
Abstract
In this manuscript, a fractional order SEIR model with vaccination has been proposed. The positivity and boundedness of the solutions have been verified. The stability analysis of the model shows that the system is locally as well as globally asymptotically stable at disease-free equilibrium point \({E}_{0}\) when \({\mathfrak{R}}_{0}\)< 1 and at epidemic equilibrium \({E}_{1}\) when \({\mathfrak{R}}_{0}> 1\). It has been found that introduction of the vaccination parameter \(\eta \) reduces the reproduction number \({\mathfrak{R}}_{0}\). The parameters are identified using real-time data from COVID-19 cases in India. To numerically solve the SEIR model with vaccination, the Adam-Bashforth-Moulton technique is used. We employed MATLAB Software (Version 2018a) for graphical presentations and numerical simulations.. It has been observed that the SEIR model with fractional order derivatives of the dynamical variables is much more effective in studying the effect of vaccination than the integral model.
Similar content being viewed by others


Introduction
Since its inception, human race has encountered and battled deadly epidemics and pandemics due to mass infection caused by viruses, for example SARS, HIV, AIDS, H5N1,, Chicken pox and Small pox, etc. Modelling and analysis of such epidemic behavior has been an integral part of research in the areas of Biological and Physical Sciences [1,2,3,4,5]. Though the\(SIS\), \(SIR\) or \(SIRS\) models [6, 7] have been employed to study illness transmission, the incubation time has been thought to be insignificant. Hence, a new kind of model called \(SEIR\) was introduced. Similar other factors may influence the population dynamics of certain infectious diseases. Vaccination is one such component that plays a important role in the prevention and control of such illnesses. In 2006, Gumel, McCluskey and Watmough [8] considered an \(SVEIR\) model to discuss the significance of an anti \(SARS\) vaccine, where V accounts for the vaccinated population. In 2016, Wang et.al [9] studied the stability of an \(SVEIR\) model. However, both the studies and many others, were guided by integral order differential operators of the dynamical variables. In this communication we have considered Caputo order fractional derivatives of a four compartmentalized population with vaccination.
At present times an extensive investigation [10,11,12,13,14,15,16,17,18,19,20,21,22,23] of the spread of the highly contagious Coronavirus disease with alarming fatality rate is being carried out. Different models exist in epidemiology to forecast and explain the complexities of an epidemic. Kermack and Mckendrick developed one such epidemic model in 1927 [28]. Tang et al. [16] proposed a compartmental deterministic model that took illness progression, patient epidemiological status, and prevention approaches into account. The \(SIR\) model is most widely used for analyzing and forecasting disease progression adopted in 1991 by Anderson et.al [29]. However, all these models were based on integral order derivatives.
Differential equations using fractional differential operators have been found to be useful in depicting epidemic scenarios for a variety of infectious diseases [26,27,28,29,30]. Several approaches for generating precise and approximate solutions to fractional order differential equations have been developed as a result of extensive research [31,32,33,34]. Several fractional operators have been devised to explore the dynamics of epidemic systems, including Caputo–Fabrizio, Riemann–Liouville, Caputo, Hadamard, Atangana–Baleanu, Katugampola, and others. We employed the Caputo operator to examine the dynamics of COVID-19, since it has a nonlocal and nonsingular exponential kernel [35,36,37,38,39,40]. The dynamical and nonstandard computational study of a heroin epidemic model is discussed by Raza et al. [41]. For more related publications, see Refs. [42,43,44,45,46,47,48,49,50,51].
As stated earlier, vaccination is a crucial method for eradicating infectious diseases. Covid-19 vaccination has recently been confirmed as a successful method of preventing the spread of the disease. Theoretical findings indicate that the covid-19 vaccination approach differs from traditional vaccination methods in terms of achieving disease eradication at low vaccination doses. India started administering COVID-19 vaccines on January 16, 2021. 170,153,432 doses have been administered in this country as of 10 May 2021 [52, 53]. Covishield (a Serum Institute of India-manufactured version of the Oxford–AstraZeneca vaccine) and Covaxin, which were utilised in India at the start of the programme, are now licenced vaccinations (developed by Bharat Biotech). In April 2021, Sputnik V has been licenced as a third vaccination, with delivery beginning in late May 2021.
