
Abstract
Born in art, the tensegrity logics have been advanced in disciplines from architecture and human anatomy. Biotensegrity principles introduce an adaptive, ‘living’ structural model characterized by networks of interconnected components and tendons with a shape adaptive capacity. Bending-active is an approach to form-force equilibria that adopts actively curving beams and surfaces within their elastic ranges. BeTA Pavilion explores the formal opportunities of biotensegrity logics using elastically bent glass fiber reinforced plastic rods and CNC knitted textiles. Its bending-active system (inspired by animal vertebrae typologies) is composed of prestressed and self-stabilized tetrahedron modules that are arrayed and sequenced to produce structural equilibrium with a bandwidth of dynamic motion. The paper details the iterative design process employing physical and computational modeling and testing for the new adaptive and dynamic structural assembly coupling bending-active textile hybrid with biotensegrity logics.
Similar content being viewed by others


1 Introduction
Understanding the inseparable relationship between form and force is fundamental to efficient, expressive, and sustainable structural designs. Gridshells, membranes, tensegrities, form-active systems and other newly emerging structural types have capitalized on advances in material sciences, form-finding practices, and computational technologies. Textiles hold great potential for future design innovation as a pliable, structural material. Their responsiveness to knit or woven patterns, generate elegant yet efficient curvature and form. Textiles have spawned a variety of structural methods and applications. Fabric formwork for concrete casting has been an evolving structural type since its patenting in 1934, with Miguel Fisac (1913–2006), Mark West, Kenzo Unno, John Orr, Philippe Block, and others exploring the architectural, spatial and aesthetic expressiveness of flexible formwork [1, 2]. Orthogonal bias muslin fabric has served as an effective substrate for conical ice pavilions [3,4,5], while computer numerical control (CNC) knitted textiles have enabled complex substructures for concrete mixtures as well as graceful performative tensioning systems [6]. Applications in computationally programmed textiles are an expanding practice with opportunities for continued innovation through structural hybridization and material pairings.
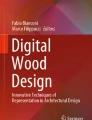
Tensegrity principles have been advanced in disciplines from architecture, to biology, and human anatomy [7,8,9]. Its logics root biotensegrity theory and have launched new paradigms of understanding in human biomechanics by introducing ‘living’ structures with a capacity of shape adaptability (Fig. 1). Many new active and dynamic structural systems with complex curvature have been generated using elastically bent materials with prestressing.

Tetrahedral vertebral masts model (@copyright Flemons 2006, reprint with permission)
The concept of “bending-active” systems was introduced in 2013 to describe curved beams and surfaces elastically deformed from an originally straight or flat state using form-force equilibria [9,10,11,12]. Compared to traditional construction materials, bending-active systems offer new types of shape-controlled structures with reversible elastic deformations and adaptive geometry.
Principles for a novel hybrid structure are formulated in this study by adopting logics of biotensegrity and form-active techniques with interconnected CNC knitted fabrics. This paper details a cross-disciplinary design process employing iterative physical and computational modeling for an adaptive, dynamic structural assembly—the BeTA Pavilion.
The pavilion was successfully constructed as a temporary exhibition during the 2019 Symposium of International Association for Shell and Spatial Structures Form & Force Expo in Barcelona, Spain. Guided by form-active protocols and assemblies, the pavilion explores the formal opportunities of biotensegrity kinetics with a bandwidth of dynamic motion to generate both predetermined and non-predetermined shapes. Its bending-active systems (inspired by animal vertebrae typologies) is comprised of pre-stressed and self-stabilized tetrahedron modules that are arrayed, sequenced and connected by the CNC knitted textiles through pre-tension to produce structural equilibrium with a bandwidth of dynamic motion.The following projects reviewed in this text highlight novel practices, protocols and techniques in contemporary form-active textile design instrumental to our study.
1.1 Bending-active structures with textiles | literature review
Three innovative bending-active structures have been studied by Liu and Davis-Sikora [9] to compare methods and practices in hybrid form-active systems. Case studies include: (1) Textile Hybrid M1 at La Tour de 1’Architecte designed by architects and engineers from the Institute for Computational Design (ICD), and the Institute of Building Structures and Structural Design (ITKE) at the University of Stuttgart (Fig. 2); (2) a bending-activate tensegrity structure designed and constructed by designers from the Technische Universität München (Fig. 3); and (3) a bending-active tensile membrane hybrid tower designed by researchers from Centre for Information Technology and Architecture (CITA) at Royal Danish Academy of Fine Arts, and the Department for Structural Design and Technology (KET) at University of Arts Berlin (Fig. 4).

