel to the upper face of the flukes. Third, the anchor must maintain contact with the soil behind it by traveling in a direction parallel to the back of the fluke. The third condition applies when there is a force on the rear of the flukes so that when this force becomes zero, the anchor is free to travel away from the soil behind it and this condition is meaningless. These three conditions for anchor and soil displacements fully describe the kinematics of the system so that for a given anchor displacement the magnitudes and directions of the soil displacement and the relative anchor-soil displacement can be easily calculated. Figure 5 shows the main flowchart used for incorporation of the anchor kinematics.

Flow chart for analysis of anchor embedment history
The minimum work approach was applied and the penetration ∆y and rotation ∆θ were considered to obtain the incremental anchor displacements.
Developing iterative macro for prediction of anchor performance
The static limit state and kinematic models were coded into an Excel spreadsheet using VBA macros to calculate the ultimate holding capacity of the anchor-chain system and the anchor trajectory. The developed spreadsheet performed a series of iterative analyses with the calculation procedure outlined in Fig. 5.
The proper performance of developed Excel spreadsheet was validated against the published experimental and analytical studies (Neubecker and Randolph, 1996c), the sample design codes (NCEL, 1987), and the referenced manufacturers datasheets (Vryhof Anchors, 2010) (see Fig. 6).

Validation of the performance of developed VBA macro
The input parameters of the validation case study are given in Table 3.
Figure 6 shows a perfect agreement between the developed VBA macro and the results published by the developer of the original limit state anchor solution.
Time-domain mooring analysis of semisubmersible platform
A generic semisubmersible platform located in the Caspian Sea was considered with eight leg catenary spread mooring system for dynamic mooring analysis (see Fig. 7). Similar configuration with earlier studies (Moharrami and Shiri (2018)) was adopted to enable a comparison of the results. Each mooring line comprised of three different parts, i.e., the upper, middle and lower segments. The upper and lower segments were made of chain, while the central segment was wire rope. A water depth of 700 m was assumed and a finite element model was developed using OrcaFlex software to obtain the dynamic line tensions at the touchdown points (TDP).

