
Abstract
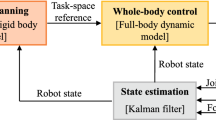
This study proposes an integrated planning and control framework for achieving three-dimensional robust and dynamic legged locomotion over uneven terrain. The proposed framework is composed of three hierarchical layers. The high-level layer is a state-space motion planner designing highly dynamic locomotion behaviors based on a reduced-order robot model. This motion planner incorporates two robust bundles, named as invariant and recoverability bundles, which quantify analytical state-space deviations for robust planning design. The low-level layer is a model-based trajectory tracking controller capable of robustly realizing the planned locomotion behaviors. This controller is synthesized based on full-order hybrid dynamic modeling, model-based state feedback control, and Lyapunov stability analysis. The planning and control layers are concatenated by a middle-level trajectory generator that produces nominal behaviors for a full-order robot model. The proposed framework is validated through flat and uneven terrain walking simulations of a three-dimensional bipedal robot.







Similar content being viewed by others


References
Ames, A.D.: Human-inspired control of bipedal walking robots. IEEE Trans. Autom. Control 59(5), 1115–1130 (2014)
Biemond, J.J.B., van de Wouw, N., Heemels, W.P.M.H., Nijmeijer, H.: Tracking control for hybrid systems with state-triggered jumps. IEEE Trans. Autom. Control 58(4), 876–890 (2012)
Branicky, M.S.: Multiple Lyapunov functions and other analysis tools for switched and hybrid systems. IEEE Trans. Autom. Control 43(4), 475–482 (1998)
Branicky, M.S., Borkar, V.S., Mitter, S.K.: A unified framework for hybrid control: model and optimal control theory. IEEE Trans. Autom. Control 43(1), 31–45 (1998)
Chestnutt, J., Lau, M., Cheung, G., Kuffner, J., Hodgins, J., Kanade, T.: Footstep planning for the honda asimo humanoid. In: Proceedings of IEEE International Conference on Robotics and Automation, pp. 629–634 (2005)
Chevallereau, C., Grizzle, J.W., Shih, C.-L.: Asymptotically stable walking of a five-link underactuated 3-D bipedal robot. IEEE Trans. Robat 25(1), 37–50 (2009)
Da, X., Grizzle, J.: Combining trajectory optimization, supervised machine learning, and model structure for mitigating the curse of dimensionality in the control of bipedal robots. arXiv:1711.02223 (2017)
Dai, H., Valenzuela, A., Tedrake, R.: Whole-body motion planning with centroidal dynamics and full kinematics. In: Proceedings of IEEE international conference on humanoid robots, pp. 295–302 (2014)
Englsberger, J., Ott, C., Albu-Schaffer, A.: Three-dimensional bipedal walking control based on divergent component of motion. IEEE Trans. Robat. 31(2), 355–368 (2015)
Farshidian, F., Neunert, M., Winkler, A. W., Rey, G., Buchli, J.: An efficient optimal planning and control framework for quadrupedal locomotion. In: Proceedings of IEEE international conference on robotics and automation, pp. 93–100 (2017)
Feng, S., Whitman, E., Xinjilefu, X., Atkeson, C.G.: Optimization-based full body control for the darpa robotics challenge. J. Field Robot. 32(2), 293–312 (2015)
Forni, F., Teel, A.R., Zaccarian, L.: Follow the bouncing ball: global results on tracking and state estimation with impacts. IEEE Trans. Autom. Control 58(6), 1470–1485 (2013)
Frazzoli, E.: Robust hybrid control for autonomous vehicle motion planning. PhD thesis, Massachusetts Institute of Technology (2001)
Galeani, S., Menini, L., Potini, A.: Robust trajectory tracking for a class of hybrid systems: An internal model principle approach. IEEE Trans. Autom. Control 57(2), 344–359 (2011)
Grizzle, J.W., Abba, G., Plestan, F.: Asymptotically stable walking for biped robots: analysis via systems with impulse effects. IEEE Trans. Autom. Control 46(1), 51–64 (2001)
Grizzle, J.W., Chevallereau, C., Sinnet, R.W., Ames, A.D.: Models, feedback control, and open problems of 3d bipedal robotic walking. Automatica 50(8), 1955–1988 (2014)
Gu, Y., Yao, B., Lee, C.S.G.: Bipedal gait recharacterization and walking encoding generalization for stable dynamic walking. In: Proceedings of IEEE international conference on robotics and automation, pp. 1788–1793 (2016)
