
Abstract
The paper presents to design a vibratory mechanism for agricultural tillage operation. Agriculture tillage plays an important role for crop cultivation. There are different unit farm operations. Tillage is the mechanical manipulation of soil to obtain suitable soil condition for seed germination and growth. There are two basic soil manipulation processes such as primary and secondary. Draft consumption plays a vital role while performing the operations. Vibratory tillage concept was introduced since 1955 which results in low draft consumption. Tools oscillate in a particular mode of oscillation with certain amplitude and frequency along with the implement forward motion. The objective of the paper is to design an optimal four-bar mechanism for vibratory agricultural tillage operation to trace the desired experimental trajectory by the tillage tool in the field.
Similar content being viewed by others


1 Introduction
Agriculture and its allied sector play an important role in the Indian economy. Around 58% of the population is engaged in Indian agriculture as their principal occupation. Agriculture and its allied sectors contribute 14% to the nation’s gross domestic product (GDP) and play an important part in the growth and development of the country [1]. Thus, to meet the rising demand for food and to increase the income of those dependent on agriculture, it is important to accelerate the growth of Indian agriculture [2, 3]. Agricultural production has improved due to technological improvements and increased mechanization level. The average farm power availability (power available per unit area) has increased tremendously from 0.32 kW/hac (1965–1966) to 2.02 kW/hac (2013–2014). Thus, this concludes the strengthening of farm mechanization in our country [4, 5].
The major farm operations are tillage, irrigation, sowing and planting, use of fertilizers, plant protection, harvesting, threshing and post-processing operations [6]. But among them, agricultural tillage heads a major cost and energy expenditure among all farm operations. The energy consumption in tillage operation is next to irrigation. Also the percentage contribution of total mechanization level in tillage operation is only 30% [7, 8]. Thus, there is a need to design and develop such implements which consume less energy during the operation and can contribute better to the farming community.
Tillage is basically a mechanical manipulation of the soil to obtain suitable soil conditions for seed germination and its growth. It results in good physical condition of the soil. There are two basic soil manipulation operations such as primary and secondary tillage. Primary tillage is carried out with an initial depth of 25–30 cm. Mouldboard plough, disc plough and subsoiler are the types of implements under primary tillage. For better and finer soil operation, secondary operations are carried out once the primary operations are completed. Tillage operation depth of 10–15 cm is obtained during this operation. Cultivator, disc harrow and other miscellaneous equipment are the types of secondary tillage equipments used for the tillage purpose. Again, the tillage tools are classified into two types such as active and passive tools. Active tools are those in which the tool is powered one such as rotavator, and passive tools are those which are operated by a three-point linkage mechanism of the tractor such as primary and secondary implements [8, 9].
Oscillatory or vibratory tillage concept was introduced in 1955 [10]. Tools oscillate in a particular mode of oscillation with certain amplitude and frequency along with the implement forward motion. The motion with respect to implement reference system is longitudinal or transverse. Oscillation plane may be horizontal, vertical or at some inclination in three-dimensional space. There are several advantages of oscillation tools over non-oscillating ones [11,12,13]. Oscillating tools require less draft and traction requirement as compared to the non-oscillating ones [14,15,16].
The objective of the paper is to design an optimal vibratory mechanism for agricultural tillage operation and to observe the behaviour of the cutting tool trajectory. Kinematic synthesis is one such procedure which is used to identify the mechanism dimensions for a selected path, motion, etc. There are different methods to solve the problem. Among them, optimal synthesis is one such process which is used to identify the solutions for a given problem. Variety of nature-inspired algorithms are there, such as genetic algorithm (GA) [17, 18], particle swarm optimization (PSO) [19], teaching learning-based algorithm (TLBO) [20], whale optimization algorithm (WOA) [21] and many more, to solve the objective function which is a Euclidean distance [22] in our case that is selected path. Improved algorithms such as modified particle search algorithm (MPSO) [23] and hybrid teaching learning-based algorithm [24] are proposed for more refinement in the solution of the design variables. Thus, in this paper, an optimal four-bar crank-rocker mechanism is proposed for agricultural tillage operation for the desired path.
2 Materials and methods
In achieving the objective, the following points were considered such as optimization of the four-bar mechanism to derive the desired link lengths. The mechanism obtained is simulated in ADAMS to identify and examine the tool trajectory.
2.1 Tool trajectory
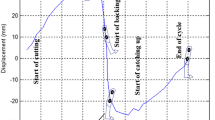
The tillage tool trajectory path is shown in Fig. 1. Vibratory tillage tool has the following phases according to [25, 26] and is as explained as follows:

