
Abstract
Underground mining accidents have the potential of leaving miners trapped in unknown and life-threatening locations for an extended period of time. The lives of the trapped and unaccounted-for miners are at risk and require emergency rescue. But, the primary tracking systems are highly susceptible to damage during accidents and are most likely to be defunct and inoperable post-accident. This prompted the need for a robust and reliable post-accident communication and locator system. Subsequently, the through-the-earth (TTE) communication systems were developed and tested in underground mines. Under ideal conditions, these systems are capable of post-accident full-duplex two-way voice, text, and data communication and fingerprint detection of the geolocations of the trapped miners. This is achieved through a wireless link established by the transmission of electromagnetic and seismic waves between surface and underground, even in challenged underground environments. Unlike the primary tracking systems, the TTE communication systems do not require extensive shaft-to-workplace backbone infrastructure. This has made the TTE systems to be less susceptible to damage and therefore suitable for post-accident communication. Instead, the Earth’s crust acts as the signal transmission medium which forms an uplink and downlink communication path. This is achieved by injecting an electric current into the ground using electrodes, by transmitting magnetic fields from a radiating loop antenna, or by inducing fingerprint geolocations using seismic waves. Range and data rates are the critical requirements for the effectiveness of these systems and are dependent on factors such as the antenna design, frequency, and rock properties. This study provides a review of the applications of the different types of TTE communication systems, their evolution, factors that affect them, and techniques for improving their efficiencies and capabilities. These systems present the mining industry with an opportunity to improve safety by providing post-accident communication and locating trapped miners as quickly as possible. This will improve their survival chances and ultimately reduce fatality rates in the mining industry.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Miners can survive the initial event of an accident but become trapped or lost in unknown and life-threatening locations underground. At this point, the locations of the trapped miners are of utmost importance as a matter of life and death, and emergency rescue is urgently required in order to save the survivors. During an accident, the primary tracking systems are likely to be damaged due to their extensive infrastructure installed underground. This prompted the need to develop a system that can survive an accident and remain operational post-accident. Subsequently, the through-the-earth (TTE) communication systems became the solution for post-accident communication. These systems are less likely to be impacted and damaged by accidents and thus can remain operational post-accident, and available for use by the trapped miners [1]. This is because they make use of minimal infrastructure as they do not require the installation of extensive backbone infrastructure from surface to shaft and to the working face. These systems provide post-accident communication between surface and underground through the transmission of signals through the Earth’s crust wirelessly. The TTE communication systems are divided into electromagnetic and seismic waves (Fig. 1). The TTE electromagnetic wave communication system is further divided into magnetic inductive (longer and shorter range) and electrode-based signal-transmission mechanisms.

Classification of through-the-earth communication systems
Both the magnetic inductive and electrode-based systems are capable of two-way voice, text, and data communication with the trapped miners, while the seismic wave system makes use of seismic wave fingerprinting to triangulate the locations of trapped miners. These systems are based on the transmission of magnetic field or electric field at low frequency (LF) (30–300 kHz), very low frequency (VLF) (3 to 30 kHz), voice or ultra-low frequency (ULF) (300 Hz to 3 kHz), and extremely-low frequency (ELF) (30 to 300 Hz), wirelessly through rock [2]. This is achieved through a wireless uplink and downlink that makes use of the earth as the transmission channel. At higher frequencies, the electromagnetic waves begin to experience high attenuation rates and cannot be efficiently transmitted through rock [3, 4]. The transmission of signals is more difficult than it is to detect them. As a result, the high attenuation rates can result in poor to no communication and a very limited range. Hence, the earliest research in this field focused on mechanisms and techniques to overcome the high attenuation effects [5,6,7]. The use of lower frequency signals, generally below 10 kHz, was the first option to minimize the high attenuation rates within a dissipative medium [8], due to the Earth’s skin depth effect, which limits the range of communication. Although the lower frequency signals have a better penetration through the earth, their data transmission rates are reduced. This is especially due to the heterogeneous and anisotropic nature of the rock. The skin depth increases with an increase in the conductivity of the earth and the frequency of the signals. Apart from attenuation, several other factors that affect the signal transmission through rock were identified, including signal pathloss due to scattering, reflection and diffraction, and external noises and interferences. For example, external or electrical noises from the mine can cause interferences with the signals. The noise effects are well studied by Hjelmstad and Ackerson [9] in their developed TTE electromagnetic waves fire warning alarm system. They developed a unidirectional TTE system that could only achieve one-way text communication for emergency fire warning alarm and evacuation. However, recently developed TTE systems are capable of bidirectional and full-duplex voice, text, and data transmission.
Research pertaining to the possibility of transmitting electromagnetic waves through the earth dates back to the work that was conducted by Nicola Tesla as early as 1899 [10]. This was after the earth was discovered to be electrically conductive, meaning that it can absorb and scatter radio waves. The research indicated that the signals can be transmitted and received for up to 20 km subsurface. This fuelled further research in the 1920s to evaluate other factors that influence the transmission of electromagnetic waves through rock [11,12,13]. This included factors such as variations in the conductivity and dielectric properties of the rock (Fig. 2). The finite electrical conductivity of the earth can range from 0.1 to 10 mS/m for dry and wet rock, respectively [14]. Research did not only focus on the factors that can affect but also on those that can enhance the transmission efficiencies [15,16,17]. Considerations were made on the permittivity and the permeability of the rocks, as well as the possibilities of the presence of metallic conductors such as steel columns and cables.

Variation of conductivity and dielectric properties of the earth [10]
Radio communication occurs in the near-field region where electric and magnetic dipole antennas can be used to transmit signals. In this region, the electromagnetic waves are quasi-static with a dominance of capacitance and inductance effects than radiation. The electromagnetic waves are transmitted by magnetic, electric, or current flux, on the assumption that a conductive rock is semi-infinite and homogenous. The magnetic systems rely on the generated magnetic flux density, while the electrode-based systems rely on current flux density. The magnetic flux is generated by current flowing through the loop of the antenna, while current flux density is generated by a pair of electrodes buried in the ground. An electric flux is generated from electrodes carrying steady current but is rarely used in the TTE communication systems. The three basic types of antenna according to the field strength generated are summarized in Table 1 based on their field strength and the respective antenna flux density that they generate.
2 Evolution of the TTE Communication Systems
The research on TTE communication systems was focused on developing a system for locating trapped miners based on radio communication within the Earth’s crust [18]. Although the bulk of the research was conducted by the United States Bureau of Mines (USBM), the first-ever successful system was eventually developed in South Africa in the 1940s [19]. This encouraged further research and development work which continued in the underground ultra-deep gold mines [20,21,22,23]. Research in this field was already making significant advances around the world. In the 1950s, researchers succeeded in developing trapped miner locator prototypes for deep underground mines [24,25,26,27,28,29,30,31,32,33,34]. This was followed by continuous trials and tests of their prototypes, some of which were successful and others unsuccessful. Further research and modifications were continuously made to improve these systems. It was in the 1970s that some USBM-sponsored research made some significant advancements [35,36,37,38]. This research has since been transferred to the National Institute of Occupational Safety and Health (NIOSH) at the Centers for Disease Control and Prevention (CDC) in the United States of America. But, some work on this topic is also currently being done in other countries such as China [39]. In 2012, Yenchek et al. [40] provided a status report on field test findings from several prototypes developed through NIOSH-sponsored contractual research projects. In the 2020s, more research and experiments are still being conducted on understanding the wireless channel and electromagnetic environment as the two primary factors affecting the performance of the TTE communication systems [41, 42]. While this research has been based on long-range electromagnetic transmission, other researchers have investigated the application of this theory in short-range detection systems. The short-range locator systems were required to detect miners trapped between 30 and 60 m behind broken or solid rock [43,44,45,46,47]. However, the priority was still on developing a long-range system for the deep mines. Table 2 shows how these systems have evolved since the 1970s.
Over the years, it became clear that the success of the TTE systems requires an optimal balance between range and data rates. Hence, further investigations went into understanding and modelling of rock properties, optimizing antenna magnetic induction, and antenna design transmission efficiencies [66,67,68,69]. Some studies have attempted to design medium frequency (MF) TTE systems with reduced-size antennas [70]. Although the TTE communication systems have existed since the 1900s, they became even more critical in 2006 when a series of three accidents in the United States of America resulted in 19 fatalities related to miners trapped underground within a space of 5 months [71]. This necessitated the promulgation of the Mine Improvement and New Emergency Response (MINER) Act of 2006 [72]. This Act required underground mines to implement a tracking and a post-accident communication system. This led to several researchers joining the journey to identify a fit-for-purpose trapped miner locator systems [73,74,75,76,77]. The TTE communication systems stood a good chance of satisfying the post-accident operational requirement due to their better survivability in comparison to the infrastructure-intensive tracking systems [78]. Prototypes were developed and led to the commercialization of such systems around the world [79,80,81,82]. The use of the TTE electromagnetic wave communication systems grew into other sectors with applications such as the detection of buried objects, boreholes, abandoned mines and illegal tunnels, geological features, voids, resource exploration, lithological mapping, geotechnical evaluation, and assessment of the rock mass response to mining [83,84,85,86,87,88,89].
3 Magnetic Inductive TTE Communication System
The magnetic inductive TTE communication system makes use of magnetic fields generated by a transmitting loop antenna and received on the other side by a receiving antenna. This allows the conveyance of information through the earth strata which acts as the medium of transmission, establishing a communication link. The magnetic inductive system achieves optimal transmission at minimal rock conductivity. This system can achieve the transmission of real-time voice at 2500 bps, voice messaging at 500 bps, text and data at 100 bps, and text-only at 10 bps at 1 keystroke per second [90]. Field tests have shown that these data transfer rates can be achieved to a depth of up to 600 m and horizontal distance of up to 1500 m at less than 3 to 8 kHz frequency bandwidth [70, 91]. The transmission of the magnetic wave requires a vertical (surface-underground) or horizontal (in-mine point-to-point) coupling of the transmitter and the receiver, as shown in Fig. 3.

a Vertical and (b) horizontal coupling of loop antennas [90]
Electromagnetic waves can be transmitted as far as 1000 m and more into the ground with the right antenna design and transmitter power [92]. This finding was based on a demonstration of linear antenna configuration as long as 5 km deployed on the surface. This gave an indication that greater depths and clearer bidirectional communication can be reached with proper antenna design and optimizations. In free space, LF wavelengths can stretch from 70 to 3200 km at a frequency range between 72 and 4000 Hz [93]. The extent of the wavelengths causes the efficiencies of the antennas to drop significantly. This can result in only a small fraction of the transmitter power being radiated. The efficiency of an antenna is given by the ratio of the radiated power to the total input power. The low radiation efficiency of electrically short antennas is due to their shorter loop length and smaller effective aperture. This can be easily solved by adding coils to the loop to increase its electrical length and thereby improving its efficiency. The electrically short antennas have a high capacitive reactance and thus exhibit low radiation resistance. This makes impedance matching a challenge. Impedance matching is a critical function for maximizing power transfer and improving the overall efficiency of an antenna.
The transmission range of signals is directly proportional to the transmitter power of the antenna. But the transmitter power tends to deteriorate with distance and results in poor communication [94]. Theoretically, large antennas can provide clearer communication than smaller antennas. The larger antennas have the capability of bidirectional communication as they can both transmit and receive signals efficiently, whereas some smaller antennas are often only capable of receiving signals due to their low efficiency. While the high-powered antennas can achieve a longer range at higher bandwidth and data rates to establish clear communication, they are restricted by permissibility or IS requirements, especially in gassy underground mines that are prone to explosions and underground fires [90]. The large antennas are also restricted by their size, which is not practical for deployment in underground mines. For example, the typical height and width dimensions of underground mine tunnels range between 3 m by 3 m to 5 m by 5 m while the antennas can be in the range of hundreds of meters to kilometers. Moreover, the dimensions of stopes and gullies are much smaller. Due to the size constraints underground, electrically short antennas are suited for TTE communication systems. This is not the same for surface antennas which are not restricted by power and size and thus can be as large as required.
The magnetic inductive process heavily relies on the radiation efficiency of the antenna. An antenna can be described as a device used for the radiating or receiving of electromagnetic waves [95]. Different antenna designs and capabilities are available for different industrial communication applications. An ideal antenna is one with a smaller size but provides high performances. However, in practice, smaller antennas yield narrow bandwidth and low efficiencies [96]. The efficiency of the magnetic inductive system depends on the type of antenna, in terms of parameters such as the shape, size, and material [14]. For example, antenna material with low resistance can achieve a longer communication range. While transmitting antennas depend on the power efficiency, the receiving antennas do not but instead should be able to overcome electrical noises. This requires the level of the signal to exceed that of external or electrical noises. Research by Conti and Yewen [97] took into consideration different antenna sizes of 7.5 m, 15 m, and 25 m in diameter to assess their efficiencies. These antennas were trialled with different numbers of turns and different materials based on environmental and geological effects. The initial idea was to wrap the loops around pillars to cover sufficient diameter [8, 56]. This is because the magnetic moment of the transmitting antenna can be increased by increasing the loop diameter. The sufficiently large antennas were found to be also suitable for highly conductive ground because the conductivity of the ground increases the impedance of the inductor. In addition, an area with a high moisture content has a higher conductivity and thus requires a larger antenna to overcome high attenuation rates. Yan et al. [1] conducted a study to estimate the conductivity of the Earth’s overburden above coal mines using different electromagnetic wave propagation models.
3.1 Subsurface Magnetic Induction
Antenna design and optimization are a critical aspect of the performance of the magnetic induction systems [94]. Different designs and specifications of transmitters and receivers have been developed to improve subsurface magnetic induction [66, 98]. The transmission of the magnetic inductive signals is a function of the magnetic flux density that exists between coupled antennas. The magnetic fields are propagated along a north-to-south direction, forming a circular loop. The directional flow of the magnetic fields, as well as many other factors, is an essential part of the design considerations for the orientation of transmitting and receiving antennas. This is particularly complex for electrically small loop antenna design considerations [99]. The data is transmitted using magnetic fields which are produced by non-radiative coils rather than propagating waves [100, 101]. The antennas are fundamentally in the form of an electric and magnetic dipole. Magnetic flux can be described as a concentration of magnetic fields flowing through the loop antenna area, as illustrated in Fig. 4.