Schematic plan view of the mooring line arrangement
Performing a three hours’ time-domain simulation, the most critically loaded line was detected for the environmental loads with a 100 years return period (i.e., Hs = 9.5 m, TP = 12.8 s, and U10 = 29 m/s). A similar head sea response amplitude operator (RAO) of the platform published by Moharrami and Shiri (2018) was adopted to facilitate comparison of the results.
The key outcome of dynamic mooring analysis is summarized in Table 4.
The main output of the analysis includes the parameters Td (design line tension), θo (line angle at mudline), Tmean-C (characteristic mean tension), and Tdyn,max-C (characteristic mean maximum dynamic tension) that will be used for reliability assessment in the next section.
First-order reliability analysis
First-order reliability method (FORM) was adopted through an iterative procedure to obtain the probabilistic results by incorporation of uncertainties in seabed soil properties and environmental loads. The probabilistic modeling of anchor capacity was conducted by using the limit equilibrium method. The embedment profile and the frictional capacity of the chain were also accounted for in the calculation of ultimate holding capacities. The response surface approach and appropriate probability density functions were used to take into consideration the uncertainties of the environmental loads and metocean variables including significant wave height, spectral peak period, wind velocity, and consequently the stress distribution throughout the catenary lines. A target failure probability of 10E-5 was set assuming a consequence class of 2 as per recommendations made by DNV-RP-E301 (2012). Further details are provided in the coming sections.
Limit state function
In order to establish the limit state function, care should be taken on considering the contribution of the frictional chain capacity and its effect of the complexity of the reliability analysis. If the limit state function is formulated at the pad-eye, the statistical dependence between the applied load and the capacity of the anchor must be determined, and the complexity of the reliability analysis will be significantly increased. On the other hand, the current study aims to focus on uncertainties existed in the evaluation of anchor capacity rather than the chain capacity. Therefore, an alternative approach that has also been used by other researchers (Choi, 2007; Silva-González et al., 2013) was adopted to prevent unnecessary complication in the reliability analysis. The limit state function was formulated at mudline, but the chain-soil interaction impacts were considered in the calculation of the ultimate holding capacity. This approach facilitated the reliability analysis by keeping the variables independence between the line tension and the capacity of the anchor at the mudline. Therefore, the limit state function was written as follows (DNV-RP-E301, 2012):
where Rd is the design anchor and chain system capacity at mudline.
The design line tension at mudline (Td) was defined as (DNV-RP-E301, 2012):
where Tmean − C is the mean line tension due to pretension and mean environmental loads; Tdyn − C is the dynamic line tension due to low frequency and wave frequency motions; γmean is the partial safety factor for the mean line tension; and γdyn-c is the partial safety factor for the dynamic line tension. The values of γmean and γdyn-c for consequence class 2 and the dynamic analysis were taken as 1.40 and 2.10, respectively (DNV-RP-E301, 2012). Both Tmean-C and Tdyn,max-C are expressed at the mudline as functions of the significant wave height (Hs), peak period (Tp), and wind velocity (U10) representing an extreme sea-state. Consequently, the limit state function can be written as:
The anchor capacity and load tensions are evaluated in the direction of the mooring line at the touchdown point, where the anchor line starts to embed (i.e., at an angle θo with the horizontal direction). The probability of failure PF during a given extreme sea state was defined as:
By using a Poisson model for the occurrence of extreme sea states (Silva-González et al., 2013), the annual probability of failure PFa was written as an exponential function of the probability of failure PF:
where λ is the ratio of the number of extreme sea states to their observation period (in years); for small values of \( {\uplambda}_{{\mathrm{P}}_{\mathrm{F}}} \), the annual probability of failure is PFa ≈\( {\uplambda}_{{\mathrm{P}}_{\mathrm{F}}} \).
Probabilistic modelling of anchor capacity
The crucial factors that were used to construct the anchor capacities database were including the peak friction angle (ϕp), the dilation angle (ψ), and the soil density (γ′). The mean value of peak friction angle (\( {\upmu}_{\varnothing_{\mathrm{p}}} \)) for lognormal distribution was set to 35° with a coefficient of variation (\( {\updelta}_{\varnothing_{\mathrm{p}}} \)) equal to 0.05 to take into consideration the uncertainty due to systematic test variations and spatial variations of the soil properties (Basha and Babu, 2008; Anchor manual, 2010). A normal distribution with a mean value (μψ) of 8.49° and a coefficient variance (δψ) of 0.28 was adopted for the sand dilation angle (ψ) that was calculated by using Bolton’s empirical equation for sand (Bolton, 1986; Phoon, 1999; Simoni and Houlsby, 2006). The soil density was represented by a normal distribution with a mean value (\( {\upmu}_{\gamma^{\prime }} \)) of 10.07 and a coefficient variance (\( {\updelta}_{\gamma^{\prime }} \)) of 0.02 (Neubecker, 1995; Phoon, 1999; Simoni and Houlsby, 2006). To construct the capacity database, 5000 simulations were conducted by adopting different values of ϕp, ψ and γ′.
Figure 8 shows the fitted distribution and the histograms of the anchor capacities at mudline for MK5 and MK6 anchors with Lf equal to 3.624 (Left) and 3.961 (Right).

Histograms of simulated and fitted capacities at mudline, (a) absolute frequency, (b) Cumulative frequency
Table 5 shows the mean (μ), standard deviation (σ), median value (m), and coefficient of variation (δ) of anchor capacities at pad-eye and mudline for MK5 (with fluke lengths of 2.707, 3.166, 3.41 and 3.624 m) and MK6 (with fluke lengths of 2.958, 3.46, 3.728 and 3.961 m).
The variation of the mean and standard deviation of anchor capacity versus the fluke length for the MK6 anchor family at pad-eye and mudline are illustrated in Fig. 9 to show the capacity distribution.

