
Abstract
Background
Compared to completely control systems, super-articulated mechanical systems (SAMS) are controlled under-actuated systems where the dimensions of the control input space are less than the magnitudes of the output.
Purpose
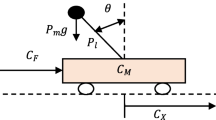
Hence, the major aim of this study is developing an innovative cart–seesaw system which is manipulated by electrical servo actuators and also improving balancing methodology for such apparatus. Controlling the mobile cart on the seesaw is exceptionally hard because it is an under-actuated machinery.
Methods
With the purpose of the stabilization, the famous PID control scheme will be based on the genetic algorithm (GA) to pursue the main optimum parameters, and then enhancement of a fuzzy logic approach to stabilize the nonlinear model. The final controller will be completed by treating an intelligent fuzzy logic controller (FLC) based on adaptive neuro-fuzzy inference system (ANFIS) with GA tuning approach to speed up the effectiveness of controller construction. The knowledge base of fuzzy system was subsequently built on PID performance-related information.
Results
Experimentation shows that applying the suggested new cart–seesaw system (CSS) shows better functioning than the previous pneumatic cart–seesaw (PCS) system in tracking and balancing execution. Furthermore, the balancing approach presented in this paper meaningfully indicates the valuableness of the suggested intelligent controller in suppression oscillation of the seesaw.
Conclusion
The investigation of the proposed system will be useful for control course apparatus and also worthy for the entertainment device.












Similar content being viewed by others


References
Uran S, Jezernik K (2002) Control of a ball and beam like mechanism. In: Proceedings of the 7th international workshop on advanced motion control, Maribor, Slovenia, 3–5 July 2002, pp 376-380
Wang G, Tian Y, Hong W (2000) Stabilization and equilibrium control of super articulated ball and beam system. In: Proceedings of the 3rd World congress on intelligent control and automation, Hefei, China, 28 June–2 July 2000, pp 3290–3293
Seto S, Baillieul J (1994) Control problems in super-articulated mechanical systems. IEEE Trans Automat Control 39(12):2442–2453
Aguilar-Ibáñez C, Sira-Ramírez H (2007) A linear differential flatness approach to controlling the Furuta pendulum. IMA J Math Control Inf 24(1):31–45
Aguilar-Ibáñez C, Sira-Ramírez H, Suárez-Castañón MS (2011) A flatness-based controller for the stabilization of the inverted pendulum. Math Prob Eng Article ID 659685. https://doi.org/10.1155/2011/659685
Keshmiri M, Jahromi AF, Mohebbi A, Amoozgar MH, Xie WF (2012) Modeling and control of ball and beam system using model based and non-model based control approaches. Int J Smart Sens Intell Syst 5(1):14–35
Ho MT, Tu YW, Lin HS (2009) Controlling a ball and wheel system using full-state-feedback linearization—a testbed for nonlinear control design. IEEE Control Syst Mag 29(5):93–101
Lin J, Huang CJ, Chang J, Wang SW (2010) Active-passive vibration absorber of beam-cart-seesaw system with piezoelectric transducers. J Sound Vib 329(20):4109–4123
Lin J, Guo SY, Chang J (2011) Fuzzy coordinator compensation for balancing control of cart-seesaw system. J Sound Vib 330(26):6296–6310
Lin J, Ding YS, Chang J (2014) Balancing and swinging-up control for cart-pendulum-seesaw system by decomposed fuzzy coordination control. J Vib Control 20(6):925–942
Chung BM, Lee JW, Joo HH, Lim YK (2000) Hybrid fuzzy learning controller for an unstable nonlinear system. Int J Korean Soc Precis Eng 1(1):79–83
Ramos LE, Castillo-Toledo B, Negrete S (1988) Nonlinear regulation of a seesaw-inverted pendulum. Proc IEEE Int Conf Control Appl Trieste Italy 1–4:1399–1403
Subbotin MV (2004) Balancing an inverted pendulum on a seesaw, Project Report, University of California, Santa Barbara, USA
Lin CT, George LCS (1999) Neural fuzzy systems. Prentice Hall, USA
Kalaivani R, Lakshmi P, Rajeswari K (2015) An improved type-2 fuzzy logic approach based sliding mode controller for vehicle active suspension system. J Vib Eng Technol 3(4):431–446
Treetrong J, Sinha JK, Gu F, Ball A (2014) An investigation of genetic algorithm based motor parameter estimation for condition monitoring. J Vib Eng Technol 2(2):97–115
Afkar A, Marzbanrad J, Amirirad Y (2015) Modeling and semi active vertical vibration control of a GA optimized 7DoF driver model using an MR damper in a seat suspension system. J Vib Eng Technol 3(1):37–48
Afkar A, Marzbanrad J, Amirirad Y (2016) Mode control optimized by genetic algorithm for building model. J Vib Eng Technol 4(1):37–48
Jang JSR (1993) ANFIS: adaptive-network-based fuzzy inference system. IEEE Trans Syst Man Cybernet 23(3):665–685
Lin J, Zheng YB (2012) Vibration suppression control of smart piezoelectric rotating truss structure by parallel neuro-fuzzy control with genetic algorithm tuning. J Sound Vib 331(16):3677–3694
Lin J (2005) A vibration absorber of smart structures using adaptive networks in hierarchical fuzzy control. J Sound Vib 287(4–5):683–705
Acknowledgements
The authors would like to thank the National Science Council of the Republic of China, Taiwan for financially supporting this research under Contract No. NSC 96-2221-E-231-017-MY3.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Lin, J., Lai, H.Y. & Chang, J. Stabilization and Equilibrium Control for Electrically Cart–Seesaw Systems by Neuro-fuzzy Approach. J. Vib. Eng. Technol. 6, 1–11 (2018). https://doi.org/10.1007/s42417-018-0004-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42417-018-0004-9