Textile Hybrid M1, ([12]; reprint with permission)

Bending-activated tensegrity structure ([13], reprint with permission)

CITA/KET Tower ([14], reprint with permission)
Textile hybrid M1 was constructed to showcase a historical and structurally sensitive 16th century tower designed by Leonardo Da Vinci in Monthoiron, France. Integrating form-active rods and membranes, an overlapping grid-shell was created to encompass an approximate 20 m2 (215 ft2) area. 110 m (361 feet) of glass fiber reinforced polymer (GFRP) rods and 45 m2 (484 ft2) of textiles were prestressed into a doubly-curved tensile arching surface along a 6–8 m (20–26 feet) span.
A full-scale bending-activated tensegrity structure was designed and constructed by Schling et al. and integrates “principles of active bending, tensegrity and structural membranes” (Fig. 3) [13]. The structural assembly is composed of four 10 m (32.8 ft) linear elastically bent GFRP bundles, each consisting of three GFRP rod sub-bundles and eighteen polyester belts. Four polyvinyl chloride membranes are used to prestress the collection of bent rod assemblies into an undulating surface with a footprint of 6 m × 6 m (19.7 ft × 19.7 ft). The minimum radius of curvature designed for the GFRP bundles was 1400 mm (55 in.).
Originally exhibited in the Courtyard of the Danish Design Museum (Fig. 4) CITA tower is a hybrid bending-active membrane structure designed by researchers from CITA and KET [14]. It is constructed of integrated GFRP rods and CNC knit textiles designed with bespoke structural patterns and detailing to control material behavior and performance [15]. A more recent version of the tower was built by the research team in 2016 with “convergence of the simulated and real behaviour of the structure” [15].
Physical, computational and finite element modeling (FEM) were employed in form development for all three bending-active structures studied. Design intuition played an important role in producing the initial rods configurations and geometries for each project. However, exhaustive physical form-finding experiments are necessary at a variety of scales to confirm the complex interaction among prestressed members and assemblies. “The complexity of the form-active textile hybrid belies intuition, iterative feedback through the computational environment elicits knowledge in particular topological and behavioral manipulations” [16]. Computational modeling is an effective complement to physical modeling to study the relationships between complex topological structures and their material behaviors.
The geometry and rod configurations in Textile Hybrid M1, were developed through physical and computational modeling, then subsequently evaluated using Sofistik®, a finite element analysis program to assess structural performance and specify materials for construction. Spring based computational modeling with established numerical methods (including cross-over, vertex position and vertex normal) [17] was adopted to define the complex topologies of the structure. An elastic cable protocol was adopted in Sofistik® to pull a planar array of the rods into a bent configuration. The membrane was then attached to the rods, prestressed, and the structure iteratively reshaped until the permissible stresses in the bent rods were reached. Finite element modeling verified the geometry of the structure, evaluated residual stresses in the rods, and analyzed deformations and stress levels under external loads.
A FEM software Strand7® was used by Schling et al. [13] to simulate the form-finding and perform the structural analysis for their form-active tensegrity structure (Fig. 3). Different from the Textile Hybrid M1, the GFRP bundles were bent by induced displacement of supports with testing data to verify the flexural strength and modulus of elasticity. Pre-tension was introduced in the cables and membranes to produce the configuration of the structure. Additional tensioning elements were used to connect the bundles at the midpoints to increase its stiffness.
Because of CITA tower’s complex bending-active system (Fig. 4), the elastic cable approach proposed by Lienhard [11] using FEM for form-finding reached its limit and did not work for this project. A two-step process was adopted using Kangaroo 2®, (Grasshopper® plug-in for Rhino®) and Sofistik®. Grasshopper/Kangaroo 2® interface was applied to study tower topologies and form generation. Real-time feedback was provided by Rhino®, with algorithms “generating, exercising, and refining constraints” [14]. Baked geometry was later exported to Sofistik® to study geometric performance by superimposing residual stresses upon the form-found model including dead load and external wind forces.
Inspired by the biomechanical properties of the spinal column (Fig. 1), a bending-active biotensegrity green wall was designed by the authors [9] for an adaptive, structural indoor farming system (Fig. 5). The structure builds from a single regular tetrahedron module approximately 91 cm × 91 cm × 30 cm (3ft × 3ft × 1ft) in dimension. Tetrahedrons were selected for their structural, geometric efficiency and aggregation patterning (Fig. 6). Based upon the three cases reviewed, physical and computational modeling were adopted iteratively and collaboratively to inform form-finding and structural performance. The design process was initiated with a set of full-scale physical experiments that tested material elasticity associated with a variety of GFRP rod cross-sections. Computational simulations in Kangaroo 2® with polyline input were combined with mesh relaxation and active bending protocols, to compare computation and physical behaviors. Although testing indicates these models exhibit continued structural and self-supporting capacity within the system’s elastic range, their load bearing capacity is limited. The large elastic deformation does not meet the loading requirements for the farming wall. Prestress knit membranes coupled with bundled rods are being tested to increase the global structural stability of the biotensegrity wall structure (Fig. 7).