The mean and standard deviation of anchor capacity versus fluke length; MK6
The mean capacity at mudline is 10 - 14% higher than the mean capacity at pad-eye. Commonly in all anchor models, when the fluke length and fluke thickness increase, the differences between capacity at the pad-eye and mudline increase. The same conclusion can be driven for differences between median capacities at the pad-eye and the mudline, but in some anchor models (MK6 with Lf = 3.961 m) the difference between median at the mudline and pad-eye decreases by an increment of fluke length and thickness. The coefficients of variation of the capacity at pad-eye and mudline are about 23-27% for all MK5 anchor families and are about 16-18% for all MK6 anchor families.
Probabilistic modelling of line tension
The response surfaces were developed using an approach proposed by Silva-González et al. (2013), where a Gaussian process was adopted to define the dynamic line tensions (Sarkar and Eatock Taylor, 2000; Choi, 2007). The maximum expected dynamic line tension during the extreme sea state (presented by a random vector of r uncertain environmental variables (Θ)) was expressed based on the model proposed by Davenport (1964):
where ∆t is the duration, νΘ = ν(Θ) and σT,Θ = σ(Θ) are the mean crossing rate and the standard deviation of the dynamic line tension, respectively. A second order polynomial expansion was used to represent both the line tension Tmean, and the predicted maximum dynamic line tension at mudline Tdyn, max by using Θ:
Where Y(Θ) is the response of interest, and Θ is the r × 1 vector of environmental variables. The following unknown coefficients c, a (r × 1) and b (r × r) were determined by response analysis. To develop response surfaces, seven key environmental parameters were investigated on the mooring system in the Sardar-e-Jangal gas field in the Caspian Sea. A database of 8100 different combinations was built using divergent environmental variables such as significant wave height (Hs), the direction of the wave (dw), the velocity of wind (U10), peak period (Tp), route of wind (dww), the speed of surface current (Uc), and current path relative to wave direction (dwc). The mooring line with the highest load was taken into consideration to obtain the response surfaces. Figure 10 illustrates the response surfaces of both mean and maximum expected dynamic line tension for the domains of the peak wave period and significant wave height. The extreme sea states were identified by using a storm event. A time interval was determined around the peak period using clustering and de-clustering (tpeak - ∆Tcluster, tpeak - ∆Tcluster). In the defined interval, the extreme sea state happens if the sea state at tpeak experiences a significant wave height higher than a threshold amount (Hs ≥ Hsth).

Response surfaces for Tmean and Tdyn, max
Other environmental variables were considered based on tpeak. The extreme ecological quantities of the Caspian Sea were determined according to the three-hour time series during a 24 years observation period provided by metocean studies. Using a set of 24 extreme sea states throughout the hindcast time series and using the peak over threshold method, the marginal probability distributions of Θ = [Hs, Tp, U10]T were generated. The magnitude of the mean annual rate, λ, was 30/24 = 1.25 per year based on the maximum probability estimate. The marginal distributions with the best fitting, the maximum probability estimate parameters; and the correlation coefficients for three crucial environmental variables are provided in Table 6 and Table 7.
Results of reliability analysis
First-order reliability method (FORM) was used to carry out the reliability analyses. In this study to ignore the convergence problems in FORM method, a narrow and appropriately weighted Gaussian distribution was used to model the finite probability at a lower bound capacity (Melchers et al., 2003). The variation of the annual reliability index as a function of dry anchor weight and fluke length are shown in Fig. 11, where each point on the plot (a) corresponds to an equivalent point in the plot (b) and vice versa. For instance, point 4 in both parts of Fig. 11 represents an MK5 anchor with Lf = 3.961 m and Wa = 12 t with an annual reliability index of 3.92.

Annual reliability index versus (a) fluke length, and (b) anchor weight
As shown in Fig. 11, to achieve specified target reliability, different anchor families with different fluke lengths and weights are available. For example, for desired reliability index of βannual = 2, either MK5 with Lf = 3.46 m and Wa = 8 t (point 2) or MK6 with Lf = 2.95 m and Wa = 5 t (point 5) could be used. Figure 11 shows that for the anchors with the close magnitude of fluke length but different weights (from MK5 and MK6), the corresponding reliability levels are remarkably different. For instance, the 10 tones MK5 and 8 tones MK6 anchors with Lf values of 3.41 m (point 3) and 3.46 m (point 6) have a reliability index of 3.2 and 5.08, respectively. This shows that despite the clay (Moharrami and Shiri, 2018) the anchor weight is less influential in the sand, so a lighter MK6 anchor gives higher holding capacity, higher reliability index, and consequently lower failure probability (reduces from 0.0119 to 1.5 × 10−7) compared with a heavier MK5 anchor. These ranges of failure probability are commonly used for ultimate limit state design in offshore systems (DNV-OS-E-301, 2010; DNV-OS-F201, 2010; DNV-OS-F101, 2013). As observed in Fig. 11, the fluke length has a significant effect on reliability indexes in both anchor families; the larger fluke length, the higher holding capacity, the higher reliability index, and the lower probability of failure.
Figure 12 illustrates the logarithmic variation of failure probability (log (PFa)) versus anchor weight and fluke length with a linear curve fit for MK5 and MK6. The curves’ slopes in Fig. 12 indicate the required increment of anchor weight and fluke length to decrease the annual probability of failure for one order of magnitude (by a factor of 10). These results can be used in a life cycle cost-benefit analysis, where the modeling initial cost is required as a function of the probability of failure. The initial cost can increase by increasing material mass and volume, which are associated with anchor weight and fluke length, and therefore deduction in failure probability. By observing both curves in Fig. 12 the slopes of MK6 are remarkably higher than MK5, so that a small deviation in fluke length and fluke weight results in a considerable change in failure probability and reliability index. These required increasing rate of the anchor weight and the fluke length for MK5 are 1.8542, 0.2702 and for MK6 are 0.6408, 0.1072, respectively. Therefore, to improve the reliability index from 2.26 to 3.91, a 24% increase in weight and 9% increase in fluke length are needed in MK5, and an 8% increase in weight and 4% increase in fluke length is required in MK6.