One of the critical considerations of this system is a good coupling or alignment between the surface and underground antennas [70]. The quality of communication begins to deteriorate with an increase in misalignment and can lead to no communication at some point. However, in the confined underground mines, perfect coupling of the surface and underground antennas is often a challenge. This can also be restricted by the inflexibility of underground mines to couple the antennas properly; the surface antenna should try to align with the fixed underground antenna.
3.2 Magnetic Flux Density
The magnetic fields of antennas are generated by electrons moving along the transmitter coil. Since the antennas are quasi-static, magnetic fields are generated by electric current flowing through the antenna in a closed loop, and magnetic moment is generated when the electric current is applied through a number of turns and the cross-section area. The moving electrons create current and a voltage difference is measured by the receiving antenna. The magnetic fields flow from one end to another in a closed loop, thereby establishing a communication link. The bandwidth and data rates of transmitted signals are characterized by the magnetic flux density passing through the antenna, the strength of the magnetic fields, the area of the antenna loop, and the angle of loop that the field lines are passing. This has an influence on the range and depends on the magnitude of the magnetic flux generated by the transmitting antenna [100]. Current is then injected by the transceiver unit into the loop and a magnetic flux induction is created. Magnetic flux density is proportional to the current that is flowing through the loop antenna.
A decrease in the magnetic flux density results in an exponential decrease in the range [100]. The generation of magnetic fields can be further affected by external noises and alternate-current (AC) harmonics from other electrical equipment within the area [102]. The magnetic flux density (\(B\)) of a loop wire (antenna) of length (\(l\)), with a number of turns (\(N\)), current (\(I\)), and material permeability (\(\mu\)) is given by Eq. (1).
According to Carreno et al. [101], the transmission of signals through the earth depends on the rock conductivity (σ) measured in ohms (Ω), permittivity (ϵ), and permeability (µ) for a given transmission or travelling time (\(t\)). Therefore, the magnetic field (\(H\)) can be calculated by the diffusion theory given by Eq. (2) rather than the wave theory given by Eq. (3) [14].
The attenuation of signals in a conductive medium is given by the skin depth, \(\delta\) (in meters), equation with the angular frequency (\(\omega\)) factor. In a good conductor, the skin depth has an exponential field decay (\(1/e\) or 8.7 dB per skin depth), and this has an influence on the attenuation of the electric and magnetic fields. In free space, there is no conductivity (\(\sigma = 0\)), and therefore, the skin depth is up to infinity (\(\delta = \infty\)), and the wavelength remains the same (\(\lambda = \lambda 0\)). At LF or with a good conductive medium, the conditions of the skin depth are defined by the relationship given in Eq. (4).
Therefore, the skin depth effect for LF or a good conductive medium is as given in Eq. (5).
The characteristics of the waveform can also be altered during signal propagation in the conductive medium. The wavelength and velocity of a signal propagating through the skin depth are given in Eqs. (6) and (7).
The frequency and velocity of the waves depend on the skin depth, so the wavelength is very much shorter than it would be in free space. For poor conductors or waves propagating at high frequency, the skin depth effect is as given in Eq. (8).
Therefore, for high frequency or a poor conductive medium of signal transmission, the skin depth is as given in Eq. (9).
The flow of electric currents through material is determined mainly by the conductivity or resistivity of the material [103]. Typical resistivity and conductivity values of different materials, including rock, have been obtained through physical measurements but can also be obtained through tests and simulations [104]. Resistivity (\(\rho\)), measured in ohm-meters (Ω.m), can be described as the measure or ability of a material to impede the flow of current or charges from one point to another. Conductivity (\(\sigma\)), measured in Siemens per meter (S/m), can be described as the ability of a material to allow the flow of current or charges between two points. The flow of current in rocks can be influenced by factors such as the type of rock and its physical properties and chemical composition, temperature and degree of mineralization, amount of fluids in the pores or moisture content, and pressure variations in different regions. The typical conductivity and resistivity values of different rocks are given in Fig. 5 [105,106,107,108,109,110,111,112]. The properties of the rock and in particular the presence of water in its pores increase the conductivity of the rock. An increase in temperature decreases conductivity while highly porous ground with a higher moisture content has a higher conductivity. Conductivity also increases with a decrease in humidity. Sedimentary rocks are better conductors than igneous rocks. Ideally, large antennas with high transmission power at LF range in a low conductivity medium can achieve long propagation distances and high bandwidth.

Relationship between conductivity and resistivity of different materials [105]
3.3 Skin Effect
The skin depth is inversely proportional to frequency (\(f\)), permeability (\(\mu\)), permittivity (\(\epsilon\)), and conductivity (\(\sigma\)), but it is directly proportional to the wavelength (\(\lambda\)) of the electromagnetic waves. The skin depth can be described as the distance over which the amplitude of an electromagnetic wave drops or decays to \(1/e\) or approximately 1/3. The skin depth effect refers to the distance a wave must travel before its amplitude has been exponentially decayed by a factor of 1/e. The skin depth is a function of the frequency of the electromagnetic waves and the rock properties. Therefore, the skin depth, \(\delta ,\) can be calculated from Eq. (10) with the known values of the ground conductivity or resistivity.
However, Eq. (10) is applicable only for LF or a good conductive medium and is an equivalent of Eq. (5). With resistivity (ρ), the skin depth can be calculated from Eq. (11) using known values of permeability at free space \(\left({\mu }_{0}= 4\pi x {10}^{-7}\right)\) and relative permeability \(\left({\mu }_{r}\right)\).
The skin depth can also be measured from log–log graphs based on the relationship between frequency and conductivity. It is an indication of the depth into the ground in which conduction can still occur. The skin depth formula can thus be used to predict the maximum distance that electric current can penetrate through the earth. For example, high-frequency electromagnetic waves in a high-conductivity medium will result in a shallow skin depth. Low-frequency electromagnetic waves in a high resistivity medium will result in a large skin depth. Therefore, the skin depth can be overcome by using a good conductor and reducing the frequency of the signals. The penetration depth of the electromagnetic waves in a conductive medium is inversely proportional to frequency (\(f\)), conductivity (\(\sigma\)), permeability (\(\mu\)), and permittivity (\(\epsilon\)). The skin depth is thus inversely proportional to the attenuation constant (\(\alpha\)) and can be calculated from Eq. (12).
The attenuation constant can be calculated from Eq. (13).
In highly conductive ground, the electromagnetic signals suffer from absorptive losses [113]. The electromagnetic waves in such a medium suffer signal strength losses due to the rapid dissipation of energy. Similarly, at high frequencies, the skin depth becomes shallower due to the higher attenuation rates. In a typical electric flow circuit, the resistivity (\(\rho\)) and conductivity (\(\sigma\)) of the ground can be calculated from the resistance (\(R\)), conductance (\(G\)), electric current in the wire (\(I\)), voltage of the wire (\(V\)), length of the conductor (\(L\)), and the cross-sectional area of the wire (\(A\)). The propagation of electromagnetic waves through rock can also be influenced by factors such as the rock’s electric properties permeability, permittivity, and conductivity. Zhang et al. [114] showed that the electrical conductivity of different coal rocks varies between 0.0001 and 0.1 S/m. For this reason, electromagnetic waves can be propagated for significant distances in low-conductivity rocks. Table 3 shows that dry limestone rock, with lower conductivity, can achieve better penetration depth than sandstone which has a higher conductivity.
Skin depth has an effect on the transmission of signals, and it differs for different types of materials such as metals, air, rock, and liquids [115,116,117]. Atmospheric noise is normally attenuated at a rate of 8.7 dB per skin depth [14]. The skin depth effect provides an indication of how deep the electromagnetic fields can propagate in a conductive medium [118]. The skin depth is therefore larger at low frequencies. The finite electrical conductivity of the earth can range from 0.1 mS/m for dry rock to 10 mS/m in wet ground [14]. This is a very low range which allows good propagation; for example, seawater is a good conductive medium and has a finite electrical conductivity of approximately 4 to 5 S/m. With these parameters, given an electrical conductivity of 1 mS/m at 100 kHz, the electrical attenuation can be calculated to 45 dB, which can be greater in a lower frequency range. The relationship of skin depth as a function of conductivity and frequency is defined by the diagram in Fig. 6.

Skin depth, frequency, and conductivity relation chart [14]
3.4 Transmission Zones
Most TTE communication systems are quasi-static or operate in the near field. The skin depth is a range-limiting factor introduced by the conductivity of the earth. However, the presence of the surface of the earth introduces additional effects on the propagating magnetic field [119]. Due to the earth or soil not being homogenous, it becomes difficult to predict the channel attenuation at any frequency with depth [101]. The behavior and strength of magnetic fields are distinguished by different field zones — the near-field, the transition, and the far-field, as can be seen in Fig. 7. Within the different field zones, the magnetic fields behave differently. The field zones are slightly different for a conductive medium such as the ground in TTE communication systems. These field zones are slightly modified into the quasi-static field, near field, transition, and far-field zones [14]. The currents and charges emitted from the antenna cause strong inductive and capacitance effects in the near-field zone. The magnetic fields are strongest very close to the antenna and begin to attenuate beyond this zone. The near-field zone, closest to the antenna, is characterized by its static dipole, which decays inversely to the cube law, while the far-field zone is predominantly characterized by radiation, and it decays inversely to the linear law.

Magnetic field zones for signal propagation in a vacuum or free space [101]
In general, magnetic induction systems are poor radiators and their communication is achieved through the non-radiative near-field zone [120]. However, these systems will experience high attenuation rates in the near-field zone of the coil due to the dominance of reactive fields [118]. In this zone, the electric and magnetic fields cannot efficiently radiate power but can store energy near the antenna. Electrically short antennas are highly effective in the near-field zone for magnetic inductive systems. The electrically short loop antennas are operated in resonance to maintain the efficiency of the system. However, this will cause a reduction in the communication bandwidth thus rendering them unsuitable for high data rates. Resonant antennas experience reduced reactance losses which increases power radiation. The electrically short loop antennas will thus have low radiation resistance and high reactance. The electrically short antennas are characterized by narrow bandwidth, and this makes them highly sensitive to any changes or deviations in frequency. Increasing the bandwidth will cause a decrease in the sensitivity or peak gain of the antenna, ultimately reducing the efficiency of the antenna. However, a higher sensitivity of an antenna is necessary for detecting weaker signals and narrow bandwidth communication. But the bandwidth can be increased at the cost sensitivity by detuning the antenna.
The near-field zone is followed by the transition zone. The magnetic field signals continue to attenuate further into the transition. This zone is located in between the near-field and far-field zones and is characterized by the behavior of these field zones and their distribution. The transition zone can also be regarded as an arbitrary zone where the fields begin to transition from reactive to radiative. It is worth noting the electric and magnetic fields exist independently of each other in the near-field zone. This means that one field type can dominate the other, or vice versa. However, the transition zone allows the electric fields and magnetic fields to reach a uniform wave pattern due to wave impedance as they travel through the rock. This zone is often not ideal for maximum radiation, and the efficiency of an electrically short antenna starts to deteriorate. Eventually, in the far field, the electric and magnetic fields reach each other and travel in a uniform wave pattern or as a plane wave. In this region, the fields are radiative, and power can be radiated away from the antenna efficiently. The near field is mostly responsible for the absorption of the electromagnetic waves into the transmission medium. Interferences of the transmitted waves may be encountered, and some of the waves may be deflected back to the source as a result. The far field is a critical zone for communication range. The far-field zone is characterized by a single type of polarization, whereas four types of polarization (vertical, horizontal, elliptical, and circular) are present at the near-field. The energy dissipated through the far-field zone is constant throughout. Electrically short antennas are not ideal for the far-field zone due to their low radiation efficiency and poor impedance matching.
The subdivision of the magnetic field zones is necessary for distinguishing electrical distances where the magnetic fields behave in different ways. This is necessary for understanding and determining the strength of the magnetic fields at a precise point. It can also be used to determine the range of signals. The reactive and radiating near-field zones are characterized by their relationships or interactions with the electromagnetic fields. Both the magnetic and electric fields remain in phase and their relationship is fixed in the far-field zone. Normal electromagnetic radiation therefore takes place in the far-field. The near-field region is normally the complicated part of magnetic field induction by antennas. On the other hand, the far-field region is dominated by both the electric and magnetic fields, which have electric dipole properties. The near field is characterized by a collection of dipoles; this is referred to as multipole-type fields. Closer to the transmission of the source, both electric and magnetic fields are significant, and their behavior depends on the spatial distribution of currents and charges. As you move away from the source, the magnetic field becomes more dominant compared to the electric field in the far-field region. The rule of thumb is that the near-field region extends up to approximately one wavelength from the transmission source and the far-field region at about two wavelengths. This rule of thumb applies to the transition between near field and far field. However, the distances are much longer in comparison to the systems when operating at HF. At LF, the wavelengths extend much longer compared to HF electromagnetic waves. For example, at 1 kHz, the wavelength in free space is approximately 300 km. However, the rock is conductive and is much complex compared to free space conditions. The near-field region would extend up to approximately one wavelength from the source. Since the wavelengths are very long, the near-field region could extend for hundreds of kilometers from the transmission source. The far-field region would begin beyond about two wavelengths from the source. At LF, the far-field region extends for thousands of kilometers. Given the maximum linear dimensions of an antenna (\(D\)), the wavelength (\(\lambda\)), and the field region (\(R\)), each range is given by Eqs. (14–17).