Conceptual design for an adaptable indoor farming system (rendered by Ziyan Ye)

Prototype of the bending-active biotensegrity structure

Bending-active tetrahedron with CNC knit membrane
1.2 BeTA pavilion
1.2.1 Design steps and process
Building upon systems developed in the growing wall project and drawing inspiration from form-finding processes adopted in CITA tower (Fig. 8), a dynamic biotensegrity pavilion structure was developed (Fig. 9).


Conceptual design
The BeTA pavilion project exploits the dynamic properties of biotensegrity organizations within a form-active hybrid system. A kinematic chain composed of self-stabilized tetrahedron geometries was designed to accentuate vertebral patterns of movement. Human vertebrae shift positions along helical paths in spinal movement [7]. The inherent flexibility and curvature of spinal biomechanics was targeted in this project to develop the pavilion’s global form.
The project’s hyperbolic paraboloid geometry was parametrically derived using a Grasshopper/Kangaroo 2® interface, and was developed based on a scaled, sequential array of regular, bent rod tetrahedron modules to enhance the overall structural performance (Fig. 10). Self-similar structural hierarchies found in natural systems drove tetrahedron scaling and module dimensioning within the design.

Bent rod study for BeTA pavilion
Computational modeling was initially used to study variations in tetrahedron count, sizing and spacing. Physical prototyping of tetrahedron assemblies during the subsequent phase confirmed the flexural strength and acceptable bending resistances of the 45 modules within the pavilion array. Tetrahedron dimensions ranged from 30.5 cm (12”) to 76.2 cm (30”) (pre-bent length), and scaled in 5.1 cm (2”) increments. Bundled rods (3 per leg) were introduced in tetrahedron modules where flexural bending achieved levels of structural instability.
Akin to the performance of semi-rigid bodies of the human spine, the tetrahedrons were paired with CNC knit textile surfaces and knit pre-tensioned (tendon-like) connectors, to produce a passively stable system [18]. The pavilion is a compliant structure [18], locally responsive to human touch with slight kinetic motion [https://vimeo.com/480591272]. It is an adaptive, ‘living’ structural model characterized by networks of interconnected components and tendons with a shape adaptive capacity. Prestress intensities of hinged connections between adjacent tetrahedrons and their respective corresponding vertices dictate local patterns of kinetic movement and the global pavilion geometry.
1.2.2 Physical and computation form-finding
The initial hyperbolic paraboloid geometry was generated using Grasshopper/Kangaroo 2® interface. Like the bending-active biotensegrity green wall project, the sequential array of bending-active tetrahedron modules (Fig. 10) were generated using polylines and mesh relaxation protocols. The computational model, however, was unable to accurately analyze the sequence of tetrahedron modules, determinate forces applied to the GFRP rods, or predict textile prestressed shape deformations due to the dynamics of module connections. Iterative physical and computational modeling was required to assess the complexities of the pavilion’s hybrid form-active system (Figs. 11 and 12).