The objective of the current work is:
-
1.
The model's dynamical behavior and stability are investigated.
-
2.
The Basic Reproduction Number and Equilibrium Points are calculated.
-
3.
Numerical simulation to confirm the results and regulate the spread of COVID-19.
-
4.
In India, the model was validated and discussed in the COVID-19 instances.
The manuscript is structured as follows: Sect. 2 discusses a mathematical model with a fractional order derivative. Section 3 is devoted to the discussion of stability analysis and stability criterion of the Model. For the \(SEIR\) model with vaccination parameter, we use the Adam-Bashforth-Moulton scheme in Sect. 4. The numerical simulation and discussion are given in Sect. 5 using MATLAB. The conclusion of the paper is presented in Sect. 6.
Formulation
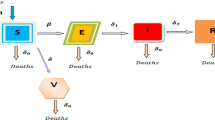
At time \(t \ge 0\), the whole population \((N)\) is divided into four classes, namely, the susceptible \((S)\), the exposed \((E)\), the infected \((I)\) and the recovered \((R)\) class. Thus
The \(SEIR\) model with integer order [54, 55] is expressed as follows:
where \(\lambda \): birth rate of susceptible individuals, \(\beta \): contact rate from \(S\) to \(E\), \(\mu \): death rate, η: vaccination rate, \(k\): progression rate exposed to infected, \(\gamma \): recovery rate.
Let us go through some fundamental definitions of Caputo fractional operators [35, 56,57,58,59] for dynamical analysis.
Definition 1
The Caputo integral of the function \(g : {\mathbb{R}}^{+}\to {\mathbb{R}}\) is defined by
where \(\Gamma ( . )\) denotes the Gamma function and \(0 < {\alpha }\le 1\) shows the fractional order parameter.
Definition 2
The Caputo derivative with order \(0<{\alpha }\le 1\) is defined by
where \(n-1< \alpha <n\).
Definition 3
Let \(g\in C\left[a,b\right]\) with \(a<b,\) and \(0<{\alpha }\le 1.\) The fractional derivative in Caputo type is defined by
where \(M\left(\alpha \right)\) represents the normalization function with \(M\left(0\right)=M\left(1\right)=1\).
Definition 4
Let \({}^{C}{D}_{t}^{\alpha } \left(g\left(t\right)\right)\) be a piecewise continuous on \(\left[{t}_{0},\infty \right].\) Then,
where \(L ({}^{C}{D}_{t}^{\alpha } \left(g\left(t\right)\right))\) denotes the Laplace transform of \(g\left(t\right).\)
Definition 5
For \({a}_{1},{a}_{2}\in {\mathbb{R}}^{+}\) and \(A\in {\mathbb{C}}^{n \times n}\) where \({\mathbb{C}}\) denotes complex plane, then
Lemma 1
Let us consider the fractional order system:
with \(0<{\alpha }<1, Y\left(t\right)=({y}^{1}\left(t\right),{y}^{2}\left(t\right),\dots , {y}^{n}\left(t\right))\) and\(\Phi \left(Y\right) :\left[{t}_{0},\infty \right]\to {\mathbb{R}}^{n\times n}\). For calculate the equilibrium points, we have \(\Phi \left(\mathrm{Y}\right)=0\). These equilibrium points are locally asymptotically stable iff each eigen value \({\lambda }_{j}\) of the Jacobian matrix \(J\left(Y\right)=\frac{\partial ({\Phi }_{1},{\Phi }_{2},\dots , {\Phi }_{n})}{\partial ({y}^{1},{y}^{2}, \dots , {y}^{n})}\) determined at the equilibrium points satisfy\(\left|\mathrm{arg}({\lambda }_{j})\right|>\frac{{\alpha }\pi }{2}\).
Lemma 2
Let \(g\left(t\right)\in {\mathbb{R}}^{+}\) be a differentiable function. Then,
We analyze the \(SEIR\) model with vaccination in this presentation, utilizing the Caputo operator of order \(0<\alpha \le 1\).