-
Far-field region:
$$R \ge \frac{2{D}^{2}}{\lambda }$$(14) -
Near-field region:
$$R \le \frac{2{D}^{2}}{\lambda }$$(15) -
Reactive near-field region:
$$R \le 0.62\sqrt{\frac{{D}^{3}}{\lambda }}$$(16) -
Radiative near field:
$$0.62\sqrt{\frac{{D}^{3}}{\lambda }}\le R\le \frac{2{D}^{2}}{\lambda }$$(17)
3.5 Antenna Design Considerations
There are clear distinctions between transmitters and receiver requirements [121]. Transmitters strive to generate the greatest magnetic moment, while receivers strive to generate the greatest open-circuit voltage. Electrically small loop antennas have been preferred for underground communications due to their low power, small size, lightweight, and portability, although they have poor efficiencies. A loop antenna can be described as a coil carrying radio frequency current with a circumference less than 1/10 of its operating wavelength. Unlike large antennas, which are resonant due to high radiation efficiency, the electrically short loop antennas are less resonant. The efficiency of an antenna lies in its capability to convert electromagnetic waves into voltage and current so that it flows in a circuit and converts voltage and current into electromagnetic waves to be transmittable through media. The antennas are also required to detect and pick up electromagnetic waves propagating through media or in space. The loop antennas of the TTE communication systems can be based on magnetic or electric dipole transmission. Multiple antennas can be considered to manage the relationships between the magnetic field strength, range, and power [122]. The electric-based antennas are made of metallic rods or metallic plates, while the magnetic-based antennas are normally constructed of a loop of wires. The properties of these antennas have a significant influence on the amount of voltage that can be induced. The number of turns, the area of the receiving loop, and the angle between the magnetic field and the loop axis are some of the main factors that can be used to determine the amount of induced voltage. The range of the magnetic inductive systems is a function of the antenna’s transmitter input power [123].
3.5.1 Transmitter Power
Transmitter power is necessary for generating adequate signal strength and range. A larger loop antenna requires an increased transmitter input power in order to increase the range and data rates. However, underground mines can be gassy, and this places permissibility limitations on the allowable input power. For electrically short loop antennas, a significant amount of the input power is dissipated as heat due to the low radiation resistance. Magnetic fields in TTE communications are preferred over electric fields due to the fact that the earth does not only attenuate magnetic fields, but also changes the magnetic field in a lesser amount than it changes the electric field.
3.5.2 Antenna Size
The size of the antenna is limited not only by the power, but also by the confined spaces of underground workings. The size of the antenna is based on mass, diameter of loop, and its total length. The size of an electrically short antenna is not of a major concern at lower frequencies, which occurs in near-field region due to the much smaller wavelength. This enables the efficiency of the transmitter coil to be less of a concern in the design and optimization of antennas. But larger diameter antennas have a lower resistance than smaller diameter antennas. The mass of an antenna is increased by an increase in the diameter of the loop wire or the number of turns (\(N\)). Larger-diameter loop wires will experience lower resistance than thin wires due to their larger area.
3.5.3 Number of Turns (\({\varvec{N}}\))
One of the common design parameters of electrically short loop antennas is the number of turns in the coil. The magnetic moment (\(m\)) of an antenna can be improved by increasing the number of turns. An increase in the number of turns of the loop antenna increases the resistance of the antenna due to the increased length of the loop. But also, an increase in resistance can be due to the reduced cross-sectional area (\(A\)) of the thin wires as a result of the increased number of turns. Although an increase in the number of turns increases resistance, it increases the magnetic moment, which increases the strength of the generated magnetic field. The magnetic moment of an antenna is therefore due to the number of turns, the area of the loop, and the current (\(I\)) flowing in the loop, given by Eq. (18).
But the current flowing through the electrically short antennas is limited for practical amplifiers. One of the advantages of increasing the number of turns is that the magnetic field strength can be increased without the need to increase the current. Similarly, the inductance (\(L\)) of a loop antenna and its radiation resistance (\({R}_{r}\)) are directly proportional to the square of the number of turns (\({N}^{2}\)), given by Eqs. (19) and (20).
An increase in inductance can help improve transmitter or receiver impedance matching while an increase in radiation resistance increases radiation power efficiency. When the number of turns is increased, the length of the loop is essentially increased, and therefore, its inductance increases. This will ultimately improve the radiation resistance and magnetic moment of the loop antenna. The increase in inductance due to the number of turns is given by Eq. (21). This can affect the resonant frequency and thus cause an impedance to the loop antenna.
where.
\({\mu }_{o}\), permeability of free space;
\({\mu }_{r}\), permeability of the;
\(l\), length of the loop (m).
3.5.4 Antenna Array
One of the recently introduced methods of optimizing antenna efficiency is an antenna array, such as the multiple-input multiple-output system (MIMO) in which multiple transmitters and receivers of multiple signals on the same frequency are used [120]. This configuration is used to improve channel capacity, which ultimately increases data rates and communication link reliability, especially in challenged environments, due to their multiple propagation paths. Typically, 2 × 2, 3 × 3, and sometimes 4 × 4 arrays are used and can achieve maximum data rate capacity. Although this method is seen as the future of wireless communication systems, it may be difficult to implement in underground mines due to the limited space. A typical magnetic inductive circuit of a MIMO system is illustrated in Fig. 8.

Magnetic inductive communication circuit in a MIMO system [120]
The efficiency of the transmitter can be calculated from Eq. (22).
And, the efficiency of the receiver is given by Eq. (23).
where.
\({L}_{1} and {L}_{2}\), respective length of the tow coils (m);
\({R}_{s}\), source resistance (Ω);
\({R}_{load}\), load resistance (Ω);
\({R}_{ind\text{1,2}}\), respective inductance resistance (Ω).
3.5.5 Quality Factor (\({\varvec{Q}}\))
The \(Q\)-factor is an important aspect of the design of electrically short loop antennas as it can affect bandwidth. This improves the radiation efficiency of the antenna. Although the efficiency of the transmitter is not a major concern at low frequencies or electrically short loop antennas, the \(Q\)-factor becomes the most important aspect for improving range and bandwidth [120]. Increasing the \(Q\)-factor of a resonant loop antenna will reduce the bandwidth. The \(Q\)-factor of tuned antennas is typically proportional to bandwidth, but it is inversely proportional to bandwidth at high values [124, 125]. This allows the \(Q\)-factor to be used as an indicator of the bandwidth impedance and for providing insights into the design of antennas [126]. The \(Q\)-factor can be reduced by detuning the antenna. However, power losses can occur due to mismatching of the antenna and receiver impedance. The \(Q\)-factor, with given permeability (\({\omega }_{o})\) for the transmitter and receiver, can be calculated using Eqs. (24) and (25).
Q-factor of a transmitting antenna:
Q-factor of a receiving antenna:
3.5.6 Antenna Shape
The shape of antennas was also found to have an effect on the performance of magnetic inductive loop antennas [14]. Electrically small loop antennas can be designed in various shapes including circular, square, triangular, ellipse, rectangular, or hexagonal. The shape of the antenna determines the distribution of current within the loop and the radiation resistance. The circular-shaped loop antennas, as well as helical, have been shown to perform better than the other shapes. The efficiency of circular loop antennas is due to the impedance matching and higher radiation resistance. Fujita and Shirai [127] also showed that spherical antennas are more efficient than linear antennas. However, various other parameters can also affect the performance of an antenna based on its shape. For instance, relatively smaller diameter loop antennas have the same performance regardless of their shape.
3.5.7 Antenna Material
Different types of materials can be used to construct loop antennas, and this can have an influence on the performance of the antenna [14]. The type of material is critical for the antenna’s efficiency in converting electrical energy into electromagnetic waves and energy storage capacity. Materials such as copper and aluminum are often used due to their cost-effectiveness and reactiveness characteristics. Although aluminum is better than copper, both can be suitable for HF. However, for quasi-static antennas, dielectric materials are better suited. This is because the dielectric materials have a lower conductivity, and this can affect their transmission efficiencies. But in general, copper is a better conductor of electric current while aluminum can be preferred due to its lower density. An aluminum antenna can produce 3-dB field strength for the same mass and power dissipation as copper. But due to being highly conductive, signal losses are minimal. This shows that the field strength does not depend only on the power dissipated by the antenna. At this point, there is no clear distinction for the specific material used in transmitters and receivers.
3.5.8 Link Path Configuration
Communication direction can be downlinked (surface-to-underground) or uplinked (underground-to-surface), or both [14]. The uplink communication is usually more difficult to establish due to the confined space of underground mines, which limits the size of the antenna as well as the transmission power. The uplink and downlink techniques have an influence on the range and bandwidth, depending on the skin depth effects. The skin depth effect has a significant influence on both the uplink and downlink communication directions [14, 15, 101]. The surface and underground antenna should be able to act as both a receiver and a transmitter. Vertically coupled antennas have achieved better performances than other alignment configurations [70]. Some of the alignment configurations cannot efficiently radiate magnetic induction between the transmitter and the receiver. There are various types of communication alignments that can be established for communication on the surface, underground, or between the surface and underground loop antennas.
3.5.9 Air-Core Versus Ferrite-Core or Iron-Core Antenna
The design of an antenna could be of an air-core, iron-core, or ferrite-core solenoid [14]. The high-permeability core material can improve the efficiency of an antenna by concentrating the magnetic flux. The air-core antennas are normally tuned for HF, the iron-core are tuned for LF, and the ferrite-core antennas are tuned for both LF and HF. Ferrite-core solenoids are mostly oxides than they are metallic, and this enables better efficiencies due to increased magnetic flux and magnetic fields. The ferrite-core and iron-core antennas are easier to magnetize due to their higher magnetic permeability which makes them better suited for receiving electromagnetic waves. The iron-core and ferrite-core materials have a higher efficiency of the concentration of magnetic flux which allows the receiver antenna to absorb electromagnetic waves much easier. The iron material increases the inductance of an antenna for efficient reception of electromagnetic waves. The ferrite-core antennas have a higher \(Q\)-factor than iron-core antennas but have lower transmission efficiency when tuned for HF. When tuned at HF, the iron-core antennas tend to experience higher magnetic losses and thus reach saturation quicker, but the ferrite-core antennas experience less losses and thus can resist saturation. Both iron-core and ferrite-core antennas reduce the effects of electrical noises and other external interferences due to their capability of frequency selectivity. For example [14], a ferrite-core antenna with a length of 200 mm and a diameter of 24 mm can produce a magnetic moment of 30 Am2 for a power dissipation of 20 W, while the same magnetic moment can be produced with a ferrite rod antenna 1.8 m long and 8 mm in diameter. However, with a core-shaped antenna, the magnetic moment is produced with a power consumption of 90 mW. With such low power, this antenna, at LF below 1 kHz, can be suitable for data communication but not voice. In addition, on a practicality perspective, the iron-core antennas would be larger and heavier than the ferrite-core antennas.
3.5.10 Tuned Versus Untuned Antenna
Antenna tuning can improve the efficiency of communication and the range. This can be achieved through various methods, such as tuning of the antennas [14]. This is based on the altering of the resonant frequency of the antenna to match a specific frequency for a specific application and matching the impedance of an antenna to its source. The use of resonant antennas can improve efficiency by tuning the antenna to the operating frequency. Antenna tuning is only necessary if the impedance of the antenna is not equal to the impedance of the source. Tuned antennas have a higher efficiency than untuned antennas. Tuned antennas have an increased radiation power which increases the reach range of communication. Untuned antennas are capable of transmitting wideband signals at a lesser efficiency than antennas tuned for transmitting. Antenna tuning can be arranged in different configurations, including parallel, parallel with the damping resistor, series with a damping resistor, and untuned with a damping resistor. According to Jelinek et al. [128], it is desirable for electrically short antennas to be tuned at specific frequencies, although this can be a high-cost requirement. In fact, electrically short antennas should be self-resonant or obtain external tuning from a network. The effects of resonant tuning of small antennas on the efficiency of radiation have been investigated [129,130,131,132,133]. In general, the electrically short antennas should resonate to cancel input reactance by matching their impedance to the resistive load. Resonant antennas can achieve close to 100% efficiency until their size has been reduced to below critical design values [132]. Different tuning techniques can be selected based on the communication range and bandwidth required. Untuned antennas are known to have a high impedance source, and this often results in high noise voltages.
3.5.11 Waveguide Effect
Another method of improving the received power and range of magnetic inductive TTE communication systems is the waveguide technique [134,135,136,137]. This technique, which is also referred to as a multihop relay system, was mainly developed to overcome large antenna size restrictions and dynamic channel conditions, especially for underground communication. The efficiency of this technique depends on factors such as the size of the coil, the number of turns in the coil, coil resistance, and frequency. The technique can consist of a number of resonant relay coils which are placed in series in between the transmitter and the receiver. The incorporation of relay coils can be implemented to improve range and capacity without increasing the transmitter power or receiver sensitivity [138]. Various types of multihop techniques have developed, making use of both fixed and unfixed stations. The use of relay coils is easier in free space such as in the air and underwater, than it is in the ground. Underwater, the coils can be well positioned, distributed, and perfectly orientated [139]. However, through the earth (overburden between surface and underground), the distribution, orientation, and positioning of relay coils is not possible or practical. Alternatively, the coils can be distributed along haulages for increased in-mine communication range in a horizontal orientation. This can be beneficial since the relay coils constitute cheaper and less complex infrastructure than actual antennas [138]. The use of relay coils can also be considered in multilevel mines.
3.5.12 Waveguide Modelling
The magnetic induction waveguide model is based on a time-varying electric signal in the transmitter coil. The transmitting coil generates a varying magnetic field around the transmitter [140]. The relay coils create a channel guide for the transmission of the magnetic fields towards the guided direction [141]. A similar setup can also be implemented on the receiver end. This waveguide technique has been a preferred method, especially with the relay coils being placed closer to establish even better coupling between the transmitter and the receiver. Apart from range and bandwidth, the magnetic induction coupling waveguide techniques can also improve channel reliability and omni-direction communication [142]. Furthermore, the transmission direction can be effectively rerouted using the relay coils [143]. For underground applications, this can allow one transmitter to service-level panels or sections. However, it may not always be possible to place the relay coils as close as possible all the time, especially for applications in challenging environments. In order to improve capacity, Mittu and Lenin [144] investigated the factors that can affect the magnetic induction waveguide:
-
The number of relay coils: The received power and communication range increase with an increase in the number of coils. The relay coils try to keep the transmission power constant from the transmitter to the receiver.