Tool trajectory and orientation for vibratory tillage tool [25]
There are four important phases in one cycle of 0.3 s [25].
-
1.
Cutting
-
2.
Backing off
-
3.
Catching up
-
4.
End of the cycle
2.1.1 Cutting phase
Cutting tool penetrates into the soil and cuts. The phase is called as cutting phase.
2.1.2 Backing-off phase
Tool gets disengaged from the soil, and the front face of the cutting tool becomes inactive. This action is called backing-off phase.
2.1.3 Catching up and end of the cycle phase
Tool is oriented in its original position from where it is started and is called catching up and end of the cycle phase.
Thus, the aim is that the mechanism should follow the different stages during operation in the soil.
2.2 Desired and derived trajectories of four-bar mechanism
Four-bar mechanism showing desired and derived coupler trajectories is shown in Fig. 2 . A sinusoidal path is defined for the tool oscillatory tillage application for agricultural operation. The genetic algorithm technique is applied through the MATLAB optimization toolbox to get the optimal link dimensions which satisfy the tool trajectory. This technique is adopted only because an attempt is made to design a mechanism for experimental trajectory through optimization technique.

Four-bar mechanism showing desired and derived trajectories
The goal function is to minimize the error between the desired and derived trajectory. Euclidian distance error between derived (Pd) and desired (Pdesired) is computed to minimize the position error [27,28,29,30,31].
[Pdesired]i is the coupler trajectory indicated by the designer that coupler should position should meet the path. They can be written in coordinate system XY.
[Pderived]i is the set of position of the coupler of the designed mechanism for the set of input values.
According to the goal function, it can be expressed as
n = number of precision points.
Subject to: R2 + R3 < R1 + R4 (Grashof condition)
(Li ≤ xi ≤ Ui) (Lower and upper bound of design variables as R1, R2, R3, R4).
The coupler trajectory equation of four-bar mechanism can be written as follows:
The objective function can be written as:
where design vector \({\mathbf{X}} = \left[ {r1, \, r2, \, r3, \, r4, \, lx, \, ly,\varTheta_{2}^{1} ,\varTheta_{2}^{2} ,\varTheta_{2}^{3} ,\varTheta_{2}^{4} , \ldots \ldots \varTheta_{2}^{n} } \right].\)
3 Results and discussions
Optimal synthesis through path generation is performed, and the dimensions obtained are given as follows, as shown in Fig. 3. This means that the designed mechanism can reach the desired path as mentioned in the previous section. Crank is found to be 200 mm followed by connecting rod and rocker, as shown in Fig. 3. Cutting tool is attached to the coupler end to perform the desired operation that is tillage in this case.

Four-bar mechanism with link dimensions
3.1 Four-bar mechanism link dimensions
A four-bar mechanism is shown in Fig. 3. The link dimensions satisfying the tool trajectory as discussed in Sect. 2.2 with minimum error and constraint fulfilment are obtained through genetic algorithm technique. The following are:
-
R1 = Ground link = 432 mm
-
R2 = Crank = 200 mm
-
R3 = Coupler = 490 mm
-
R4 = Rocker = 425 mm
Figure 4 shows the cutting tool attached to the coupler end which is around 500 mm long. Oscillations are provided to the tool for vibratory soil cutting operation. Tool oscillates in the sinusoidal path which concludes that it will follow the different soil cutting phases as discussed in Sect. 2.1 which are in agreement with [25].

Four-bar mechanism model
3.2 Position analysis of the cutting tool in MSC ADAMS
Position analysis in MSC ADAMS is performed to understand the tool orientation and trajectory. Figure 5 shows the position versus time plot.

Path of tool in horizontal (Px) and resultant direction (P) in MSC ADAMS
The tool path is shown in Fig. 5 which is sinusoidal in nature. The tool in horizontal position reaches a maximum value of 260 mm as indicated in the figure. Velocity and acceleration are found to be 125 mm/s and 150 mm/s2, respectively, in soil cutting phases during the study. Crank is rotated continuously to observe and understand the tool trajectory, velocity and acceleration, respectively.
4 Model of the vibratory cultivator
A model is proposed using a four-bar mechanism for vibratory tillage operation. Cultivator is the tillage equipment used in which the mechanism is mounted below the frame. Figure 6 shows a vibratory cultivator implement.