The initial conditions are
Non-negativity and boundedness of Solutions
Proposition
The region \(\Omega =\{(S,E,I,R) \in {\mathbb{R}}^{4} : 0 < N \le \frac{\lambda }{\mu } \}\) is non-negative invariant for the model (2.8) for \(t\ge 0\).
Proof
We have.
-
$${}^{C}{D}_{t}^{\alpha } N\left(t\right)= \Lambda -\mu N(t)$$
-
$${}^{C}{D}_{t}^{\alpha } N(t)+\mu N (t) = \Lambda . $$(2.10)
Taking Laplace transform, we have
$${p}^{\alpha }L\left(N\left(t\right)\right)-{p}^{\alpha -1} N\left(0\right)+ \mu L\left(N\left(t\right)\right)=\frac{\Lambda }{p}$$ -
$$\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ L\left(N\left(t\right)\right)\left({p}^{\alpha +1} + \mu \right)= {p}^{\alpha } N\left(0\right)+ \Lambda $$
-
$$L\left(N\left(t\right)\right)= \frac{{p}^{\alpha } N\left(0\right) + \Lambda }{{p}^{\alpha +1} + \mu }=\frac{{p}^{\alpha } N\left(0\right)}{{p}^{\alpha +1} + \mu }+\frac{\Lambda }{{p}^{\alpha +1} + \mu }.$$(2.11)
Applying inverse Laplace transform, we get
According to Mittag–Leffler function,
Hence, \(N\left(t\right)=\left(N\left(0\right)-\frac{\Lambda }{{\mu }_{0} }\right) {E}_{\alpha , 1}\left(-\mu {t}^{\alpha }\right)+\frac{\Lambda }{\mu }\).
As a result, the functions S, E, I, and R are all non-negative.
Basic Reproduction Number
The basic reproduction number \({\mathfrak{R}}_{0}\) may be obtained from the maximum eigen value of the matrix \(F{V}^{-1}\) where,
\(F\) = \(\left[\begin{array}{cc}0& \frac{\beta \lambda }{\mu +\eta }\\ 0& 0\end{array}\right]\) and \(V\) = \(\left[\begin{array}{cc}\mu +k& 0\\ -k& \mu +\gamma \end{array}\right]\).
Stability Analysis
The system's equilibrium may be found by solving the system (2.8). The disease-free equilibrium points \({E}_{0}\) and the epidemic equilibrium point \({E}_{1}\) of the system (2.8) are obtained from
The model (2.8) has two equilibrium points namely, \({E}_{0}\) = (\(\frac{\lambda }{\mu +\eta } , 0, 0, \frac{\lambda \eta }{\mu (\mu +\eta )}\)) and\({E}_{1} = ({S}^{*},{E}^{*},{I}^{*},{R}^{*})\),
where \({S}^{*}\) = \(\frac{\left(\mu +\gamma \right)(\mu +k)}{\beta k}\), \({E}^{*}=\frac{\left(\mu +\gamma \right){I}^{*}}{k}\), \({I}^{*}\) = \(\frac{\lambda k}{\left(\mu +\gamma \right)(\mu +k)}-\frac{\left(\mu +\eta \right)}{\beta }\),\({R}^{*}\) = \(\frac{\upgamma {I}^{*}+\eta {S}^{*}}{\upmu }\).
The Jacobian matrix \(( J\)) of the model (2.8) at \((S, E, I, R)\) is given by.
3.1 Theorem
When \({\mathfrak{R}}_{0}\)< 1, the point \({E}_{0}\) of the system (2.8) is locally asymptotically stable, and when \({\mathfrak{R}}_{0}> 1\), it is unstable.
Proof
The Jacobian matrix \(J\) at \({E}_{0}\) becomes
\(J\)(\({E}_{0}\)) = \(\left[\begin{array}{ccc}-\mu -\eta & 0& -\begin{array}{cc}\frac{\beta \lambda }{\mu +\eta }&\quad 0\end{array}\\\quad 0& -(\mu +k)&\quad \begin{array}{cc}\frac{\beta \lambda }{\mu +\eta }&\quad 0\end{array}\\ \begin{array}{c}0\\ 0\end{array}&\quad \begin{array}{c}k\\ 0\end{array}&\quad \begin{array}{cc}\begin{array}{c}-(\mu + \gamma )\\ \gamma \end{array}&\quad \begin{array}{c}0\\ -\mu \end{array}\end{array}\end{array}\right]\).