-
The radius of the coils used: Increasing the radius of the coils increases the received power. Mutual inductance is directly proportional to the radius of the coils. In underground mines, the radius of the coils will be limited by the dimensions of the haulages or excavations.
-
The number of turns in each coil: Increasing the number of turns resulted in an increase in the received power due to the mutual inductance between the coils.
-
Unequal spacing of the coils: Theoretically, equal spacing of the coils has better inductance. However, this is not practical in real-life applications. However, the experiments showed that equally and unequally spaced coils achieved the same received power and communication range.
-
Any damage on the coils: Surprisingly, experiments showed that damaged coils achieved higher received power than undamaged coils.
-
Metallic coil material: Metallic coils achieve a longer communication range than non-metallic coils. Experiments showed that cast iron was better than carbon steel in terms of received power, while the communication range remained the same.
4 Through-the-Rock (TTR) Signal Scanners
The TTR locator system can be described as a short-range version of the TTE electromagnetic waves system. The system makes use of IS low-battery powered, lightweight radio transmitters or active tags (worn by the trapped miners) and directional receivers or radio signal scanners (carried by the rescue teams). The signal scanners are used to search for signals emitted by active tags and can determine the direction and distance at which a person is trapped under or behind a fall of ground, or inaccessible areas and cavities such as ore-passes. These tags can be mounted on the safety belts or hard hats of miners. This system does not work only through rock, but also in open spaces. It can detect miners not only trapped behind rock, but also those trapped in curvatures and inside cavities such as ore passes. This system operates at a slightly higher frequency, ranging between 600 Hz and 60 MHz [34]. Within this frequency range, Webb et al. [63] found that this system could be optimal at 27 MHz. High attenuation was experienced at more than 40 MHz, while slightly larger antennas were required for frequencies below 10 MHz [63]. Due to the increased frequency, the system was developed for short-range detection, between 30 and 60 m. Kononov [47] developed a system that could detect trapped miners at 30 m at 2.9 MHz spectrum. A system developed by Burnos et al. [46] was able to detect signals at 15 m at 5.6 MHz with an error of less than 1 m. In comparison to other systems, the TTR system is seen as an economical, practical, and backup system where all other means of locating the trapped miners have failed. Although the long-range systems were of priority, the TTR systems had some advantages in terms of ease of use and deployment.
5 Electrode-Based TTE Communication System
The electrode-based (or linear) TTE system is based on injecting an AC current into the ground [145,146,147,148,149,150]. Typically, an AC current higher than 1 A (A) can be injected into the ground for significant distances to transmit information [151]. The current-based signal is injected and transmitted using a pair of electrodes between the surface and underground and/or between two points on the surface or underground. Current flux is generated by a pair of electrodes inserted into the ground [152]. TTE communication systems are able to operate satisfactorily without line-of-sight between the two points of interest. One of the findings was that a shorter distance can be well covered when the radio waves penetrate the ground at higher frequencies. Unlike the magnetic inductive TTE systems, the electrode-based system requires good conductive ground for optimal range and bandwidth. However, signal losses can still be experienced and increase as the frequency of the signals increases. The injected current signals begin to replicate during interactions with the surroundings, and the replicas take multiple paths and directions. However, the replicas have a reduced signal strength. Due to the non-uniformity of the ground, multipath effects such as refraction, reflection, and deflection of the current flux can occur due to the layering of the earth with different strata in the heterogeneous ground. The refraction effect changes the distribution and magnitude of the current in the ground. Some of the replicas of the signals are still able to reach the receivers after the different delays encountered with adequate signal strength. These delays are time dispersion and can be quantified by the delay of the spread of replicas. The replicas then arrive at the receiver from different directions (angular dispersion quantified by angular spread). If the replicated signals or one of the transmitters is shifted, rapid changes in the phase relationship between multipath components can cause the signals to fade [153]. The flow of current in uniform ground is consistent but it will be refracted in layered ground of varying resistivity, as shown in Fig. 9.

Change in the propagation of electric current in uniform and layered ground and change in the resistivity due to the refraction of electric current through the layered ground [153]
The current injected into the ground is received as a voltage difference. The current can be injected from the surface to underground or vice versa. The electrodes are linked by lines of current. A receiver with high input impedance detects the voltage difference between its electrodes connected to the receiver as signals. The separation distance of the electrodes is an important factor as it can result in a larger voltage variation. The propagation of the AC currents is also highly dependent on the conductivity and resistance (or impedance) of the ground. Ground electrode impedance is dependent on several factors, and this plays a role in the reach depth and quality of the signals. For example, when the ground impedance is high, a small current can be injected into the earth, thereby resulting in a shorter communication range. Figure 10 shows that the current injected tends to penetrate more deeply (vertically) into the ground than sideways (horizontally) [154].

Spread of electric current injected through electrodes [154]
Based on the possible flow directions of current in the rock, one of the key factors was to understand and establish the influence of the geometric design in terms of the array and spacing of electrodes in the ground [155,156,157]. This is also dependent on the source and amount of the discharged electric current. The amount of current that can be injected into the ground is determined by the contact impedance of the electrodes for a given voltage [158]. This led to the idea that the electrode-based technique could be more efficient than the magnetic inductive coupling technique. However, the electrode-based technique may encounter large variations in the range of load impedance between its electrodes. For example, an earth impedance of more than 100 Ω between electrodes reduces the communication range [159], and an earth impedance of 1000 Ω is suitable for frequencies larger than 100 kHz [158]. The total impedance of electrode-based TTE communication systems has three components: (1) the wire impedance (Zw), (2) the impedance of the contact between the electrodes, and (3) the earth (Zc) and the impedance of the earth between the electrodes (Ze) [147, 148, 160, 161]. Total earth impedance affecting the TTE communications system is calculated using Eq. (26) as illustrated in Fig. 11.

Total impedance schematic diagram including transmission impedance and transmitting unit of TTE current injection into the earth through electrodes [159]
5.1 The Wire Impedance
The wire impedance (Zw) is the measure of how much current can flow between two points with a specific type of material. It is linked to the wires that connect the electrodes to each other and to the systems. These wires are normally made of copper, which is known to be a good conductor, and they are between 20 and 50 m in length [148]. Although silver is the best conductor of electricity, copper is often preferred due to its cost-effectiveness [162]. These wires usually have an inner diameter ranging between 0.8 and 1.0 mm [147]. The impedance due to the wires between the electrodes as an inductive-resistive series model was studied by Bataller et al. [148]. Hada and Kunieda [163] conducted an analysis of the wire impedance of different materials in view of the fact that an improved wire impedance is characterized by a thin, shorter, and coated material. The total impedance of the wire is increased due to a winding-dependent inductive component if the wire is coiled in a cable spool.
A capacitive coupling between the windings may also occur. Therefore, most of the wires are uncoiled, although a small fraction may be coiled. According to Bataller et al. [147, 148], the wires that connect the system and the electrodes have a DC resistance that ranges between 0.02 and 0.33 ohms per meter. This resistance increases significantly at high frequencies as a result of the skin effect on the conductor. Various models have been developed for wire impedance and most of them considered wire impedance as an inductive-resistive series model in the VLF to LF range [148, 164, 165]. The Extended 1 model was favored by Bataller et al. [148] due to its simplicity as compared with the models developed by the other authors. Another common model focused on the effects of and differences between totally coiled and partially coiled impedances of the wires. The Extended 1, totally coiled, and partially coiled models are described by Eqs. (27)–(29) for both low- and high-frequency components.
-
Extended 1: Low frequency
$${R}_{c}= \frac{\rho l}{\pi {a}^{2}}$$(27) -
Extended 1: High frequency
$${R}_{c}= \frac{pl}{\pi {a}^{2}}(\frac{a}{\delta })$$(28) -
Totally and partially coiled: Low frequency
$${R}_{c}= \frac{\rho l}{\pi {a}^{2}}$$(29)
where.
\(a\), wire radius (m);
\(l\), length of the electrode (m);
\(\rho\), conductivity of the wire (S/m);
\(d\), diameter of the wire (m);
\(\delta\), skin depth (m).
5.2 Earth Impedance
The earth impedance (\(Ze\)), also known as the ground impedance, refers to the impedance of the portion of the earth that is situated between the electrodes. Metals have proved to be good conductors of electric current in comparison to other media. However, the Earth’s soil and rock have also been found to be potential conductors of electric current [166,167,168]. Rock and soil are typically classified as semi-conductors whereas materials such as glass, plastic, and rubber are classified as insulators with no possible conduction of current. Insulators, also known as poor conductors, do not allow electric charges to flow through them. These materials have high resistance properties which impede the flow of electric current. But the conductivity of soil and rock is lower than that of metals but higher than that of insulators. One of the disadvantages of earth conductivity is that the flow of electric charges is uncontrollable in comparison with the unidirectional flow of current in wires. Among other factors, the value of the earth impedance depends on the total gap distance between the electrodes, the conductivity properties of the earth, and the optimum frequency [147]. The conductivity of the earth is a complex parameter that must be matched or overcome by the operating frequency of the system. This is to ensure an efficient transmission of current through the earth. The current injected into the earth follows three transmission mechanisms: (1) ohmic (materials with free electrons), (2) electrolytic (ionic conduction), and (3) dielectric conduction (electric field polarization) transmission mechanisms [169]. Furthermore, the conduction of current into the ground follows two paths, namely the polarisable and the non-polarisable. The non-polarisable path comprises electrolytic conduction, which is associated with free ions dissolved in water. Electrolytic conduction is also associated with the ions that flow from the metallic components of certain structures. The polarisable path has two main components, i.e., a membrane and electrode polarization [170]. As a result of polarization, the conductivity of the earth varies with frequency.
Similar to the wire impedance, various attempts have been made to develop models to simulate the earth impedance [171]. Most of these models take into consideration a complex resistivity, which includes the earth’s permittivity. The resistivity of the earth involves the electrolytic path. Bataller et al. [147, 148] focused on analyzing the earth’s impedance for geophysical applications by concentrating on the resistivity of the ground. The variation in the resistivity of the ground with a change in depth can be determined using electrical, magnetic, or electromagnetic methods. Water is contained in the pores of the rock mass and can also enhance the conduction of electric current. The properties and conditions of the soil must be well understood in order to determine an optimal design of the electrode-based system. The resistivity of the soil can be measured based on its particular properties. The Wenner and Schlumberger-Palmer methods have been developed and used to measure and interpret the resistivity of soil, but also to design grounding systems [172]. These formulas are an important part of electrode-based communication systems since the ground is already a poor conductor. The Wenner has often been used with a reasonable degree of accuracy [173] in Fig. 12. This method is based on the basis of the current (\(I\)) − voltage (\(V\)) − resistance (\(R\)) formula. This method requires the resistance of the soil to be measured first − R (Ω). The resistance can be determined by using measuring devices or it can be calculated. This formula works when the current and voltage are known.

Calculating soil resistivity using the four-point method [160]
With the Wenner or four-point method, consider an electrode configuration with four rods at equidistant intervals (\(a\)) in a straight line and known current. The resistance (\(R\)) of the soil or ground can be calculated using Eq. (30).
And, the soil resistivity, \(\rho\) (\(\Omega .m\)), can be calculated using Eq. (31).
where.
\(a\), distance between the rods (m);
\(R\), measured resistance (\(\Omega\).m) − measured from resistance tester;
\(L\), length of each rod buried in the soil (m).
From the Eqs. (32) and (33), if \(s\)> 20(\(L\)), then:
However, the rods may not always be equally spaced from each other. In this case, the Wenner method cannot be used. This necessitates the use of the Schlumberger-Palmer method which is based on the arrangement of rods that are not equidistant [174]. In this situation, Eqs. (34) and (35) can be used to calculate the resistivity of the soil between rods that are separated by distance \(c\) and distance \(d\):
5.3 Electrode Contact Impedance
The electrode contact impedance (\(Zc\)) can be described as the measure of the amount of electric current that can be injected into the ground at a given voltage. The wire impedance and impedance of the earth between the electrodes are often neglected when improving the overall impedance of the electrode system. The impedance of these components is usually very low and is seldom considered when computing total impedance on a larger scale. Furthermore, the impact of these impedances cannot necessarily be changed in attempts to improve the total impedance. The electrode contact impedance becomes the impedance of paramount interest and the focus for reducing overall impedance. This impedance is mainly concerned with the point of contact between the electrodes and the ground. The electrode contact (ground rod) impedance with two rods (assuming a single rod for each electrode) can be calculated using Eq. (36) (Damiano et al. [15]). This formula disregards the frequency of the signals.
where.
\(L\), length of rod in the ground (m);
\(a\), separation distance between the two rods (m);
\(r\), radius of each rod (m);
\(\sigma\), conductivity of the ground (S/m).
The electrode contact impedance depends on factors such as the type of electrode used (material, form, and size), the total number of electrodes used, the conductivity and electrical properties of the surrounding ground, the electrode’s depth of penetration into the ground, and the choice of transmission frequency. The electrode impedance has three main components: (1) the resistance of the conductor that forms the electrode, (2) the electro-chemical interface between the electrode and the earth, and (3) the contact surface between the electrode and the earth [148]. The portion of the earth immediately surrounding the electrode for a short distance is considered for the electrode contact impedance because it accounts for the highest resistance. The electrode contact impedance is assumed to remain constant beyond the immediate distance (\(x\)) from the electrode contact point, as illustrated in Fig. 13.

