
Abstract
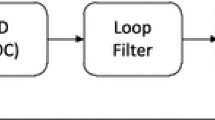
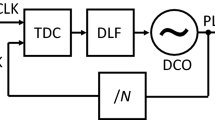
Due to instability of a normal pseudolite, it is vital to ensure that the signal transmitted by a pseudolite is stable. In this paper, a carrier frequency self-alignment closed-loop system is designed for enhancing the stability of a transceiver pseudolite. Carrier frequency feedback is used to compensate for interference from external noise, so that it can make the signal more stable. This system is able to be stable via the related root locus and bode diagram analysis. PID compensation is used to enhance transient-state and static-state performances of carrier frequency self-alignment closed-loop system. According to MATLAB Simulink simulation, carrier frequency self-alignment is achievable and it can suppress external noise interference, which makes the signal more stable.






















Similar content being viewed by others

References
Chen Y, Zhan X, Tu J (2018) A SVM based GNSS performance assessment with reliable vulnerability degree model. J Aeronaut Astronaut Aviat 50(3):301–314
Ma C, Wang J, Chen J (2017) Beidou compatible indoor positioning system architecture design and research on geometry of pseudolite. In: Fourth International Conference on Ubiquitous Positioning, Indoor Navigation and Location Based Services, pp. 176–181
Lee HK, Wang J, Rizos C, Tsujii T (2005) Augmenting GPS by ground-based pseudolite signals for airborne surveying applications. Surv Rev 38(296):88–99
Lee JE, Lee S (2010) Indoor initial positioning using single clock pseudolite system. In: International conference on information and communication technology convergence, pp 575–578
Liu B, Zhan X, Liu M (2018) GNSS/MEMS IMU ultra-tightly integrated navigation system based on dual-loop NCO control method and cascaded channel filters. IET Radar Sonar Navig 12(11):1241–1250
Xie G (2017) Principles of GPS and receiver design. Publishing House of Electronics Industry, Beijing
Kaplan ED, Hegarty CJ (2006) Understanding GPS: principles and applications. ARTECH HOUSE, London
Ding, J, Zhibin L, Lin Z (2015) GNSS Carrier Tracking Loop With Loop Gain Control Factor. In: Fifth international conference on instrumentation and measurement, computer, communication and control, IEEE, pp 1475–1480
Tahir M, Khurram UM, Salman A (2015) GNSS carrier tracking loop: stability analysis and some improvements. In: IEEE, pp 16–21
Wang J, Gu S (2009) Principles of automation control. Tsinghua University, Beijing
Tan L (2011) The design and FPGA implementation of GPS baseband processor. Vol. Master, South China University of Technology, Guangzhou, China, pp 41–61
Rusu-Casandra A, Marghescu I, Lohan ES (2011) Estimators of the indoor channel for GPS-based pseudolite signal. In: International symposium on electronics and telecommunications, pp 233–236
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Wu, T., Zhan, X. & Zhang, X. Transceiver pseudolite carrier frequency self-alignment closed-loop system. AS 3, 41–52 (2020). https://doi.org/10.1007/s42401-019-00041-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42401-019-00041-x