Now \((-\mu-\eta \)), \(-\mu \), \(-(\mu +\upgamma )\) and (\(\mu +k\)) (\({\mathfrak{R}}_{0}-1\)) are the roots of the characteristic equation. The equilibrium point \({E}_{0}\) is locally asymptotically stable or unstable according as
\({\mathfrak{R}}_{0}< 1\) or \({\mathfrak{R}}_{0}> 1\).
3.2 Theorem
If \({\mathfrak{R}}_{0}>1\) , the epidemic equilibrium \({E}_{1} = ({S}^{*},{E}^{*},{I}^{*},{R}^{*})\) is locally asymptotically stable.
Proof
\(T\)he Jacobian matrix \(J\) at \({E}_{1}\) becomes
The characteristic equation is (\(-\mu -x\)) (\({x}^{3}+a{x}^{2}+bx+c)\) = 0,
where
Appling Routh-Hurwitz condition, the model (2.8) is locally asymptotically stable at \({E}_{1}\) as \(a > 0, b > 0, ab> c\).
3.3 Theorem
When \({\mathfrak{R}}_{0}\)< 1, the system (2.8) is globally asymptotically stable, and unstable when \({\mathfrak{R}}_{0}> 1\) at \({E}_{0}\).
Proof
Using the appropriate Lyapunov function
The aforementioned function's time fractional derivatives is
From (2.8) we get,
Using little perturbation from (3.2) and (2.13), we have
Now,
Since \(S= \frac{\lambda }{\mu +\eta } \le N\), it follows that
Hence \({}^{C}{D}_{t}^{\alpha}\mathcal{F}\left(t\right)<0\) if \({\mathfrak{R}}_{0}< 1\). As a result of LaSalle's use of Lyapunov's concept [35, 58], the point \({E}_{0}\) is globally asymptotically stable and unstable if \({\mathfrak{R}}_{0}>1\).□
3.4 Theorem
The equilibrium point \({E}_{1}\) is globally asymptotically stable if \({\mathfrak{R}}_{0}>1\).
Proof
The non-linear Lyapunov function of the Goh-Volterra form is as follows:
Using Lemma 2 and taking Caputo derivative, we get
Using system (2.8) we get,
Equation (2.8) gives us the steady state,
Substituting Eq. (3.6) into (3.5) we have,
Further simplification gives,
Taking all infected classes that do not have a single star (*) from (3.7) and equal to zero:
The steady state was slightly perturbed between (2.8) and (3.8), resulting in:
Using A.M \(\ge \) G.M., we have \((2-\frac{s}{{S}^{*}}-\frac{{S}^{*}}{S})\le 0\), \((3-\frac{{S}^{*}}{S}-\frac{{I}^{*}E}{I{E}^{*}}-\frac{S{E}^{*}I}{E})\le 0\).
Thus \({}^{C}{D}_{t}^{\alpha } V\left(t\right) \le 0\) for \({\mathfrak{R}}_{0}>1\).
The point \({E}_{1}\) is globally asymptotically stable if \({\mathfrak{R}}_{0}>1\).□
Predictor–Corrector Technique for the \({\varvec{S}}{\varvec{E}}{\varvec{I}}{\varvec{R}}\) Model
The Adams–Bashforth-Moulton approach is the most extensively employed numerical approach for fractional order initial value circumstances.
Let us consider
where \({L}_{j0}^{r}\in {\mathbb{R}}\) is equal to the well-known Volterra integral equation.
The algorithm is explained as follows
Let \(T=h\widehat{m}, {t}_{n}=nh, n=\mathrm{0,1},2,\dots ,\widehat{m}\).