The logarithm of failure probability versus (a) fluke length, and (b) anchor weight
As shown in Fig. 12, in MK6 anchor families, beyond an anchor weight of 8 t and fluke length of 3.46 m the annual reliability index and the logarithm of failure probability approaches the infinity that is shown by dashed lines.
Equivalent reliability study in sand and clay
The reliability assessment results obtained from the current study in the sand was compared with the earlier published studies in clay (Moharrami and Shiri, 2018) to provide an in-depth insight into the problem. The comparative reliability assessment was conducted to determine the anchor classes (commonly referred to by their weight in practice) resulting in similar reliability indexes. Figure 13 shows the comparative reliability indexes obtained for different anchor weights from MK5 and MK6 families in sand and clay. The plots show the anchor classes in sand and clay that result in a close magnitude of reliability indexes. For instance, an 8 t MK5 anchor in the sand (point 1) results in an almost same reliability index (2.26 and 2.48) given by a 15-t MK5 anchor in clay (point 5). In MK6, the reliability indexes of anchors heavier than 8 t are infinity, so there are only two points for sand.

Equivalent anchor class (weight) comparison between sand & clay
Table 8 provides the map of equivalent anchor classes in sand and clay resulting in a fairly close reliability index.
Further studies can be conducted to determine the equivalency map between the different anchor groups, e.g., MK3, MK5, MK6, and even other anchors in the market. This kind of information can provide better insight for operators and designers to select the required anchors with the desired level of reliability that may vary depending on project conditions. As instance, the results presented in Table 8 indicates that for mobile platforms with existing classes of anchors, the number of anchoring field trial in sand seabed to achieve the target reliability can be reduced in comparison with clay and this can result in a considerable saving in the resources.
Idealization of anchor geometry
It is not feasible either in numerical or analytical studies to model the complex geometry of commercial anchors. Therefore, the anchor geometry is commonly idealized by simple rectangles to represent the effective bearing areas of fluke and shank (see Fig. 14). For this purpose, the length of rectangular fluke and shank are assumed equal to the length of the commercial anchor. Then the width of the rectangles is adjusted to result in an equivalent projected area (Neubecker and Randolph (1996a)). As the accuracy of the equivalent projected area increases, the predicted anchor capacity becomes more realistic and approaches to the capacities obtained through field trials.

Effective dimensions of MK5 anchor (Plan view)
It was noticed during the current study, that this geometrical idealization process might affect the reliability indices to some extent. It was investigated by examining two different cases of idealized geometry of four different weights of MK5 anchor with different level of accuracies in the calculation of the equivalent projected area (see Table 9). The resultant anchor holding capacities were obtained and the corresponding annual reliability index and annual failure probability were compared.
The mean and standard deviation of MK5 anchor capacity for Case 1 and 2 were plotted in Fig. 15 as a function of fluke length to obtain the capacity distribution.

The mean and standard deviation of anchor capacity versus fluke length
The annual reliability indices were obtained and compared in Fig. 16. The results show that a 5.9 to 7.7% variation in shank effective width and 13.7 to 14.3% variation in fluke effective width have resulted in up to 12.5% variation in the annual reliability indices. The lowest impact has occurred in moderate anchor weights (i.e., 7 to 9 tones).