Model in SolidWorks of vibratory cultivator
5 Conclusion
A four-bar mechanism is designed and proposed for the vibratory tillage operation. The mechanism can be used for the vibratory tillage operation in the soil which will follow the different soil cutting phases while operation due to its position analysis. Acceleration and velocity of the cutting tool are also identified during the study.
6 Future work
The further work is to fabricate the mechanism and mount it with the implement and test experimentally in the field for further confirmation and validation.
References
Report, Indian Agriculture Industry: an overview, Government of India, 2016
Report, Trends of agricultural mechanization in India CSAM policy brief, United Nations, 2014
Report, State of Indian Agriculture, New Delhi, 2012
Singh J (2005) Scope, progress and constraints of farm mechanization in India. Indian Council of Agricultural Research, New Delhi, pp 48–56
Singh S, Singh RS, Singh SP (2014) Farm power availability on Indian farms. Agric Eng Today 38:44–52
Soni P, Ou Y (2010) Agricultural mechanization at a glance selected country studies in Asia on agricultural machinery development. Report of United Nations Asian and Pacific Centre for Agricultural Engineering and Machinery (UNAPCAEM), pp 1–142
Singh G (2010) Optimisation of energy inputs for crop production in Punjab. Doctoral dissertation, Punjab Agricultural University, Ludhiana
Reicosky DC, Allmaras RR (2003) Advances in tillage research in North American cropping systems. J Crop Prod 8:75–125
Manian R, Kathirvel K (2001) Development and evaluation of an active-passive tillage machine. Agric Mech Asia Afr Latin Am 32:9–18
Gunn JT, Tramontini VN (1995) Oscillation of tillage implements. Agric Eng 36:725
Rao G, Chaudhary H, Sharma A (2018) Design and analysis of vibratory mechanism for tillage application. Open Agric 3(1):437–443
Rao G, Chaudhary H (2018) A review on effect of vibration in tillage application. In: IOP conference series: materials science and engineering, vol 377. IOP Publishing, pp 12–30
Rao G, Chaudhary H, Singh P (2018) Optimal draft requirement for vibratory tillage equipment using genetic algorithm technique. In: IOP conference series: materials science and engineering, vol 330. IOP Publishing, p 12
Hendrick JG, Buchele WF (1963) Tillage energy of a vibrating tillage tool. Trans ASAE 6:213–216
Johnson CE, Buchele WF (1969) Energy in clod-size reduction of vibratory tillage. Trans ASAE 12:371–374
Harrison HP (1973) Draft, torque, and power requirements of a simple vibratory tillage tool. Can Agric Eng 15:71–74
Kunjur A, Krishnamurty S (1997) Genetic algorithms in mechanism synthesis. J Appl Mech Robot 4(2):18–24
Acharyya SK, Mandal M (2009) Performance of EAs for four-bar linkage synthesis. Mech Mach Theory 44(9):1784–1794
Kennedy J (2011) Particle swarm optimization. In: Sammut C, Webb GI (eds) Encyclopedia of machine learning. Springer, Boston, MA, pp 760–766
Rao RV, Savsani VJ, Vakharia DP (2011) Teaching–learning-based optimization: a novel method for constrained mechanical design optimization problems. Comput Aided Des 43(3):303–315
Mirjalili S, Lewis A (2016) The whale optimization algorithm. Adv Eng Softw 95:51–67
Chi Yeh H (1966) A general method for the optimum design of mechanisms. J Mech 1(3–4):301–313
Pathak VK, Singh AK (2017) Effective form error assessment using improved particle swarm optimization. MAPAN 32(4):279–292
Singh R, Chaudhary H, Singh AK (2017) A new hybrid teaching–learning particle swarm optimization algorithm for synthesis of linkages to generate path. Sadhana 42(11):1851–1870
Shahgoli G, Fielke J, Desbiolles J, Saunders C (2010) Optimising oscillation frequency in oscillatory tillage. Soil Tillage Res 106:202–210
Razzaghi E, Sohrabi Y (2016) Vibratory soil cutting a new approach for the mathematical analysis. Soil Tillage Res 159:33–40
Erdman AG, Sandor GN, Kota S (1991) Mechanism design-analysis and synthesis. Prentice Hall, Englewood Cliffs
Singh R, Chaudhary H, Singh AK (2017) Defect-free optimal synthesis of crank-rocker linkage using nature-inspired optimization algorithms. Mech Mach Theory 116:105–122
Singh R, Chaudhary H, Singh AK (2018) A novel gait based synthesis procedure for the design of 4-bar exoskeleton with natural trajectories. J Orthop Transl 12:6–15
Cabrera JA, Simon A, Prado M (2002) Optimal synthesis of mechanisms with genetic algorithms. Mech Mach Theory 37:1165–1177
Singh R, Chaudhary H, Singh AK (2016) Optimal synthesis of crank-rocker linkage for exoskeleton knee. In: International Conference on IEEE conference in recent advances and innovations in engineering (ICRAIE), pp 1–5
Acknowledgements
Ph.D. scholarship granted by MHRD, Government of India, to the first author is highly acknowledged.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The author(s) declare that they have no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Gowripathi Rao, N.R.N.V., Chaudhary, H. & Sharma, A.K. Optimal design and analysis of oscillatory mechanism for agricultural tillage operation. SN Appl. Sci. 1, 1003 (2019). https://doi.org/10.1007/s42452-019-1025-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s42452-019-1025-z