Physical study model

Computational form-finding using Kiwi!3D
Physical modeling began with the assembly of multiple 30.5 cm (12”) long GFPR rods with a diameter of 1.588 mm (1/16”) (Fig. 11), which was followed by studies of textile connections between tetrahedron pairs. These prototypes resulted in a self-balanced and dynamic structure with curvature responsive to the tensile forces imposed by the bespoke CNC knit patterns. Large deformations were produced in the bottom tetrahedron (with 1.588 mm—1/16” single rods edges) due to tensioning in the textile. Rods with a larger diameter could be used to increase stiffness, however, greater bending moments required to achieve the target curvature would fracture shorter length rods. Moreover, increased forces acting on the rod connectors situated at the vertices could torque or split. Bundled rods were introduced in areas of over flexure to retain target bent curvature and increase structural stiffness. Connector geometries were developed to retain rod positioning and ease textile/rod intersections. Smooth ends were introduced to avoid piercing and more effectively distribute tensile forces to the fabric at the vertices.
A computational form-finding algorithm was proposed in this study using Kiwi!3D Finite Element Analysis (FEA) in Grasshopper, to determine the force applied to the GFRP rod and predict deformed shape of prestressed textile due to the module connections (Fig. 12). Kiwi!3D offers an integrated analysis method that uses Non-Uniform Rational B-Splines (NURBS) to perform FEA, and avoids the translation of Rhino® geometry to meshes. [19,20,21]. A scaled pyramid with fixed ends and membrane faces was modeled in Rhino®, after which a controllable prestress was applied through Kiwi!3D to extract isogeometric analysis. The prestressed membrane curvature was calculated and later used to confirm the required bending moment and applied force necessary for the rod connectors.
To determine the tensile shape of the textile connecting two tetrahedrons, the membrane is defined by the three bottom vertices of the top tetrahedron, as well as the top and two bottom vertices of the lower tetrahedron. A controllable prestress determines the deformed shape of the membrane due to tensioning. A hole is incorporated in the membrane to make the surface more porous. The membrane stress distribution diagram displayed the highest stress concentrating at the top vertex of the bottom tetrahedron (Fig. 12). The digital models were created using default material values of GFRP rods, and Ethylene tetrafluoroethylene (ETFE) as membrane. The curved geometry of the GFRP rods in the digital model was calculated through the prestress applied to the ETFE membrane on the pyramid shown in Fig. 12. The model was then used to confirm the geometric deformation and develop form-force visualizations in the system. To more accurately simulate the force-form relationships of the proposed form-active hybrid system, actual material performance data (i.e. modulus of elasticity, tensile strength, stress–strain curve for non-linear analysis), should be identified, and input for the proposed BeTA pavilion. Loads can also be applied to the assembly to evaluate its structural performance in Kiwi!3D directly.
Although the results derived from the digital model in Fig. 12 did not represent the accurate geometry of the physical model, the designers identified the locations of the stress concentration and proposed an interlock jersey structure to strengthen the textile performance. A non-uniform stress distribution was anticipated in the fabric. Testing of the CNC knitted fabric’s mechanical properties has been proposed in the Phase II of the project, the data from which will be used to update the current computational model and perform linear and non-linear analyses. These accurate results will then be used to: (1) update the knitting geometry and patterns of the textile, (2) refine the global geometry of the pavilion according to the prestress introduced, and (3) control the stiffness of the structure.
1.3 Materialization and fabrication
-
(1)
Tetrahedrons assembled from GFRP
GFRP rods are connected into self-stabilized bending-active tetrahedrons using customized plastic connectors. The engineering properties for the fiberglass rods are listed in Table 1 [9]. Rods used in this project have two different diameters, 3.175 mm (1/8”) and 1.588 mm (1/16”).
The classical mechanics of material for flexural members (Eqs. 1 and 2) are used to define the relationship between the flexural strength and minimum radius of rod curvature, characterizing the bending-active nature of various GFPR rod types.
where \(\sigma\) = flexural strength, M = bending moment applied to the rod, t = radius of the rod, I = moment of inertia of the rod, r = radius of curvature due to the applied bending moment.
Solving for M/I from Eq. (1) and substituting derived M/I into Eq. (2),
Based on Eq. (3), the minimum radii of curvature are 7.9 cm (3.125 in) for 3.175 mm (1/8 in.) rods, and 3.9 cm (1.55 in.) for diameters of 1.588 mm (1/16 in). The minimum radius of curvature of bent rod in the physical prototype is estimated to be 30.48 cm (12 in.), which is 3.86 times larger than the minimum value determined by its flexural strength.
-
(2)
3D printed connectors
The connectors are crucial to distributing stress and achieving the textile’s target geometry. The FEA analysis in Kiwi!3D illustrates the stress concentration in the fabric at the vertices with oculi. A rounded top is required to avoid damaging the textile due to tensioning. Two connector types were therefore developed to support single and bundled rod assemblies. Both included two parts and have similar geometries. A typical three-bundled rod connector is shown in Fig. 13. The bottom section of this type has an overall length of 2.54 cm (1”) and wall thickness of 0.635 cm (1/4”) and is designed to carry bending forces to maintain rod alignment. The diameter and curve of the rods were found through computational modeling and used to define the geometry and holes to guide rods through. The upper portion of the connector is a hemisphere with a diameter of 1.27 cm (0.5 in) and a wall thickness of 0.635 cm (1/4”). It receives no stress, though requires a rounded top to mitigate textile damage. A variety of 3D printing materials were tested for strength and flexibility, including nylon, thermoplastic polyurethane, and polylactic acid (PLA). Flexible PLA was ultimately selected for its high tensile capacity and malleability. Rod bending resistances required a pliable material to ease hand assembly. Flexible PLA was also used to print the upper sections of the connectors but failed due to weakness in shear. Consequently, future installations should consider how to address this issue especially for more permanent installations. Composite material with reinforcements made of glass or carbon fiber thermoplastic or thermoset tows could be used to fabricate the connectors to achieve optimal mechanical performances under high stresses and increase the lifetime of the structure. Sensors could also be integrated into connectors to provide information on structural health and serve as a platform for predictive maintenance.