Considerable resistance portion of the earth surrounding the electrode [148]
Apart from altering the length and diameter of the electrodes, using multiple rods was also investigated as an alternative technique for reducing earth resistance. These rods must be placed in certain configurations and spacings apart in order to achieve the desired conduction of electric current. The impedance between electrodes can be reduced by simply adding another rod for each electrode [159]. This method is believed to be a feasible and efficient way of reducing earth electrode impedance. Additional rods will increase the amount of current injected into the earth, thereby increasing the reach depth of communication. Two rods that are well spaced provide a parallel path which is of a similar configuration to two resistances that are in parallel. Sinchi-Sinchi et al. [175] derived formulae for calculating electrode impedance with different rod placement configurations. The electrode impedance (\({R}_{e}\)) can be calculated for various different scenarios as follows.
[1] For one vertical electrode, the impedance can be calculated using Eq. (37):
where.
\(\rho\), soil resistivity (\(\Omega\).m);
\({L}_{rod}\), length of rod buried in the soil (m);
\(d\), diameter of rod (m);
\(r\), radius of rod (m).
[2] For two rods in a straight line, Eq. (38) applies:
where.
\({R}_{m}\), mutual resistance between mesh and rods (Ω);
\({R}_{1}\), resistance to earth of the conductor wire (Ω);
\(h\) = burial depth of the conductor wire (m).
[3] For three rods in a straight line, Eq. (39) applies:
[4] For three rods in a triangular mesh configuration where the electrode rods are connected by a conductor wire buried in the soil, Eq. (40) applies:
[5] For six rods in a rectangular configuration where the electrode rods are connected by a conductor wire buried in the soil, Eq. (41) applies:
where.
\({L}_{c}\), total length of the conductors connecting the rods (m).
5.4 Techniques to Improve Impedance
Various methods have been investigated to improve impedance. Understanding the earth’s resistance and the various means of reducing ground impedance is important for optimizing the penetration of signals to greater depths. The current injected into the ground can penetrate to greater depths of the ground if these factors are properly designed, managed, and controlled. Better transmission of the electric current requires improvements in the wire, earth, and electrode contact impedances. Various methods of reducing earth resistance were tested for relevant fields such as at substations, in coastal oceans, and through seawater [176,177,178]. The techniques for reducing resistance have also been applied in their industries and fields of electric charge conduction, with applications in underwater navigation and communication, grounding or earthing systems for towers and buildings, lightning protection for structures, geophysical prospecting, and bioelectronics [179, 180]. Table 4 is a summary of the techniques that can be applied in order to improve the different types of impedances.
6 Trade-Off Between the Magnetic Inductive and the Electrode-Based Systems
There is a clear distinction between the magnetic inductive and the electrode-based systems. This is by the technical capabilities and functionalities of the systems, but also various other factors. Table 5 is a simple comparison of these systems. Further comparisons should be done by means of field tests and simulations to determine which of the two is the more efficient mechanism. For example, different factors can influence the selection choice between the two systems, particularly based on the properties of the rock in the area and mine geometries. Such work was conducted in [40], evaluating signal processing and noise cancellation techniques. Hence, the choice between these two systems requires an extensive trade-off study involving simulations and field experiments. These systems capitalize on their low frequencies to improve penetration range but with reduced data rates.
7 Through-the-Earth (TTE) Seismic Wave System
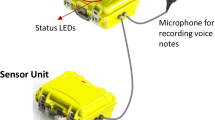
The TTE seismic wave system (Fig. 14) uses geophysical methods to detect trapped miners. This method, also referred to as a listening device, makes use of base stations consisting of iron plates and sledgehammers installed at regular intervals underground and of sensitive listening devices (geophones) placed on the surface. In the event of an accident where miners have become trapped underground, the trapped miner must reach a base station and start pounding against the wall to indicate their location. Distinct fingerprint seismic waves are generated by the pounding miner, transmitted through interconnected rock layers, and received by the geophones on the surface. The geophones should be able to overcome various types of external or electrical noises and other interferences from mining activities and other rock collapses [209]. The seismic waves are picked up as rhythmic vibrations at ULF between 28 Hz and 1 kHz [210]. The geophones must be strategically placed in an array on the surface in order to compute an accurate location of the pounding trapped miners [43]. At least three geophones are required for this purpose. The first geophone detects the radius of the source, the second geophone indicates two possible locations, and the third geophone confirms the common source of pounding, which indicates the actual location of the trapped miner. Each location in the mine being pounded has a unique seismic wave fingerprint, which indicates the location of the trapped miner. The base stations are continuously added and calibrated as the mine expands and advances. Adebisi [209] suggests that buried geophones provide more accurate locations as they can pick up twice the peak particle velocity (PPV) of the seismic waves. The seismic wave system has been extensively researched by researchers from the University of Utah [211].

a Array of seismic waves receivers on surface, (b) Miner pounding against mine wall to communicate location, and (c) propagation of seismic waves through the earth [211]
One of the biggest challenges of this system is the need for the trapped miner, who may be injured, to be able to find a sledgehammer and start pounding against the surrounding rock. Factors affecting detection include background noises and interferences, geological formations, the material used for pounding (e.g., crib block better than sledgehammer), off-set distance, and depth limitation. Initial field tests of the seismic waves system were conducted to investigate the effects of background noises and the effects of subarrays on the system [60]. Extensive field tests were conducted to determine optimum depth [212,213,214,215]. Findings showed that the system could detect seismic waves from miners pounding at 135 m underground [212] but failed to detect seismic waves at 240 m [213]. Subsequently, an improved version of the system managed to detect seismic waves at 300 m [214]. Further field tests were aimed at testing the design capability of the system to a depth of 600 m [214]. Adebisi [209] conducted field tests between 130 and 240 m. The relationship between depth and location error has been researched, and the error was found to be increasing with depth [216]. Another type of a unique seismic wave system was proposed, making use of a very small transmitter underground and a receiver on the surface [217]. The developed and tested prototype of this concept could transmit prearranged messages through rock using seismic waves rather than radio signals. These messages included information about the locations of the trapped miners and the surrounding environment. Although the system proved to be successful and promising, with transmissions of up to 271 m achieved, the concept does not seem to have gained much traction for further research since then.
8 Factors Affecting TTE Communication Systems
The TTE communication systems can be affected by several factors. Although the rock properties are a major influence, the design and deployment arrangements of the systems can also influence the transmission efficiency. The surface and underground components require special arrangements during deployment. Yan et al. [145] conducted an extensive evaluation of the factors that can affect the performance of the electrode-based system in Table 6. These factors are also noted by other researchers [76, 90].
9 Gaps and Challenges in the TTE Communication Systems and Future Research
The transmission of signals for large distances through rock is still the main challenge for the application of the TTE communication systems in underground mines. Although these systems have been extensively researched and advanced over the last decades, there are still some gaps and challenges affecting their performances. For example, significant research should still be focused on overcoming signal attenuation and pathloss effects. This can be linked to range and bandwidth or data rates which are the current major limitations of the systems. Trying to increase data rates and range at the same time is one of the biggest challenges. Range depends on factors such as the frequency of the signals, rock properties and input power. For example, an increase in the input power of an antenna can improve the performance of an antenna in terms of radiation efficiency and range. However, the input power has limitations due to permissibility requirements but also requires careful considerations of impedance matching. The properties of the rock such as the variations in electrical conductance, moisture content, and mineralogy can also affect the achievable range. Bandwidth and data rates can also be affected by the rock properties. These factors make it difficult to maintain a strong and clear signal over long distances into the ground. For lower bit rates at lower frequencies, an increased range is possible, but increasing the bit rates limits the range due to higher frequency. This suggests further studies to gain a thorough understanding of the rock properties and their influences on range and data rates. These studies can be used to establish more relationships between the antenna design considerations and the rock properties. Proper simulations and modelling of these factors can be applied to reduce signal attenuation and pathloss effects. This can help develop more accurate electromagnetic wave propagation models that incorporate factors such as signal attenuation, scattering, refraction, and reflection. If these parameters are well understood, the range and data rates can be improved.
Further research is suggested on strategies that can be used to improve transmission efficiencies, enhance signal penetration rate, and reduce pathloss. Relay coils and MIMO systems are examples of some of the techniques that have been developed to improve range and bandwidth simultaneously. But relay coils cannot be practically deployed and installed into the ground. The use of relay coils can be considered in multilevel mines. The relay coils can also solve issues related to power consumption and antenna size restrictions in the underground mines.
There is also a need for further research to develop more robust noise-cancellation algorithms and techniques. These techniques are required to minimize interferences and noises to improve range and achieve clear communication. This can also be essential for the selection of an optimal frequency band to overcome electrical noises and other external interferences. This can be further supplemented by SNR optimization and advanced signal processing (noise cancellation, filtering, shielding and error correction) techniques to detect and decode weak signals.
A significant amount of radiation efficiency of the magnetic inductive systems is lost in the air-to-earth interface due to the reflection and refraction of signals. Understanding this interface can help improve the penetration efficiency of the signals from the transmitter into the rock, whether electrodes or antenna. Certain rocks may be suitable for electrodes and other for electrically small loop antennas. The efficiency lost due to the air-to-earth interface can also be quantified.
This study provided a brief comparison between the magnetic inductive and the electrode-based systems. However, a comprehensive trade-off between these systems is suggested. This can be conducted through field experiments in areas of varying geological formations and depth. This study should focus not only on the technical parameters, but also factors such as regulatory requirements and compliance, costs, added health and safety risks, and environmental impact.
Antenna design and optimization are also critical factors of consideration for the magnetic inductive communication systems. Further research should still focus on designing and optimizing antennas with improved radiation and signal reception efficiencies with practical sizes suitable for underground mine deployment. This is particularly critical when considering the material, shape, and power consumptions. Antenna design optimization should also consider factors such as the choice of frequency, polarization, and radiation patterns. This can further address issues concerning the portability, mobility, and deployment of these systems. This will ultimately improve their accessibility and availability, especially during emergencies.
Furthermore, underground mines do not only require efficient antennas, but the antennas must also be robust and compact to withstand the harsh conditions of underground mines and remain operational post-accident. The antennas should also be easy to deploy underground. The TTE communication systems are believed to have a higher survivability compared to most communication systems. This is mainly due to the minimal infrastructure, but the hardware components of the systems can still be damaged during accidents. Further research is needed to explore the development of explosion-proof and rugged components to protect the systems against impacts from accidents such as rock falls and explosions. The TTE communication systems have predominantly been operated in isolation. There is an opportunity to potentially integrate the TTE communication systems with existing communication infrastructure and other mining systems and technologies. However, the existing infrastructure and systems operate at different frequencies which may not be interoperable with the TTE communication systems. An integration of the TTE communication systems with existing infrastructure and the primary tracking systems to function as a single system is part of ongoing research to scale up the coverage, availability, and accessibility of the TTE communication systems. The TTE communication systems can ultimately be real-time monitoring and automation systems.
10 Conclusion
This study reviewed the capabilities and limitations of the different types of TTE communication systems and their applications in underground mines. These systems have been extensively researched and trialled in their applications to establish wireless two-way communication between surface and underground, and for locating trapped miners post-accident. One of the biggest advantages of these systems is their non-reliance on backbone infrastructure where the earth strata become the medium of transmission. This makes the TTE systems to be better suited for post-accidents communication in comparison to the traditional primary tracking systems. These systems have evolved significantly over the last decades with many successes. However, further research and trials are still required and ongoing to further improve and modify these systems, particularly in terms of range and bandwidth. This is because the TTE systems are still faced with several shortcomings and challenges. Their shortcomings are driving future research on their efficiency, reliability, and practicality of deployment in underground mines. The influence of rock properties on the performances of these systems remains one of the biggest challenges to solve. New innovative antenna design and optimization solutions are still required to overcome these challenges and various other challenges identified in this study. Overall, with the necessary improvements and advancements, these systems are promising to be an integral part of the safety of underground mines and can play a critical role in saving survivors. This will reduce trapped miner fatalities and ultimately improve overall mine safety.