Corrector formulae:
Predictor formulae:
where
and
\({\beta }_{i,j,n+1}=\frac{{h}^{{\alpha }_{1}}}{\alpha }\) [\({(n+1-j)}^{{\alpha }_{1}}-\left(n-j{)}^{{\alpha }_{1}}\right] , 0\le j\le n\) and \(i=\mathrm{1,2},\mathrm{3,4}.\)
Numerical Study
In this part, we use the mathematical software to do rigorous numerical simulations of the findings produced by Adam's-Bashforth-Moulton predictor–corrector system. The model has been discussed in both the cases of without vaccine corresponding to \(\eta =0\) and with vaccine corresponding to \(\eta \ne 0\) (Fig. 1).
The estimated values of the parameters in the case of COVID-19 in India are as follows:
Figure 2 shows the behavior of susceptible individuals with time for different fractional order α in both cases of with and without vaccination. We observe that number of susceptible individuals decrease with time for all values of α. At a given period, however, the number of susceptible individuals grows as the value of decreases, suggesting that the fractional order derivatives of the dynamical variables produce greater benefits in determining the number of susceptible individuals. Moreover, the administration of vaccine shows that the number of susceptible individuals is always less than those in the case of without vaccination for different values of α as expected.

The \(SEIR\) model is depicted as a diagram

Plots of S(t) for different values of \(\alpha =0.6, 0.8, 1.0\) with respect to time (days) with vaccination and without vaccination
Figure 3 indicates the relation between exposed individuals and time for different fractional order α in both cases of with and without vaccination. We observe that number of exposed individuals increases with time for all values of α. However, at a fixed time \(t\) the number of exposed individuals decreases with a decrease in the value of α. Furthermore, the introduction of vaccination shows that the number of exposed individuals is less than those in the case of without vaccination for different values of α as expected.

Plots of E(t) for different values of \(\alpha =0.6, 0.8, 1.0\) with respect to time (days) with vaccination and without vaccination
Figure 4 represents the behavior of number of infected individuals with time for different fractional order α in both cases of with and without vaccination. We observe that the number of infected individuals decreases consistently with time for different fractional values of \(\alpha \) which further decreases with the use of vaccines.

Plots of I(t) for various values of \(\alpha =0.6, 0.8, 1.0\) with respect to time (days) with vaccination and without vaccination
The behavior of recovered individuals with time is shown in Fig. 5. It is evident from the graph that the number of recovered individuals increases with time for all values of \(\alpha \). It may also be deduced that the recovered individuals increase because of the impact of vaccines.

Plots of R(t) for different values of \(\alpha =0.6, 0.8, 1.0\) with respect to time (days) with vaccination and without vaccination
Figure 6 show the time series analysis of the \(SEIR\) model with vaccination for \({\mathfrak{R}}_{0}=1.55\) and parameter values given in Table 1. The two equilibrium points are \({E}_{0}\) = (\(1.0520 , 0, 0, 1.4411\)) and\({E}_{1} = (\mathrm{0.6795,0.0825,0.0199,1.7104})\). It shows that with varying initial values, model system (2.5) has an endemic equilibrium and is globally asymptotically stable, confirming our theoretical results in Theorem 3.4.

Time series plot of all individuals with vaccination and various initial conditions, parameter values are given in Table 1
Conclusion
In this article, we have discussed the fractional order derivatives with the Caputo operator of order \(0<\alpha \le 1\) of SEIR model with vaccination. Based on the COVID-19 cases data in India, collected up to 1st August, 2021, we estimated the basic reproduction number \({\mathfrak{R}}_{0}\mathrm{ without vaccination}\) to be 3.67 and with vaccination to be 1.55. Thus, it shows that introduction of the vaccination parameter \(\eta \) reduces the reproduction number \({\mathfrak{R}}_{0}\). The parameter values in (2.8) have been estimated using the real time data given in [59, 60] and is presented in Table 1. We have demonstrated the global stability of the equilibrium points by constructing the Lyapunov function. The choice of a derivative order is often more appropriate for modeling complex data due to its freedom and reduced error. This benefit can be utilized in real time data since the data is typically less accurate than the integer-ordered model.