Design and fabrication for connectors
-
(3)
CNC knit textile
The textile development for the BeTA Pavilion started with the development of the textile plane and functional evaluations of the fabric. The textile is to serve as the soft tissue that connects each tetrahedron ‘vertebrae’. Through several iterations testing a variety of surfacing options and geometries, the final pattern was developed. The pattern was designed to connect three different tetrahedrons, correspondingly each tetrahedron connects to three different textile components as it supports the structure, making it possible to form a chain like that of the spine. The illustrated base pattern with superimposed triangles highlights the functions of the fabric (Fig. 14). The third connection to a tetrahedron is through the straps that are knitted into the pattern piece.

Knitting pattern of the textile
Based on the pattern shape, the initial sampling of structure gauge and yarn was established. An elaborate process of testing began by looking for a balance among fabric strength, stretch and lightness to produce the desired prestressing. The knitted textile was programmed on the M1 + software then knitted on a Stoll CMS 530 HP, 7.2-gauge industrial knitting machine. The file was developed as a 14-gauge knit with seven fields of intarsia knitting using 10 yarn carriers with two ends of air covered spandex consisting of 20 denier spandex core with one ply of 150 denier textured polyester. A set of drawing patterns was developed to study the knitted textile’s localized functions and structures (Figs. 15 and 16). The top of the knit bands (1) was designed with an interlock stitch to create a strong fabric with knitted slits. Slits were developed to receive the adjacent loop band and produce a continuous chain connection. The base of the fabric (2) is knit in a tubular pointelle composed of a two-layered fabric with holes that create an open textile designed to retain strength through a double layer. The bottom of the piece (3) is designed with a series of tubular sleeves. They are open on both sides to slide GFRP rods through and connect a selected tetrahedron edge to the textile. Four tube locations were knitted to provide prestressing options in stretch and sizing during on-site construction.