Gu, Y., Yao, B., Lee, C.G.: Straight-line contouring control of fully actuated 3-d bipedal robotic walking. In: Proceedings of American control conference, pp. 2108–2113 (2018)
Hauser, K., Bretl, T., Latombe, J.-C., Harada, K., Wilcox, B.: Motion planning for legged robots on varied terrain. Int. J. Robot. Res. 27(11–12), 1325–1349 (2008)
Herr, H., Popovic, M.: Angular momentum in human walking. J. Exp. Biol. 211(4), 467–481 (2008)
Hopkins, M.A., Hong, D.W., Leonessa, A.: Compliant locomotion using whole-body control and divergent component of motion tracking. In: Proceedings of IEEE international conference on robotics and automation, pp. 5726–5733 (2015)
Hurst, J.W., Rizzi, A.A.: Physically variable compliance in running. Climbing and Walking Robots. Springer, New York, pp. 123–133 (2005)
Kajita, S., Kanehiro, F., Kaneko, K., Fujiwara, K., Harada, K., Yokoi, K., Hirukawa, H.: Biped walking pattern generation by using preview control of zero-moment point. In: Proceedings of IEEE international conference on robotics and automation, pp. 14–19 (2003)
Kajita, S., Kanehiro, F., Kaneko, K., Fujiwara, K., Harada, K., Yokoi, K., Hirukawa, H.: Biped walking pattern generation by using preview control of zero-moment point. In: IEEE international conference on robotics and automation, pp. 1620–1626 (2003)
Khalil, H.K.: Nonlinear Control. Prentice Hall, Upper Saddle River (1996)
Koolen, T., De Boer, T., Rebula, J., Goswami, A., Pratt, J.: Capturability-based analysis and control of legged locomotion, part 1: Theory and application to three simple gait models. Int. J. Robot. Res. 31(9), 1094–1113 (2012)
Koolen, T., Posa, M., Tedrake, R.: Balance control using center of mass height variation: limitations imposed by unilateral contact. In: Proceedings of IEEE-RAS international conference on humanoid robots, pp. 8–15 (2016)
Kuo, A.D.: Energetics of actively powered locomotion using the simplest walking model. J. Biomech. Eng. 124(1), 113–120 (2002)
Kuo, A.D., Zajac, F.E.: Human standing posture: multi-joint movement strategies based on biomechanical constraints. Progr. Brain Res. 97, 349–358 (1992)
Liu, J., Ozay, N., Topcu, U., Murray, R.M.: Synthesis of reactive switching protocols from temporal logic specifications. IEEE Trans. Autom. Control 58(7), 1771–1785 (2013)
Luo, J., Su, Y., Ruan, L., Zhao, Y., Kim, D., Sentis, L., Fu, C.: Robust bipedal locomotion based on a hierarchical control structure. Robotica 37(10), 1750–1767 (2019)
Lygeros, J., Tomlin, C., Sastry, S.: Hybrid systems: modeling, analysis and control. Preprint (2008)
Majumdar, A.: Robust online motion planning with reachable sets. Master thesis, Massachusetts Institute of Technology (2013)
Menini, L., Tornambè, A.: Asymptotic tracking of periodic trajectories for a simple mechanical system subject to nonsmooth impacts. IEEE Trans. Autom. Control 46(7), 1122–1126 (2001)
Morris, B., Grizzle, J.W.: Hybrid invariant manifolds in systems with impulse effects with application to periodic locomotion in bipedal robots. IEEE Trans. Autom. Control 54(8), 1751–1764 (2009)
Nguyen, Q., Agrawal, A., Da, X., Martin, W.C., Geyer, H., Grizzle, J.W., Sreenath, K.: Dynamic walking on randomly-varying discrete terrain with one-step preview. In Robotics, science and systems (2017)
Pratt, J., Koolen, T., De Boer, T., Rebula, J., Cotton, S., Carff, J., Johnson, M., Neuhaus, P.: Capturability-based analysis and control of legged locomotion, part 2: application to M2V2, a lower-body humanoid. Int. J. Robot. Res. 31(10), 1117–1133 (2012)
Ramos, O.E., Hauser, K.: Generalizations of the capture point to nonlinear center of mass paths and uneven terrain. In: Proceedings of IEEE-RAS international conference on humanoid robots, pp. 851–858 (2015)
Saccon, A., van de Wouw, N., Nijmeijer, H.: Sensitivity analysis of hybrid systems with state jumps with application to trajectory tracking. In: Proceedings of IEEE conference on decision and control, pp. 3065–3070 (2014)