Annual reliability index versus anchor weight
These results show that the geometrical idealization procedure needs particular attention to improve the accuracy of the anchor holding capacity and consequently the results of reliability studies. This can be achieved by adjusting the idealization approach through comparisons with the existing manufacturer and field trials data in every specific anchoring project. It would be highly beneficial if the obtained results in the current study were compared to a benchmark design of the anchor geometry without idealization. However, it is not feasible at the moment due to having no analytical solution to model the real anchor geometry. In addition, using advanced large deformation finite element (LDFE) analysis or remeshing and interpolation technique with small strain (RITSS) analysis to run thousands of extremely time-consuming LDFE analysis for reliability studies is not currently feasible. These limitations need to be resolved by developing improved analytical and numerical solutions.
Conclusions
The reliability analyses of the drag embedment anchors in the sand along with the effect of geometrical idealization were investigated using analytical and numerical approaches. The key observations are summarized as follows:
The costly in-field testing procedure recommended by design codes for estimation of the anchor capacities are identical for all of the anchor families, seabed soil types, environmental loads, and operation conditions. This approach neglects the reliability effects associated with various uncertainties and results in less cost-effective solutions. The current study showed that anchoring design procedures could be improved by performing reliability studies using analytical and numerical models.
The existing theoretical anchor solutions are developed based on simplified anchor geometries. The study showed that idealization of anchor geometry affects the reliability indices. Further investigations and improved numerical and analytical solutions are required to determine the best practice for the idealization of anchor geometry and approach the results of field trials.
A target reliability index for a given anchor family in the sand can be achieved by a lighter anchor compared to the clay. It is challenging to determine a corresponding set of soil parameters in clay and sand to result in an identical reliability index. However, further studies in this area can be beneficial in proposing a more cost-effective infield testing procedure depending on the seabed soil properties.
The geometrical configuration of the anchors, particularly the fluke length, is the most influential parameters in determining the reliability indices. The anchor weight has a beneficial contribution to achieving a higher level of reliability but to a less extent. A well-designed anchor geometry can significantly dominate the weight effect. For instance, some lighter MK6 anchors result in a higher reliability index compared to heavier MK5 models due to their superior geometrical design.
It is worth mentioning that the reliability models for assessing the anchor capacities can be significantly improved by having access to the in-field test databases and corresponding seabed soil properties, and the statistics of failures. These kinds of information are mandatory for obtaining absolute reliability indices or failure probabilities. However, the closed-form solution is highly beneficial for performing comparative studies and improving the recommended practices. Also, the current study is limited to one anchor group and a specific geographical location. Further investigations using different anchors and a range of environmental loads, and system configuration would provide much better insight into this challenging area of engineering.
Abbreviations
- As :
-
area of shank.
- d :
-
nominal chain diameter.
- D :
-
pad-eye embedment depth.
- df :
-
fluke thickness.
- ds :
-
average depth of the shank.
- dua :
-
the absolute displacement of the anchor.
- dus :
-
soil wedge displacement.
- dusa :
-
displacement of the soil relative to the anchor.
- dw :
-
wave direction.
- dwc :
-
current direction relative to wave.
- dww :
-
wind direction relative to wave.
- En :
-
normal circumference parameter.
- En :
-