References
Yan L, Waynert J, Sunderman C (2014) Earth conductivity estimation from through-the-earth measurements of 94 coal mines using different electromagnetic models. Appl Comput Electromagn Soc J 29(10):755–762
Bandyopadhyay LK, Chaulya SK, Mishra PK (2010) Wireless communication in underground mines: RFID-based sensor networking. Springer, New York
Liu X, Xiong F, Xie Q, Yang X, Chen D, Wang S (2022) Research on the attenuation characteristics of high-frequency elastic waves in rock-like material. Materials 15(19):6604
Kudinov DS, Maykov OA, Kokhonkova EA, Romanov VV (2020) Theoretical grounds for the propagation of electromagnetic waves of low-frequency (URL) in low-resistivity rocks. IOP Conf Ser Mater Sci Eng 862(3):1–6
Eve A, Keys D, Lee F (1929) Penetration of rocks by electromagnetic waves. Nature 124:178–179
Smith-Rose RL, McPetrie JS (1931) The attenuation of ultra-short radio waves due to the resistance of the earth. Proc Phys Soc 43(5):592
Dokoupil S, Karpinský J, Kašpar M (1962) The attenuation of electromagnetic waves in rocks. Stud Geophys Geod 6:176–192
Fritsch V (1963) Propagation of radio frequency electromagnetic fields in geological conductors. J Res National Bureau Standards-D Radio Propag 67(2):161–178
Hjelmstad KE,Ackerson MA (1990) One-way fire warning alarm system for underground mines. Proceedings of the tenth WVU International Mining Electrotechnology Conference, pp 47–52. https://www.cdc.gov/niosh/mining/works/coversheet1372.html Accessed 15 May 2023
Wheeler H (1961) Radio wave propagation in the earth’s crust. J Res Natl Bur Stan D 65(2):189–195
Colburn CL, Bouton CM, Freeman HB (1922) Experiments in underground signalling with radio sets. Reports of Investigations Serial No: 2407, United States Department of the Interior, Bureau of Mineshttps://books.google.co.za/books?hl=en&lr=&id=fesZxtTuw1sC&oi=fnd&pg=PP3&dq=colburn+bouton+freeman+1922&ots=h8A_G0eDGm&sig=Z9-zhD3DaT1Wn4gRh_q_tDx4GeA#v=onepage&q=colburn%20bouton%20freeman%201922&f=false Accessed 19 March 2023
Jakosky JJ (1924) Radio as a method for underground communication in mines. Report of Investigations Serial No. 2599, United States Department of the Interior, Bureau of Mines.https://books.google.co.za/books?id=lnTeeJhG1YEC&printsec=frontcover&source=gbs_ge_summary_r&cad=0#v=onepage&q&f=false Accessed 19 March 2023
Jakosky JJ, Zellers DH (1924) Factors retarding transmission of radio signals underground, and some further experiments and conclusions. Reports of Investigations Serial No: 2651, United States Department of the Interior, Bureau of Mines. https://books.google.co.za/books?hl=en&lr=&id=3Z5oUY4MZEgC&oi=fnd&pg=PT2&dq=jakosky+1924&ots=GU9-luCfzj&sig=1ATssbvyHOYL2rZxSrBy-NEHoAg#v=onepage&q=jakosky%201924&f=false Accessed 19 March 2023
Gibson D (2003) Channel characterization and system design for sub-surface communication. Dissertation, University of Leeds
Pena Carreno JD, Barreto AN, Braga J (2019) Propagation loss and apparent conductivity models for through-the-earth communication in sedimentary soil. IET Microwaves Antennas Propag 13(9):1382–1388
Pena Carreno JD, De Barros Braga AJ (2019) Stochastic generation of subsurface profiles for realistic simulation of through-the-earth communication systems. Int J Antennas Propag 2019:1–10
Damiano NW, Yan L, Whisner B, Zhou C (2017) Simulation and measurement of through-the-earth, extremely low-frequency signals using copper-clad steel ground rods. IEEE Trans Ind Appl 53(5):5088–5095
Burrows C (1963) Radio communication within the earth’s crust. IEEE Trans Antennas Propag 11(3):311–317
Wadley TL (1949) Radio communication through rock in the Witwatersrand Mines. Council Sci Ind Res (South Africa), Telecomm Res Lab Rept ETR-4, August 1949, pp 179
Vermeulen DJ, Grad IEE, Blignaut PJ (1961) Underground radio communication and its application for use in mine emergencies. Trans South African Inst Electr Eng 52(4):94–105
Austin BA, Lambert GP (1985) Electromagnetic propagation underground with special reference to mining. Trans South African Inst Electr Eng 76(1):1–5
Austin B (1977) Radio communication in mines. Dissertation, University of the Witwatersrand
Austin BA (1990) Medium frequency body loop antenna for use underground. IEE Colloquium on Electrically Small Antennas, London, UK, p 3/1-3/5
Wait JR (1954) On anomalous propagation of radio waves in earth strata. Geophysics 19(2):342–343
Wait JR (1966) Some factors concerning electromagnetic wave propagation in the earth’s crust. Proc IEEE 54(8):1020–1025
Wait JR (1989) Electromagnetic and electrochemical response of geological conductors. Digest on Antennas and Propagation Society International Symposium Vol. 2. San Jose, CA, USA, p 1156
Roy A (1968) Continuation of electromagnetic fields—I. Geophysics 33(5):711–847
Watt AD, Mathews FS, Maxwell EL (1963) Some electrical characteristics of the earth’s crust. Proc IEEE 51(6):897–910
Bremmer H (1954) The extension of Sommerfeld’s formula for the propagation of radio waves over a flat earth, to different conductivities of the soil. Physica 20(1–6):441–460
Wait JR (1954) Theory of electromagnetic surface waves over geological conductors. Geofis Pura Appl 28:47–56
Smith-Rose RL (1947) Radio-wave propagation research in the Department of Scientific and Industrial Research during the years 1937–1946. J Inst Electr Eng-Part IIIA: Radiocommun 94(16):879–892
Wait JR, Campbell LL (1953) The fields of an electric dipole in a semi-infinite conducting medium. J Geophys Res 58(1):21–28
Wait JR, Spies KP (1971) Subsurface electromagnetic fields of a line source on a conducting half-space. Radio Sci 6(8–9):781–786
Wait J, Spies K (1971) Electromagnetic fields of a small loop buried in a stratified earth. IEEE Trans Antennas Propag 19(5):717–718
Lagace RL, Dobbie JM, Doerfler TE, Hawes WS, Spencer RH (1980) Detection of trapped miner electromagnetic signals above coal mines.https://stacks.cdc.gov/view/cdc/9041 Accessed 23 August 2023
Raab FH, Hansen PK (1981) Electromagnetic system for subsurface position measurement. Annual Meeting Industry Applications Society, Philadelphia, PA, USA, pp 111–118
Durkin J (1984) Electromagnetic detection of trapped miners. A report on 94 field tests using narrowband EM transmitters to locate trapped miners. IEEE Commun Mag 22(2):37–46
Pittman WE Jr, Church RH, McLendon JT (1985) Through-the-earth electromagnetic trapped miner location systems: a review. United States Bureau of Mines, Department of Interior, Open File Report: 127–85. https://stacks.cdc.gov/view/cdc/9144. Accessed 16 Aug 2023
Zhang G, Xu Z, Chen, Wen X (2021) OFDM signal design based on electrode-based through-the-earth communication. 20th International Conference on Ubiquitous Computing and Communications (IUCC/CIT/DSCI/SmartCNS). IEEE, pp 40–45
Yenchek MR, Homce GT, Damiano NW, Srednicki JR (2012) NIOSH-sponsored research in through-the-earth communications for mines: a status report. Centers for Disease Control and Prevention, Atlanta, GA. https://ieeexplore.ieee.org/document/6256773Accessed 15 August 2022
Zhou C, Damiano N (2021) Wireless channel and electromagnetic environments for through-the-earth (TTE) communications in an underground coal mine. IEEE Radio and Wireless Symposium (RWS), San Diego, CA, USA, pp 158–160
Zhou C, Damiano N (2021) Electromagnetic environments and wireless channels for through-the-earth (TTE) communications in an underground coal mine: modeling and measurements. Prog Electromagn Res M 103:91–101
Kumar A, Chaulya SK, Bandopadhyay LK (2003) Trapped miners detection, location and communication system. Minetech 24(6):1–3
Pittman WE (1984) Through-the-earth radio communications for trapped miners. Earth Sci History 3(2):164–168
Pronenko V, Dudkin F (2016) Electromagnetic system for detection and localization of miners caught in mine accidents. Geosci Instrum Methods Data Syst 5(2):561–566
Burnos P, Gajda J, Maj P (2010) Digital system for detection and location of miners trapped in hard coalmines – GLOP2. J Metrol Meas Syst 17(2):245–254
Kononov VA (1998) Develop a trapped miner location system and an adequate rescue strategy and associated technologies. GEN 502 Final Project Report, CSIR Division of Mining Technology, South Africa
Farstad AJ (1973) Performance of manpack electromagnetic location equipment in trapped miner location tests. Proceedings of Thru-the-Earth Electromagnetics, August 15–17. Colorado School of Mines, pp 62–72
Farstad AJ, Fisher C, Linfield RF (1973) EM location system prototype and communications station modification. United States Bureau of Mines, Department of Interior, Final report, Open file report 68–73, Contract H0232049. https://stacks.cdc.gov/view/cdc/8874. Accessed 23 Aug 2023
Olsen RG, Farstad AJ (1973) Electromagnetic direction finding experiments for location of trapped miners. IEEE Trans Geosci Electron 11(4):178–185
Geyer RG (1973) Theory and experiments relating to electromagnetic fields of buried sources with consequences to communication and location. Proceedings of Thru-the-Earth Electromagnetics, August 15–17. Colorado School of Mines, pp 20–33
Parkinson HE (1973) Objectives and constraints of through-the-earth electromagnetic communication systems. Proceedings of Thru-the-Earth Electromagnetics, August 15–17. Colorado School of Mines, pp 1–8
Geyer RG, Keller GV, Ohya T (1974) Research on the transmission of electromagnetic signals: between mine workings and the surface. United States Bureau of Mines, Department of Interior, Open file report 1974–61, Contract No. H0101691. https://stacks.cdc.gov/view/cdc/8838. Accessed 28 Aug 2023
Greenfield RJ, Stoyer CH (1976) Errors in the location of a buried electromagnetic source resulting from lateral changes in ground conductivity. IEEE Trans Geosci Electron 14(2):115–117
Geyer RG, Keller GV (1976) Constraints affecting through-the-earth electromagnetic signalling and location techniques. Radio Sci 11(4):323–342
Powell JA (1976) An electromagnetic system for detecting and locating trapped miners. Pittsburgh Mining and Safety Research Center, Pittsburgh, Pennsylvania, U.S.A., Report of Investigations (RI) 8159 – NTIS No. PB–258087. https://www.cdc.gov/niosh/mining/userfiles/works/pdfs/ri8159.pdf. Accessed 12 Sep 2023
Sacks KH (1977) Trapped-miner location and communication systems. Underground Mine Communications:(in Four Parts). Section-to-Place Commun, United States Bureau of Mines, Inform Circ 8745:31–43
Farstad AJ, Kehrman RF (1979) Electromagnetic location systems for metal/non metal mines. United States Bureau of Mines, Department of the Interior, Final Report, Contract No. J0166100. https://stacks.cdc.gov/view/cdc/9038. Accessed 15 Sep 2023
Lagace RL, Dobbie JM, Doerfler TE, Hawes WS, Spencer RH (1980) Detection of trapped miner electromagnetic signals above coal mines: final report. United States Bureau of Mines, Department of the Interior, Open-file report 1982–99, J0188037. https://stacks.cdc.gov/view/cdc/9041. Accessed 16 Sep 2023
Durkin J, Greenfield R (1981) Evaluation of the seismic system for locating trapped miners (Vol. 8567). United States Bureau of Mines, Department of the Interior, Report of Investigations RI/8567. https://stacks.cdc.gov/view/cdc/9627. Accessed 19 Sep 2023
Durkin J (1982) Performance evaluation of electromagnetic techniques for the location of trapped miners. United States Bureau of Mines, Department of the Interior, Report of Investigation 8711. https://www.cdc.gov/niosh/mining/userfiles/works/pdfs/ri8711.pdf. Accessed 23 Sep 2023
Hopkins III WG, Church RH, Webb WE (1983) Development of a phase difference of arrival technique for location of trapped miners. Tuscaloosa Research Center, United States Bureau of Mines, Department of the Interior, Open File Report 46–84. https://stacks.cdc.gov/view/cdc/9142. Accessed 26 Sep 2023
Webb WE, Church RH, Pittman WE Jr, Boyle JR Jr (1984) A short-range locator system for detecting trapped miners. United States Bureau of Mines, Department of the Interior, Report of Investigations 8844. https://www.cdc.gov/niosh/mining/userfiles/works/pdfs/ri8844.pdf. Accessed 27 Sep 2023
Durkin J (1984) Apparent earth conductivity over coal mines as estimated from through-the-earth electromagnetic transmission tests. United States Bureau of Mines, Department of the Interior, Report of Investigations 8869 NTIS PB84–213792PITT. https://www.cdc.gov/niosh/mining/works/coversheet451.html. Accessed 29 Sep 2023
Pittman WE, Church RH, McLendon JT (1985) Through-the-earth electromagnetic trapped miner location systems. a review. United States Bureau of Mines, Department of the Interior, Open File Report: 127–85. https://stacks.cdc.gov/view/cdc/9144. Accessed 3 Oct 2023
Durkin J (1997) Surface vertical magnetic field produced by a finite loop buried in an earth containing a thin conducting sheet. Radio Sci 32(1):19–23
Ayuso N, Cuchi JA, Lera F, Villarroel JL (2006) Through-the-earth magnetic field propagation: modelling and experimental validation. Proceedings of the 2006 IEEE Antennas and Propagation Society International Symposium. pp 680–683
Xu Y, Guo L, Xue W, Vladimir K, Qi J (2016) An optimal electric dipole antenna model and its field propagation. Int J Antennas Propag 2016:1–8
Yan L, Reyes M (2022) Magnetic field above stratified earth in magnetic loop through-the-earth wireless communications. Radio Sci 57(5):1–7
Fedosov DV, Kolesnikov AV (1862) Nikolaev AV (2021) Advanced MF antennas for underground communications. J Phys: Conf Ser 1:1–7
Centers for Disease Control and Prevention (2009) Underground coal mining disasters and fatalities --- United States, 1900—2006 https://www.cdc.gov/mmwr/preview/mmwrhtml/mm5751a3.htm Accesses 22 October 2022