Schouwenaars, T., Mettler, B., Feron, E., How, J.P.: Robust motion planning using a maneuver automation with built-in uncertainties. Proc. Am. Control Conf. 2003, 2211–2216 (2003)
Westervelt, E.R., Grizzle, J.W., Koditschek, D.E.: Hybrid zero dynamics of planar biped walkers. IEEE Trans. Autom. Control 48(1), 42–56 (2003)
Winter, D.A.: Human balance and posture control during standing and walking. Gait Posture 3(4), 193–214 (1995)
Yao, B., Al-Majed, M., Tomizuka, M.: High-performance robust motion control of machine tools: an adaptive robust control approach and comparative experiments. IEEE/ASME Trans. Mechatron. 2(2), 63–76 (1997)
Zafar, M., Hutchinson, S., Theodorou, E.A.: Hierarchical optimization for whole-body control of wheeled inverted pendulum humanoids. In: 2019 International conference on robotics and automation (ICRA), IEEE, pp. 7535–7542 (2019)
Zhao, Y., Fernandez, B., Sentis, L.: Robust optimal planning and control of non-periodic bipedal locomotion with a centroidal momentum model. Int. J. Robot. Res. 36(11), 1211–1243 (2017)
Zhao, Y., Sentis, L.: A three dimensional foot placement planner for locomotion in very rough terrains. In: Proceedings of IEEE international conference on humanoid robots, pp. 726–733 (2019)
Zhao, Y., Topcu, U., Sentis, L.: High-level reactive planner synthesis for unified legged and armed locomotion in constrained environments. In: IEEE conference on decision and control, pp. 6557–6564 (2016)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix A: Tuple notations in Definition 1
Appendix A: Tuple notations in Definition 1
To maintain the notation clarity, we remove the subscript ’r’ which denotes the “reduced-order” model. The tuple components of the robust hybrid automaton in Definition 1 are defined as
\({\mathcal {Q}}\)—set of discrete states. \({\mathcal {Q}} :=\{q_i\}, i = 1, \ldots , n\);
\({\mathcal {X}}\)—set of spaces of continuous states, \({x}_q\), \({\mathcal {X}}=\cup _{q}^{}{\mathcal {X}}_q\). \({\mathcal {X}}_q :=\{{x}_q \in {\mathbb {R}}^{d_q}, q \in {\mathcal {Q}}\}\);
\({\Sigma }\)—system dynamics, \(\Sigma =\cup _{q}^{}\Sigma _q\), each described by vector field \({\mathcal {F}}_q \), with \({\mathcal {F}}_q:{\mathcal {X}}_q \rightarrow T_{{\mathcal {X}}_q} \subset {\mathbb {R}}^{d_q}\), where \(T_{{\mathcal {X}}_q}\) is the tangent bundle of \({\mathcal {X}}_q\);
\(\mathcal {W}\)—disturbance input \({w}\) space, \({w}\in \mathcal {W}\subseteq {\mathbb {R}}^{n_\mathrm{dist}}\);
\({\mathcal {U}}\)—control inputs space \({\mathcal {U}} :=\{{u}_q, q \in {\mathcal {Q}}\}\). \({\mathcal {U}} = \{{u}_c\} \cup \{{u}_d\}\) where \({u}_c, {u}_d\) are continuous and discrete control inputs, respectively;
\({\mathcal {I}}\)—set of allowable initial conditions, \({\mathcal {I}} :=\{\zeta _0\} \times \{q\} \times \{{x}_q\}, \; q \in {\mathcal {Q}}\);
\({\mathcal {D}}\)—domain, \({\mathcal {D}}(q) :=\{{x}_q \}\);
\({\mathcal {R}}\)—recoverability set, \({\mathcal {R}} :=\{{\mathcal {R}}_q, q \in {\mathcal {Q}}\}\);
\({\mathcal {B}}\)—invariant set, \({\mathcal {B}} :=\{{\mathcal {B}}_q, q \in {\mathcal {Q}}\}\);
\(\mathcal {E}\)—edges, \(\mathcal {E}_{i,j}=\mathcal {E}(q_{i}, q_{j}):{\mathcal {Q}}\times {\mathcal {Q}}\);
\(\mathcal {G}(q_{i}, q_{j})\)—guard, \(\mathcal {G}(q_{i}, q_{j}) :=\{G_{q_i}, \; q_i \in {\mathcal {Q}}, q_j \in {\mathcal {Q}}\} \subset {\mathcal {X}}_{q_i}\);
\({\mathcal {T}}(q_i, q_j)\)—jump termination set, \({\mathcal {T}}(q_i, q_j) :=\{T_{q_j}, q_i \in {\mathcal {Q}}, q_j \in {\mathcal {Q}}\} \subset {\mathcal {X}}_{q_j}\);
One thing worthy to concern is the well-posedness Frazzoli (2001) of phase-space manifolds. Since our phase-space dynamics are piece-wise continuous, the maneuvers are a finite set of primitives with a finite time durations and the well-posedness of phase-space manifolds is guaranteed for our case.
Rights and permissions
About this article

Cite this article
Zhao, Y., Gu, Y. A non-periodic planning and control framework of dynamic legged locomotion. Int J Intell Robot Appl 4, 95–108 (2020). https://doi.org/10.1007/s41315-020-00122-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s41315-020-00122-7