Details of knitting

Details of knitting continued
Tetrahedrons were also connected to the textile through knitted in pockets (Figs. 4 and 5). The pockets were designed to carry tension and force when GFRP rod ends are placed in, therefore an interlock jersey structure was chosen to provide the required strength.
Each textile piece connects two different tetrahedrons and contains three fabric pockets to link the adjacent neighbor. With 10 different tetrahedron sizes (scaling from 30.5 cm–2” to 76.2 cm–30” lengths) 22 different fabric types had to be knitted. The smallest piece for the 30.5 cm (12”) tetrahedrons measures 160 stitches in width and 282 stitches in length while the largest 76.2 cm (30”) piece measures 384 stitches in width and 752 stitches tall. In order to keep pattern pieces organized, and simplify the fabrication process, size annotations for both the current and adjacent tetrahedron were graphically knitted into the fabric as a part of the polka dot pattern aesthetic. The pattern graphic also describes the fields of tensile strength imposed upon the fabric through its prestressing.
-
(4)
Assembly
The pavilion construction began with the assembly of 45 individual tetrahedron modules using the 3D printed connectors and sized GFRP cut rods. For tetrahedrons requiring additional rigidity, small circular sleeves (8.75 mm in diameter) were slid onto 3-bundled rod sets during construction at third points to maintain rod alignments. Knit textiles were sorted by size (12” textile with 12” tetrahedron, etc.), and secured to their associated tetrahedron by threading one edge through a selected tubular sleeve. Textile pockets located in the center of the piece (adjacent to the knit aperture) were then attached to the connector on the opposing vertices to produce a knit panel face. The collection of panelized tetrahedrons were then arranged by size in a closed circle and connected to their neighbor by sleeving vertices into the adjacent fabric’s two lower edge and upper knit pockets. Tetrahedron positioning was based upon practicalities of lightest (and smallest) tetrahedrons at the top and larger (heavier) modules at the base (Fig. 17).

Tetrahedrons connected into a circle
Once linked, the tetrahedrons are pre-tensioned using the knit bands to produce a continuous directional chain (Fig. 18). Each tetrahedron has three external vertices; accordingly, three looped band connections are assembled. The series of slits on each band provide tensioning options during this process. It was discovered through early assembly efforts that pre-tensioning the interior vertices first helps to guide the global geometry into a pinched ellipse; or flattened target shape. Pre-tensioning the two sets of external vertices further directs the rotation of the tetrahedrons into a position closer to the final hyperbolic paraboloid form (Fig. 19).