Mine Health and Safety Administration (2006) Mine Improvement and New Emergency Response Act of 2006. United States Public Laws. https://arlweb.msha.gov/MinerAct/2006mineract.pdfAccesses 15 March 2023
Laliberté P (2009) Summary study of underground communications technologies. Final Project Report CANMET-MMSL. Mining and Mineral Sciences Laboratories, Natural Resources Canada, Sudbury, Ontario, Canada. http://www.wvminesafety.org/PDFs/UndergroundCommunicationsReport.pdfAccesses 13 February 2022
Schiffbauer WH, Mowrey GL (2006) Preliminary assessment of communication systems for underground mines for normal and emergency operations. National Institute for Occupation Safety and Health, Office of Mine Safety and Health. http://www.wvminesafety.org/PDFs/communications/Additional%20Documents/Prelim_Assessment_of_Communications.pdfAccessed 16 August 2022
Douglas AD (2014) Status of communication and tracking technologies in underground coal mines. Dissertation, University of Kentucky
Ngwenyama PL (2018) A critical investigation into missing persons in underground mines and related tracking technology. Dissertation, University of Pretoria
Shiffbauer WH, Mowrey GL, Brune JF (2006) Through-the-earth and other types of communication systems for underground coal miners for disaster and normal operations. National Institute for Occupational Safety and Health, Centers for Disease Control and Prevention. www.cdc.gov/NIOSH/mining/mineract/pdfs/commsystems.pdf Accessed 30 May 2023
Ngwenyama PL, Webber-Youngman RC (2023) The development of user requirements as a framework for the design and evaluation of a fit-for-purpose missing person locator system for underground mines. Min Metall Explor 40:2205–2225
Vital Alert (2023) Intrinsically safe system for TTE voice, text and data communication in below ground coal mining. https://vitalalert.com/product/canarycommis/ Accessed 16 November 2023
Mine Site Technologies (MST) Global (2023) Through-the-earth transmission. https://mstglobal.com/technology/network-infrastructure/ Accessed 18 November 2023
Lockheed Martin (2023) Lockheed Martin conducts successful in-mine test of its through-the-earth wireless communication system. https://news.lockheedmartin.com/2010-07-21-Lockheed-Martin-Conducts-Successful-In-Mine-Test-of-Its-Through-The-Earth-Wireless-Communication-System Accessed 17 November 2023
Advanced Automated Systems (AASYS) (2023) Kutta Radios. https://aasys.co.za/solutions/kutta-radios/ Accessed 19 November 2023
Sacks HK (1978) Electromagnetic technique for locating boreholes. United States Bureau of Mines, Department of the Interior, Report of Investigations 8302. https://www.cdc.gov/niosh/mining/works/coversheet11.html. Accessed 12 Oct 2023
Scott WR, Martin JS, Larison GD (2001) Experimental model for a seismic landmine detection system. IEEE Trans Geosci Remote Sens 39(6):1155–1164
Wang P, Li M, Yao W, Su C, Wang Y, Wang Q (2020) Detection of abandoned water-filled mine tunnels using the downhole transient electromagnetic method. Explor Geophys 51(6):667–682
Stolarczyk LG, Troublefield R, Battis J (2005) Detection of underground tunnels with a synchronized electromagnetic wave gradiometer. Proceedings of SPIE 5778 Sensors, and Command, Control, Communications, and Intelligence (C3I) Technologies for Homeland Security and Homeland Defense IV. Orlando, Florida, United States, pp 994–1001
Hatherly P (2013) Overview on the application of geophysics in coal mining. Int J Coal Geol 114:74–84
Cross JD (2014) Low-frequency electromagnetic fields for the detection of buried objects in the shallow sub-surface. Dissertation, University of Birmingham
Zheng FH, Di QY (2021) Propagation of ELF electromagnetic waves over a curved stratified ground and its application in geophysical prospecting. IEEE Access 9:145563–145572
Yenchek MR (2009) Through-the earth mine communication systems. National Institute for Occupational Safety and Health, Centers for Disease Control and Prevention https://www.cdc.gov/niosh/mining/UserFiles/workshops/commtrack2009/ThroughTheEarth-Yenchek.pdf Accessed 23 February 2023
Barkand TD, Damiano NW, Shumaker WA (2006) Through-the-earth, two-way, mine emergency, voice communication systems. Conference Record of the 2006 IEEE Industry Applications Conference Forty-First IAS Annual Meeting. Tampa, FL, USA, pp 955–958
Shaydurov GY, Kudinov DS, Kokhonkova EA, Shchitnikov AA (2016) Through-the-earth communication in underground mines by electromagnetic waves. 2016 International Siberian Conference on Control and Communications (SIBCON). Moscow, Russia, pp 1–6
The National Institute for Occupational Safety and Health (NIOSH) (2019) Advanced tutorial on wireless communication and electronic tracking: communication system performance. https://www.cdc.gov/niosh/mining/content/emergencymanagementandresponse/commtracking/advcommtrackingtutorial2.html Accessed 26 June 2023
Gangwar K, Chen GC-Y, Chan KK-M, Gangwar RK, Rambabu K (2021) Antenna system for communication in underground mining environment to ensure miners safety. IEEE Access 9:150162–150171
Shi Y, Xu J, Ye J (2023) Enhanced near-field radiation of acoustic-actuated antennas using embedded magnetoelectric composites. Compos Struct 314:1–9
Ralchenko M (2017) Modelling and optimizing through-the-earth radio transmissions. Dissertation, Carleton University
Conti RS, Yewen RG (1997) Evaluation of a signaling and warning system for underground mines. Report of investigations/1997 (No. PB-97–169593/XAB; NIOSH-RI-9641). National Inst. for Occupational Safety and Health, Pittsburgh, PA (United States). Pittsburgh Research Center. https://www.cdc.gov/niosh/mining/works/coversheet1301.html. Accessed 19 Oct 2023
Squires CC, Willink TJ (2009) The impact of vehicular antenna placement on polarization diversity. IEEE 70th Vehicular Technology Conference Fall. Anchorage, AK, USA, pp 1–5
Bolton T (2016) Optimal design of electrically-small loop antenna including surrounding medium effects. Dissertation, Georgia Institute of Technology
Zhang Z, Liu E, Zheng X, Jian Y, Wang D, Liu D (2014) Cooperative magnetic induction based through-the-earth communication. IEEE/CIC International Conference on Communications in China (ICCC). Shanghai, China, pp 653–657
Carreño J, Silva L, Neves S, Aguayo L, Braga AJ, Barreto AN, Garcia LU (2016) Through-the-earth (TTE) communications for underground mines. J Commun Inform Syst 31(1):164–176
Raab FH, Joughin IR (1995) Signal processing for through-the-earth radio communication. IEEE Trans Commun 43(12):2995–3003
McNeill JD (1980) Electromagnetic terrain conductivity measurement at low induction numbers. Technical Note TN-6, Geonics Limited, Mississauga, ON, 15phttps://geonics.com/pdfs/technicalnotes/tn6.pdf Accessed 19 July 2023
Shang S, Gao Q, Cui Y, Wang P, Zhang Z, Yuan Y, Yan W, Chi P (2023) Simulation of rock electrical properties in deep reservoirs based on digital rock technology. Processes 11(6):1758
Keller GV (2017) Electrical properties of rocks and minerals. Handbook of physical properties of rocks (1982) CRC Press. Wiley-Blackwell, New Haven, pp 217–294
Loke MH (1999) Electrical imaging surveys for environmental and engineering studies. A practical guide to 2-D and 3-D surveys. https://pages.mtu.edu/~ctyoung/LOKENOTE.PDF Accessed 23 August 2023
Parkhomenko EI (1982) Electrical resistivity of minerals and rocks at high temperature and pressure. Rev Geophys 20(2):193–218
Glover PWJ (2015) 11.04–Geophysical properties of the near surface earth: electrical properties. Treatise on geophysics, pp.89–137.https://homepages.see.leeds.ac.uk/~earpwjg/PG_EN/Mypdfs/2015_Glover_ToG2_LD.pdf Accessed 12 October 2023
Scott JH (1983) Electrical and magnetic properties of rock and soil. Open-Fil e Report 83–915,United States, Department of the Interior,Geological Survey. https://pubs.usgs.gov/of/1983/0915/report.pdf Accessed 08 September 2023
Shankland TJ, Ander ME (1983) Electrical conductivity, temperatures, and fluids in the lower crust. J Geophys Res: Solid Earth 88(B11):9475–9484
Paembonan AY, Febriansanu DR, Huseina AA, Sigalingging AS, Nathania EY, Andika PP (2021) Preliminary result of electrical resistivity and electromagnetic methods to determine the bedrock. IOP Conf Ser: Earth Environ Sci 830(1):1–13
Han K, Clark SM (2021) Review of calculating the electrical conductivity of mineral aggregates from constituent conductivities. Solid Earth Sci 6(2):111–128
Leucci G (2008) Ground penetrating radar: the electromagnetic signal attenuation and maximum penetration depth. Sch Res Exch 2008:1–7
Zhang H, Zhu M, Li X, Han W, Liu Z (2020) Very low frequency propagation characteristics analysis in coal mines. IEEE Access 8:95483–95490
Prattes G, Schwingenschuh K, Eichelberger HU, Magnes W, Boudjada M, Stachel M, Vellante M, Wesztergom V, Nenovski P (2008) Multi-point ground-based ULF magnetic field observations in Europe during seismic active periods in 2004 and 2005. Nat Hazard 8(3):501–507
Al-Hameedawi MM, Thabit JM, Al-Menshed FH (2021) Some notes about three types of inhomogeneity and their effect on the electrical resistivity tomography data. J Appl Geophys 191:1–18
Rauf M, Khan AM, Ansari A, Jilani MT, Shahzeb T (2019) Skin depth verification of the electromagnetic waves for hydrocarbon detection. Int J Appl Electromagnet Mech 60(3):313–326
Sun Z, Akyildiz IF, Kisseleff S, Gerstacker W (2019) Increasing the capacity of magnetic induction communications in RF-challenged environments. IEEE Trans Commun 61(9):3943–3952
Yan L, Waynert JA, Sunderman C (2013) Measurements and modeling of through-the-earth communications for coal mines. IEEE Trans Ind Appl 49(5):1979–1983
Tal N, Morag Y, Levron Y (2017) Magnetic induction antenna arrays for MIMO and multiple-frequency communication systems. Progress in Electromagnetics Research C75:155–167
Ghosh D, Moon HS, Sarkar TK (2008) Design of through-the-earth mine communication system using helical antennas. IEEE Antennas and Propagation Society International Symposium, San Diego, CA, USA, pp 1–4
Liu Y, An Z, Wang Q, Pan R, Liu X, Liu J (2020) Research on intrinsic-safe through-the-earth radio communication system technology with large depth. 12th International Conference on Communication Software and Networks (ICCSN). Chongqing, China, pp 124–128
Morag Y, Tal N, Levron Y (2017) Optimization of channel capacity in magnetic communication systems subjected to total power constraint. IEEE International Conference on Microwaves, Antennas, Communications and Electronic Systems (COMCAS). Tel-Aviv, Israel, pp 1–6
Capek M, Gustafsson M, Schab K (2017) Minimization of antenna quality factor. IEEE Trans Antennas Propag 65(8):4115–4123
Capek M, Jelinek L, Vandenbosch GA (2016) Stored electromagnetic energy and quality factor of radiating structures. Proc Math Phys Eng Sci 472:2188
Shi S (2018) Antenna limitations and Q-factor trade-off between parameters, steps towards optimal antenna design. Dissertation, KTH Royal Institute of Technology
Fujita K, Shirai H (2015) Theoretical limitation of the radiation efficiency for homogenous electrically small antennas. IEICE Trans Electron 98(1):2–7
Jelinek L, Schab K, Capek M (2018) Radiation efficiency cost of resonance tuning. IEEE Trans Antennas Propag 66(12):6716–6723
Best SR, Hanna DL (2010) A performance comparison of fundamental small-antenna designs. IEEE Antennas Propag Mag 52(1):47–70
Best SR (2015) Electrically small resonant planar antennas: optimizing the quality factor and bandwidth. IEEE Antennas Propag Mag 57(3):38–47
Sievenpiper DF, Dawson DC, Jacob MM, Kanar T, Kim S, Long J, Quarfoth RG (2012) Experimental validation of performance limits and design guidelines for small antennas. IEEE Trans Antennas Propag 60(1):8–19
Pfeiffer C (2017) Fundamental efficiency limits for small metallic antennas. IEEE Trans Antennas Propag 65:1642–1650
Shahpari M, Thiel DV (2018) Fundamental limitations for antenna radiation efficiency. IEEE Trans Antennas Propag 66(8):3894–3901
Pathak V, Kumar V, Barik RK (2018) Magnetic induction communication based transceiver coil and waveguide structure modeling for non-conventional WSNs. 2018 9th International Conference on Computing, Communication and Networking Technologies (ICCCNT). Bengaluru, India, pp 1–7
Sun Z, Akyildiz IF (2012) On capacity of magnetic induction-based wireless underground sensor networks. Proceedings IEEE INFOCOM, Orlando, FL, USA, pp 370–378
Kisseleff S, Akyildiz IF, Gerstacker WH (2018) Survey on advances in magnetic induction-based wireless underground sensor networks. IEEE Internet Things J 5(6):4843–4856
Sun Z, Akyildiz IF (2010) Magnetic induction communications for wireless underground sensor networks. IEEE Trans Antennas Propag 58(7):2426–2435
Masihpour M, Franklin D, Abolhasan M (2013) Multihop relay techniques for communication range extension in near-field magnetic induction communication systems. J Networks 8(5):999–1011
Gulbahar B, Akan OB (2012) A communication theoretical modeling and analysis of underwater magneto-inductive wireless channels. IEEE Trans Wireless Commun 11(9):3326–3334
Qiao G, Muzzammil M, Ahmed N, Ullah I (2020) Experimental investigation of optimal relay position for magneto-inductive wireless sensor networks. Sensors 20(9):2720
Sun Z, Akyildiz IF (2009) Underground wireless communication using magnetic induction. 2009 IEEE International Conference on Communications. Dresden, Germany, pp 1–5
Malik PS, Abouhawwash M, Almutairi A, Singh RP, Singh Y (2022) Comparative analysis of magnetic induction-based communication techniques for wireless underground sensor networks. PeerJ Computer Science 8:1–24
Ishtiaq M, Hwang S-H (2021) Performance analysis of multihop underground magnetic induction communication. Electronics 10(11):1255