tangential circumference parameter.
- f :
-
form factor (Neubecker and Randolph, 1996a).
- F :
-
friction force.
- Ff :
-
the fluke force.
- Ffb :
-
the force on the back of the fluke.
- Fs :
-
the shank force.
- h :
-
back edge of the fluke.
- H :
-
depth of fluke tips.
- Hs :
-
significant wave height.
- Lf :
-
fluke length.
- Lf :
-
caisson length (Silva-González et al., 2013)
- Ls :
-
shank length.
- Nq :
-
standard bearing capacity factor.
- Nqs :
-
shank bearing factor.
- pF :
-
probability of failure.
- pFa :
-
annual probability of failure.
- q :
-
bearing pressure.
- Q :
-
normal soil reaction on chain segment.
- \( \overline{\mathrm{Q}} \) :
-
average bearing resistance per unit length of chain over embedment depth.
- R :
-
anchor capacity at mudline.
- R :
-
soil reaction.
- Ra :
-
anchor capacity at pad-eye.
- Rd :
-
design anchor capacity at mudline.
- Rd,a :
-
design resistances at the pad-eye.
- ri :
-
distance between point i and anchor shackle.
- s :
-
length of chain.
- SF :
-
side friction.
- T :
-
line tension.
- Ta :
-
line tension at the pad-eye.
- Td :
-
design line tension at mudline.
- Td,a :
-
design tensions at the pad-eye.
- Tdyn,max :
-
mean maximum dynamic line tension.
- Tdyn,max-C :
-
characteristic mean maximum dynamic tension.
- Tmean :
-
mean line tension.
- Tmean-C :
-
characteristic mean line tension.
- To :
-
Chain tension at mudline.
- Tp :
-
spectral peak period.
- T* :
-
normalized tension.
- ∆t :
-
extreme sea state duration
U10
wind velocity.
- Uc :
-
surface current velocity direction.
- w :
-
chain self-weight per unit length.
- Wa :
-
anchor dry weight.
- Ws :
-
the mobilized soil mass.
- xa :
-
anchor horizontal displacement.
- X :
-
absolute displacement of point i.
- x* :
-
horizontal distance normalised by D
- ∆x :
-
absolute penetration increment of the origin Y
absolute displacement of point i
- ∆y :
-
absolute penetration increment of the origin z
depth below mudline
- z* :
-
depth normalised by D
- β :
-
inclination of fluke
- β :
-
reliability index
- βannual :
-
annual reliability index
- ∅′ :
-
soil friction angle
- ∅p :
-
sand peak friction angle
- γ′ :
-
effective unit weight of soil
- γdyn :
-
partial safety factor on dynamic line tension
- γmean :
-
partial safety factor on mean line tension
- λ :
-
failure wedge angle
- λ :
-
mean annual rate of extreme sea states
- ηa :
-
anchor efficiency
- μ :
-
chain-soil friction coefficient
- Θ :
-
vector of environmental variables
- θ :
-
line tension angle
- θa :
-
line tension angle at the pad-eye
- θi :
-
polar coordinate angle of point i
- θfs :
-
fluke-shank angle
- θo :
-
line tension angle at mudline
- ∆θ :
-
rotation increment of the origin
- ψ :
-
dilation angle
References
API RP 2SK (2008) Design and Analysis of Stationkeeping Systems for Floating Structures
Aubeny CP, Chi C (2010) Mechanics of drag embedment anchors in a soft seabed. J Geotech Geoenviron Eng 136:57–68. https://doi.org/10.1061/(ASCE)GT.1943-5606.0000198
Basha BM, Babu GLS (2008) Target reliability based design optimization of anchored cantilever sheet pile walls. Can Geotech J 45:535–548. https://doi.org/10.1139/t08-004
Bolton MD (1986) Discussion: the strength and dilatancy of sands. Géotechnique 37:219–226. https://doi.org/10.1680/geot.1987.37.2.219
Choi YJ (2007) Reliability assessment of foundations for offshore mooring systems under extreme environments. PhD Dissertation, University of Texas at Austin. USA
Clukey EC, Gilbert RB, Andersen KH, Dahlberg R (2013) Reliability of Suction Caissons for Deep Water Floating Facilities 1991, 456–474. https://doi.org/10.1061/9780784412763.035
Davenport AG (1964) Note on the distribution of the largest value of a random function with application to gust loading. Proc Inst Civ Eng 28:187–196. https://doi.org/10.1680/iicep.1964.10112
DNV-OS-E-301 (2010) Position Mooring. Offshore Standard
DNV-OS-F101 (2013) Submarine Pipeline Systems. Offshore standartd
DNV-OS-F201 (2010) Dynamic Risers. Offshore Standard
DNV-RP-E301 (2012) Design and Installation of Fluke Anchors
Ma KT, Shu H, Smedley P, L'Hostis D, Duggal A (2013) A historical review on integrity issues of permanent mooring systems. Offshore Technology Conference, 6-9 May, Houston, Texas, USA. https://doi.org/10.4043/24025-MS