Equilibrium condition achieved through pre-tensioned knit bands

BeTA Pavilion
The project’s asymmetry and directionality generated additional complexity to tensioning efforts during the assembly process. This was further complicated by the discovery that the project could be assembled by reversing the direction of the tetrahedron sequencing (from a clockwise to counter-clockwise arrangement), using a different set of pretensioning adjustments.
2 Conclusions and recommendations
The BeTA Pavilion is a new adaptive and dynamic structural assembly. While the structural potential of the biotensegrity system for this project is supported, further exploration of yarn choices, 3D printing materials, and GFRP rod flexibility needs to occur. The knitted textiles pockets are currently the weakest points of the structure as they receive significant tension from the tetrahedron vertices. These sections will need a reinforced system. Repeat installations and pack cycles will also require a stabilized yarn type that can withstand long-term deformation and textile creep.
Actual material performance data (i.e. modulus of elasticity, tensile strength, stress–strain curve for non-linear analysis for GFRP, CNC knitted textile, 3D printed connectors) should be identified and considered in the digital model. A computational design tool needs to be developed to simulate the complex assembly process considering asymmetry and directionality of the proposed form-active biotensegrity construction.
The pavilion’s utility as a compliant structure holds great potential for future research in hybrid interactive textile assemblies. The slight kinetic motion produced through touching, is a byproduct of the design’s unique arrangement of scaled, self-similar prestressed modules, and a noteworthy effect. The BeTA pavilion and previous bending-active greenwall project by the authors are a first step in an ongoing probe into the complex dynamics of biotensegrity biomechanics for form-active systems.
References
Orr JJ, Derby AP, Ibell TJ, Evernden MC, Otlet M (2011) Concrete structures using fabric formwork. Structures 112:97–105
Veenendaal D, West M, Block P (2011) History and overview of fabric formwork: using fabrics for concrete casting. Struct Concr 12(3):164–177
Liu R, Mistur M (2018) THRICE—an ice pavilion: reversing forces from construction to completion. In: Proceedings of 2018 symposium of international association for shell and spatial structures. July 16–July 20, Boston, USA
Liu R, Mistur M (2019) TW-ICE: a freestanding ice shell pavilion. In: Lázaro C, Bletzinger K-U, Oñate E (eds) Proceedings of IASS annual symposium 2019—structural membranes 2019, form and force, 7–10 October 2019, Barcelona, Spain
Pronk A, Mistur M, Li Q, Liu X, Blok R, Liu R, Wu Y, Luo P, Dong Y (2019) The 2017–18 design and construction of ice composite structures in Harbin. Structures 18:117–127
Popescu M, Rippmann M, Liew A, Van Mele T, Block P (2019) Concrete shell built using a cable-net and knitted formwork. Detail Struct 1:10–11
Scarr G (2014) Biotensegrity—the structural basis of life. Handspring Publishing, Scotland
Sharkey J (2015) BioTensegrity—anatomy for the 21st Century. http://www.johnsharkeyevents.com/blog/2015/3/11/biotensegrity-anatomy-for-the-21st-century. Accessed 2 Nov 2017
Liu R, Davis-Sikora D (2017) “Form-finding of an ecological “green” wall using bending-active biotensegrity structure. In: Smith R, Diaz Moore K, Zhao W (eds) Architecture of complexity—design, systems, society and environment: proccedings of the ARCC annual symposium 2017, Salt Lake City, Utah, USA, June 14–17, 2017
Lienhard J, Ahlquist S, Menges A, Knippers J (2013) Extending the functional and formal vocabulary of tensile membrane structures through the interaction with bending—active elements. In: Proceedings of the international TensiNET symposium, Istanbul
Lienhard J (2014) Bending-active structures—form-finding strategies using elastic deformation in static and kinetic systmes and the structural potentials therein. Institut für Tragkonstruktionen und Konstruktives Entwerfen: Forschungsbericht 36
Lienhard J, Jan Knippers (2015) Bending-active textile hybrids. J Int Assoc Shell Spatial Struct 56(1):37–48
Schling E, Barthel R, Ihde A, Tutsch J, Huth S (2015) Bending-activated tensegrity. In: Proceedings of the international association for shell and spatial structures symposium, August 17–20, Amsterdam, The Netherlands
Holden Deleuran A, Schmeck M, Quinn G, Gengnagel C, Tamke M, Ramsgaard Thomsen M (2015) The tower: modelling, analysis and construction of bending-active tensile membrane hybrid structures. In: Proceedings of the international association for shell and spatial structures symposium, August 17–20, Amsterdam, The Netherlands
Tamke M, Baranovskaya Y, Holden Deleuran A, Monteiro F, Fangueiro RMES, Stranghöhner N, Uhlemann J, Schmeck M, Gengnagel C, Ramsgaard Thomsen M (2016) Bespoke materials for bespoke textile architecture. In: Kawaguchi K, Ohsaki M, Takeuchi T (eds) Proceedings of the IASS annual symposium—“spatial structures in the 21st century”. September 26–30, Tokyo, Japan
Ahlquist S, Menges A (2013) Frameworks for computational design of textile micro-architectures and material behaviour in forming complex force-active structures. In: Beesley P, Khan O, Stacey M (eds) Proceeding of ACADIA 2013: adaptive architecture, pp 281–292
Volino P, Magnenat-Thalmann N (2006) Simple linear bending stiffness in particle systems. In: Proceedings for eurographics/ACM SIGGRAPH symposium on computer animation, Boston, USA
Ferguson S (2008) Biomechanics of the Spine. In: Boos N, Aebi M (eds) Spinal disorders. Springer, Berlin
Kiendl JM (2010) Isogeometric analysis and shape optimal design of shell structures. Dissertation
Bauer AM, Längst P, Wüchner R, Bletzinger K-U (2017) Isogeometric analysis for modeling and simulation of building processes. In: Proceedings of the IASS annual symposium 2017 “interfaces: architecture. engineering. science
Breitenberger M (2016) CAD-integrated design and analysis of shell structures, Dissertation
Acknowledgements
The authors would like to acknowledge the financial support provided by the University Research Council, College of Architecture and Environmental Design and The Fashion School at Kent State University. Our thanks are also given to TechSyleLAB at Kent State and InnovaKnits North Carolina for equipment/facility support, and the following students from Kent State University, who participated in the fabrication of BeTA Pavilion: Fred Wolfe, Haley DeRose, and Maame Amoah.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Davis-Sikora, D., Liu, R. & Ohrn-McDaniel, L. Form-finding and fabrication of BeTA pavilion: a bending-active biotensegrity textile assembly. SN Appl. Sci. 2, 2011 (2020). https://doi.org/10.1007/s42452-020-03363-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s42452-020-03363-0