Mittu M, Lenin J (2014) Study on the parameters affecting magnetic induction waveguide for underground communication. Int J Innov Res Sci Eng Technol 3(5):112–118
Yan L, Zhou C, Reyes M, Whisner B, Damiano N (2017) Mathematical modeling and measurement of electric fields of electrode-based through-the-earth (TTE) communication. Radio Sci 52(6):731–742
Yan L, Zhou C, Miguel R, Whisner B, Damiano N (2016) E-fields of electrode-based through-the-earth (TTE) communication. 2016 IEEE Industry Applications Society Annual Meeting. Portland, OR, USA, pp 1–8
Bataller V, Muñoz A, Gaudó PM, Mediano A, Cuchó JA, Villarroel JL (2010) Earth impedance model for through-the-earth communication applications with electrodes. Radio Sci 45(06):1–18
Bataller V, Muñoz A, Molina-Gaudó P, Mediano A, Cuchí JA, Villarroel JL (2009) Improving medium access in through-the-earth VLF-LF communications. J Commun 4(4):284–294
Bataller V, Munoz A, Gaudó PM, Mediano A, Cuchí JA, Villarroel YJ (2012) Electrode impedance measurement in through-the-earth communication applications. IET Microw Antennas Propag 6(7):807–812
Van L, Sunderman C (2015) Electric field of grounded horizontal line transmitter for through-the-earth communication. 2015 31st International Review of Progress in Applied Computational Electromagnetics (ACES). Williamsburg, VA, USA, pp 1–2
Korolkova E, Kudinov D, Artemev D, Farlow W, Fernando X (2018) Technological advancement for a novel through-the-earth communication system. IEEE Canadian Conference on Electrical & Computer Engineering (CCECE). Quebec, QC, Canad, pp 1–5
Muñoz A, Mediano A (2012) Output design considerations in wireless portable through-the-earth communications system using current injection. 42nd European Microwave Conference. Amsterdam, Netherlands, pp 1237–1240
Mussett AE, Khan MA (2000) Looking into the earth: an Introduction to Geological Geophysics. Cambridge University Press, New York
Walker PW, West GF (1992) Parametric estimators for current excitation on a thin plate. Geophysics 57(6):766–773
Wang M (2005) Electrode models in electrical impedance tomography. Journal of Zhejiang University-SCIENCE A 6:1386–1393
Cardu R, Leong PH, Jin CT, McEwan A (2012) Electrode contact impedance sensitivity to variations in geometry. Physiol Meas 33(5):817
Dardé J, Staboulis S (2016) Electrode modelling: the effect of contact impedance. ESAIM: Math Model Numer Anal 50(2):415–431
Hördt A, Weidelt P, Przyklenk A (2013) Contact impedance of grounded and capacitive electrodes. Geophys J Int 193(1):187–196
Hao J, Mou Y, Yan B (2017) Impact of rods configuration on electrodes impedance of through-the-earth communication system. Int J Hybrid Inf Technol 10(8):101–110
Carpenter Jr RB, Lanzoni JA (2007) Designing for a low resistance earth interface (grounding). Lightning Eliminators & Consultants, Inc.https://www.lightningprotection.com/wp-content/uploads/2018/03/Designing-for-a-Low-Resistance-Earth-Interface-Rev.-B-Carpenter-Lanzoni-Oct-2007.pdf Accessed 19 May 2023
Okyere PY, Eduful G (2006) Reducing earth electrode resistance by replacing soil in critical resistance area. J Mod Eng 6(2) https://www.researchgate.net/publication/277597858_Reducing_Earth_Electrode_Resistance_by_Replacing_Soil_in_Critical_Resistance_Area. Accessed 11 Nov 2023
Kasap S, Koughia C, Ruda HE (2017) Electrical conduction in metals and semiconductors. In: Kasap S, Capper P (eds) Springer Handbook of Electronic and Photonic Materials. Springer Handbooks. Springer, Cham
Hada K, Kunieda M (2013) Analysis of wire impedance in wire-EDM considering electromagnetic fields generated around wire electrode. Proc CIRP 6:244–249
Burrows M, Niessen C (1972) ELF communication system design. Ocean 72 - IEEE International Conference on Engineering in the Ocean Environment. Newport, RI, USA, pp 95–109
Podoltsev AD, Kucheryavaya IN, Lebedev BB (2003) Analysis of effective resistance and eddy-current losses in multiturn winding of high-frequency magnetic components. IEEE Trans Magn 39(1):539–548
Hersir GP, Árnason K (2009) Resistivity of rocks. Presented at Short Course on Surface Exploration for Geothermal Resources, UNU-GTP and LaGeo, Ahuachapan and Santa Tecla, El Salvador, 17–30 October, 2009. https://gogn.orkustofnun.is/unu-gtp-sc/UNU-GTP-SC-09-06.pdf. Accessed 20 Nov 2023
Karato SI, Wang D (2013) Electrical conductivity of minerals and rocks. Phys Chem Deep Earth 3:145–182
Nover G (2005) Electrical properties of crustal and mantle rocks–a review of laboratory measurements and their explanation. Surv Geophys 26(5):593–651
Kiberu J (2002) Induced polarization and resistivity measurements on a suite of near surface soil samples and their empirical relationship to selected measured engineering parameters. Dissertation, International Institute for Geo-information Science and Earth Observation
Keevil NB, Ward SH (1962) Electrolyte activity: its effect on induced polarization. J Geophys 27(5):677–690
Dias C (2000) Developments in a model to describe low-frequency electrical polarization of rocks. J Geophys 65(2):437–451
Unde M, Tathe V (2020) Soil resistivity measurement and interpretation technique. Int J Eng Res Appl 10(5):25–30
Wenner F (1916) A method of measuring earth resistivity. US Department of Commerce. Bull Bureau Stand 12(3):469–478
Andrade MT (2021) A new simplified method for soil modeling in two horizontal layers. IEEE URUCON, Montevideo, Uruguay, pp 476–480
Sinchi-Sinchi F, Coronel-Naranjo C, Barragán-Escandón A, Quizhpi-Palomeque F (2022) Soil treatment to reduce grounding resistance by applying low-resistivity material (LRM) implemented in different grounding systems configurations and in soils with different resistivities. Appl Sci 12(9):4788
Tyler RH, Sanford TB, Unsworth MJ (1998) Propagation of electromagnetic fields in the coastal ocean with applications to underwater navigation and communication. Radio Sci 33(4):967–987
Chave AD, Flosadóttir AH, Cox CS (1990) Some comments on seabed propagation of ULF/ELF electromagnetic fields. Radio Sci 25(5):825–836
Bubenik DM, Fraser-Smith AC (1978) ULF/ELF electromagnetic fields generated in a sea of finite depth by a submerged vertically-directed harmonic magnetic dipole. Radio Sci 13(6):1011–1020
Domingo MC (2012) Magnetic induction for underwater wireless communication networks. IEEE Trans Antennas Propag 60:2929–2939
Al-Shamma’a AI, A. Shaw A, Saman S, (2004) Propagation of electromagnetic waves at MHz frequencies through seawater. IEEE Trans Antennas Propag 52(11):2843–2849
Mari L (2020) How to improve resistance to ground. Electrical engineering portal, Energy and Power, Testing and Commissioning. Available online: https://eepower.com/technical-articles/how-to-improve-resistance-to-ground/# Accessed 23 September 2023
Kazmi D, Qasim S, Siddiqui FI, Azhar SB (2016) Exploring the relationship between moisture content and electrical resistivity for sandy and silty soils. Int J Eng Sci Invent 5(6):33–35
Abu-Hassanein ZS, Benson CH, Blotz LR (1996) Electrical resistivity of compacted clays. J Geotech Eng 122(5):397–406
Murad OF (2012) Obtaining chemical properties through soil electrical resistivity. J Civil Eng Res 2(6):120–128
Csanyi, E. 2016. Earth electrode resistance. Electrical engineering portal, Energy and Power, Testing and Commissioning. Available online: https://electrical-engineering-portal.com/improve-earth-electrode-resistance Accessed 12 August 2023
Pozdnyakova LA (1999) Electrical properties of soils. Dissertation, University of Wyoming
Lyu C, Sun Q, Zhang W, Hao S (2019) Effects of NaCl concentration on electrical resistivity of clay with cooling. J Appl Geophys 170:103843
Kusim AS, Abdullah NE, Hashim H, Kutty SB (2013) Effects of salt content on measurement of soil resistivity. IEEE 7th International Power Engineering and Optimization Conference (PEOCO). Langkawi, pp 124–128
Widodo CS, Sela H, Santosa DR (2018) The effect of NaCl concentration on the ionic NaCl solutions electrical impedance value using electrochemical impedance spectroscopy methods. AIP Conference Proceedings 2018 Oct 17 (Vol. 2021, No. 1). AIP Publishing
Sheeler JB, Picaut JG, Demirel T (1962). Electrical resistivity of soil-sodium chloride systems. HRB Bull. 349:9–28 https://onlinepubs.trb.org/Onlinepubs/hrbbulletin/349/349-002.pdf Accessed 19 May 2023
Tang B, Sun X, Zou J (2015). Overview of Method for Reducing Grounding Resistance of Substation Grounding System. Proceedings of the 2015 International Symposium on Computers & Informatics, pp. 773–780 https://www.atlantis-press.com/proceedings/isci-15/17486 Accessed 27 August 2023
Lim SC, Gomes C, Kadir MZ (2013) Preliminary grounding performance of bentonite mixed concrete encased steel cage under high soil resistivity condition. Int J Elec Power 47:117–128
Lim SC, Gomes C, Ab Kadir MZ (2013) Characterizing of bentonite with chemical, physical and electrical perspectives for improvement of electrical grounding systems. Int J Electrochem Sci 8(9):11429–11447
Hardi S, Kristian A, Hasibuan A, Nasution A, Alfhisyari M (2022) Mitigation of soil resistivity using composition of zeolite, NaCl, and charcoal. J Phys: Conf Ser 2193(1):1–6
Hamzah MN, Gomes C, Afiq M, Ab Kadir MZA (2023) Performance of active electrical earthing systems: background and methodology. 12th Asia-Pacific International Conference on Lightning (APL). Langkawi, Malaysia, pp 1–6
Alsharari B, Olenko A, Abuel-Naga H (2020) Modeling of electrical resistivity of soil based on geotechnical properties. Expert Syst Appl 141:1–7
Abidin MH, Wijeyesekera DC, Saad R, Ahmad F (2013) The influence of soil moisture content and grain size characteristics on its field electrical resistivity. Electron J Geotech Eng 18:699–705
Onyedikach SN, Gomes C, van Coller J (2022) Equations for predicting the volumetric water content affecting the resistivity of soil in the vicinity of a driven earth electrode in variably saturated homogeneous soil. 36th International Conference on Lightning Protection (ICLP). Cape Town, South Africa, pp 1–6
Lim SC, Gomes C, Ab Kadir MZ (2013) Electrical earthing in troubled environment. Int J Electr Power Energy Syst 47:117–128
Dafalla M, Al-Mahbashi A, Al-Shamrani M. Trends of moisture and electrical conductivity in clay liners. Geofluids2018:1–7. https://www.hindawi.com/journals/geofluids/2018/8391830/ Accessed 13 September 2023
Bai W, Kong L, Guo A (2013) Effects of physical properties on electrical conductivity of compacted lateritic soil. J Rock Mech Geotech Eng 5(5):406–411
Campbell RB, Bower CA, Richards LA (1948) Change of electrical conductivity with temperature and the relation of osmotic pressure to electrical conductivity and ion concentration for soil extracts. Soil Sci Soc Am Proc 13:66–69
Denche G, Faleiro E, Asensio G, Moreno J (2021) Grounding electrodes with internal resistance: application to feasibility study of the driven-rod method for modeling the soil electrical resistivity profile. Appl Sci 11(11):5032
Faleiro E, Asensio G, Denche G, Moreno J (2022) A fast method to compute the grounding resistance of a coated electrode using the coated electrode equivalent radius. Int J Electr Power Energy Syst 137:107879
Denche G, Faleiro E, Asensio G, Moreno J (2022) A fast calculation of partially corroded, grounding-resistive electrode electrical parameters. Appl Sci 12(23):12243
Helmenstine AM (2019) Table of electrical resistivity and conductivity. ThoughtCo. https://www.thoughtco.com/table-of-electrical-resistivity-conductivity-608499 Accessed 13 October 2023
Muttamara A, Fukuzawa Y, Mohri N, Tani T (2009) Effect of electrode material on electrical discharge machining of alumina. J Mater Process Technol 209(5):2545–2552
Haron CC, Ghani JA, Burhanuddin Y, Seong YK, Swee CY (2008) Copper and graphite electrodes performance in electrical-discharge machining of XW42 tool steel. J Mater Process Technol 201(1–3):570–573
Adebisi AA (2012) Calculating the surface seismic signal from a trapped miner. West Virginia University, Thesis
Forney F, Armatin JP (2001) Development of a seismic system for the detection of trapped miners. 5th International Symposium on Rockbursts and seismicity in mines. Sandton, South Africa
University of Utah (2009) Finding trapped miners. scientists develop new approach to mine disasters. https://archive.unews.utah.edu/news_releases/finding-trapped-miners/ Accessed 19 October 2022
Heasley KA, Yi L, Monte H (2006) Seismic field test at 4 West Mine. Project report, West Virginia University
Heasley KA, Yi L, Monte H (2007) Seismic field test at Federal No. 2 Mine. Project report, West Virginia University
Heasley KA (2011) Seismic field test surewave technology at Federal #2 mine. https://miningquiz.com/pdf/Mine_Emergency/2ndSeismicTestingAtFederal.pdf. Accessed 23 Oct 2022
Heasley KA (2012) evelopment of a seismic system for locating trapped miners. Project Report, West Virginia University
Cumming-Potvin D, Wesseloo J, Potvin Y, Green M (2013) Investigating the potential for locating trapped miners using a pre-existing microseismic monitoring system. 8th International Symposium on Rockbursts and Seismicity in Mines. pp 145–156
Squire JC, Sullivan GA, Baker EW, Flathers GW (2009) Proof-of-concept testing of a deep seismic communication device. Soc Mining, Metall, Explor 326:97–100
Funding
Open access funding provided by University of Pretoria.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of Interest
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ngwenyama, P.L., Webber-Youngman, R.C.W. A Review of the Applications of Through-the-Earth (TTE) Communication Systems for Underground Mines. Mining, Metallurgy & Exploration (2024). https://doi.org/10.1007/s42461-024-01056-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s42461-024-01056-5