Melchers RE, Ahammed M, Middleton C (2003) FORM for discontinuous and truncated probability density functions. Struct Saf 25:305–313. https://doi.org/10.1016/S0167-4730(03)00002-X
Moharrami MJ, Shiri H (2018) Reliability assessment of drag embedment anchors in clay for catenary mooring systems. Mar Struct 58:342–360. https://doi.org/10.1016/j.marstruc.2017.12.005
Montes-Iturrizaga R, Heredia-Zavoni E (2016) Reliability analysis of mooring lines using copulas to model statistical dependence of environmental variables. Appl Ocean Res 59:564–576. https://doi.org/10.1016/j.apor.2016.07.008
NCEL (1987) Drag embedment anchors for navy moorings. Naval Civil Engineering Laboratory, Port Hueneme, Calif., Techdata Sheet 83-08R
Neubecker SR (1995) The behaviour of drag anchor and chain systems, PhD Thesis, Department of Civil Engineering, The University of Western Australia
Neubecker SR, Randolph MF (1996a) The static equilibrium of drag anchors in sand. Can Geotech J 33:574–583
Neubecker SR, Randolph MF (1996b) The performance of drag anchor and chain systems in cohesive soil. Georesources Geotech 14:1–7
Neubecker SR, Randolph MF (1996c) The kinematic behaviour of drag anchors in sand. Can Geotech J 33:584–594. https://doi.org/10.1139/t96-084-306
Neubecker SR, Randolph MF (1995) Profile and frictional capacity of embedded anchor chains. Geotech Eng 121:797–803
O’Neill MP, Bransby MF, Randolph MF (2003) Drag anchor fluke–soil interaction in clays. Can Geotech J 40:78–94. https://doi.org/10.1139/t02-096
O’Neill MP, Randolph MF, Neubecker SR (1997) A Novel Procedure For Testing Model Drag Anchors, in: Proceedings of the 7th International Offshore and Polar Engineering Conference
Phoon KK (1999) Characterization of geotechnical variability. Can Geotech J 624:612–624
Rendón-Conde C, Heredia-Zavoni E (2016) Reliability analysis of suction caissons for moored structures under parameter uncertainties. Struct Saf 60:102–116. https://doi.org/10.1016/j.strusafe.2016.02.004
Sarkar A, Eatock Taylor R (2000) Effects of mooring line drag damping on response statistics of vessels excited by first- and second-order wave forces. Ocean Eng 27:667–686. https://doi.org/10.1016/S0029-8018(99)00014-1
Silva-González F, Heredia-Zavoni E, Valle-Molina C, Sánchez-Moreno J, Gilbert RB (2013) Reliabilitystudy of suction caissons for catenary and taut-leg mooring systems. Struct Saf 45:59–70. https://doi.org/10.1016/j.strusafe.2013.08.011
Simoni A, Houlsby GT (2006) The direct shear strength and dilatancy of sand-gravel mixtures. Geotech Geol Eng 24:523–549. https://doi.org/10.1007/s10706-004-5832-6
Thorne CP (2002) Penetration and load capacity of marine drag anchors in soft clay. J Geotech Geoenviron Eng 124:945–953. https://doi.org/10.1061/(asce)1090-0241(1998)124:10(945)
Valle-molina C, Heredia-zavoni E, Silva-gonzález FL (2008) Reliability analyses of suction caissons for FPSO systems, in: International Conference on Offshore Mechanics and Arctic Engineering. pp. 1–6
Vryhof Anchors (2010) Anchor manual. Krimpen ad Yssel, The Netherlands
Wang LZ, Guo Z, Yuan F (2010) Quasi-static three-dimensional analysis of suction anchor mooring system. Ocean Eng 37:1127–1138. https://doi.org/10.1016/j.oceaneng.2010.05.002
Acknowledgments
The authors gratefully acknowledge the financial support of this research by Memorial University of Newfoundland through VP start-up fund and school of graduate studies (SGS). The technical advice of Mr. Mohammad Javad Moharrami is also kindly acknowledged.
Author information
Authors and Affiliations
Corresponding author
Appendix 1
Appendix 1
The user interface of the developed VBA macro is shown below. The macro receives the input parameters related to the anchor configuration, seabed soil parameters, and anchor kinematic parameters as the input values. Then using the adopted limit state solution the holding capacity and key outputs are calculated.

User interface of developed VBA macro for calculation of anchor holding capacity
Rights and permissions
About this article

Cite this article
Aslkhalili, A., Shiri, H. & Zendehboudi, S. Reliability assessment of drag embedment anchors in sand and the effect of idealized anchor geometry. Saf. Extreme Environ. 1, 39–57 (2019). https://doi.org/10.1007/s42797-019-00006-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42797-019-00006-5