As is evident from our study that vaccination is an effective method in control and prevention of the COVID-19 disease. The model described in this research may be used to investigate the dynamics of various epidemic illnesses, as well as the function of vaccination in successful transmission control. Our investigation suggests that the primary task of health officials, policymakers, and experts should be to implement the most appropriate vaccination plan to fight against the disease. It is very important that the transmission of diseases is controlled at an early stage to avoid a massive impact on the population. Some of the preventive measures that can be utilized are the enforcement of curfews, checkpoints, and containment zones. These can be used to prevent the spread of contamination.
The implications of interface reduction on epidemic dynamic nature are now being investigated. Our goal is to modify the SEIR compartmental model to account for the varying levels of population isolation.
Availability of Data and Materials
All date generated or analyzed during this study are included in this article.
References
Naheed, A., Singh, M., Lucy, D.: Numerical study of SARS epidemic model with the inclusion of diffusion in the system. Appl. Math. Comput. 229, 480–498 (2014)
Billarda, L., Dayananda, P.W.A.: A multi-stage compartmental model for HIV-infected individuals: I waiting time approach. Math. Biosci. 249, 92–101 (2014)
Upadhyay, R.K., Kumari, N., Rao, V.S.H.: Modeling the spread of bird flu and predicting outbreak diversity. Nonlinear Anal. Real World Appl. 9, 1638–1648 (2008)
Pongsumpun, P., Tang, I.M.: Dynamics of a new strain of the H1N1 influenza a virus incorporating the effects of repetitive contacts. Comput. Math. Methods Med. 2014, 487974 (2014). https://doi.org/10.1155/2014/487974
Liu, X.X., Hu, S., Fong, S.J., Crespo, R.G., Viedma, E.H.: Modelling dynamics of coronavirus disease 2019 spread for pandemic forecasting based on Simulink. Phys. Biol. 18(4), 045003 (2021)
Blackwood, J.C., Childs, L.M.: An introduction to compartmental modeling for the budding infectious disease modeler. Lett. Biomath. 5(1), 195–221 (2018)
Shereen, M.A., Khan, S.: COVID-19 infection: origin, transmission, and characteristics of human coronaviruses. J. Adv. Res. 24, 91–98 (2020)
Gumel, A.B., Mccluskey, C., Watmough, J.: An SVEIR model for assessing potential impact of an imperfect anti-SARS vaccine. Math. Biosci. Eng. 3(3), 485–512 (2006)
Wang, L., Xu, R.: Global stability of an SEIR epidemic model with vaccination. Int. J. Biomath. 9(6), 1650082 (2016)
Ji, C., Jiang, D., Shi, N.: Multigroup SIR epidemic model with stochastic perturbation. Phys. A Stat. Mech. Appl. 390(10), 1747–1762 (2011)
Paul, S., Mahata, A., Mukherjee, S., Roy, B.: Dynamics of SIQR epidemic model with fractional order derivative. Partial Differ. Equ. Appl. Math. 5, 100216 (2022)
Pongkitivanichkul, C., Samart, D., Tangphati, T., Koomhin, P., Pimton, P., Dam-o, P., Payaka, A., Channuie, P.: Estimating the size of COVID-19 epidemic outbreak. Phys. Scr. 95, 085206 (2020)
Zhu, L.H., Wang, X.W., Zhang, H.H., Shen, S.L., Li, Y.M., Zhou, Y.D.: Dynamics analysis and optimal control strategy for a SIRS epidemic model with two discrete time delays. Phys. Scr. 95, 035213 (2020)
Yu, J., Jiang, D., Shi, N.: Global stability of two-group SIR model with random perturbation. J. Math. Anal. Appl. 360(1), 235–244 (2009)
Yuan, C., Jiang, D., Regan, D.O., Agarwal, R.P.: Stochastically asymptotically stability of the multi-group SEIR and SIR models with random perturbation. Commun. Nonlinear Sci. Numer. Simul. 17(6), 2501–2516 (2012)
Tang, B., Wang, X., Li, Q., Bragazzi, N.L., Tang, S., Xiao, Y., Wu, J.: Estimation of the transmission risk of the 2019-nCoV and its implication for public health interventions. J. Clin. Med. 9(2), 462 (2020)
Frank, T.D., Chiangga, S.: SEIR order parameters and eigenvectors of the three stages of completed COVID-19 epidemics: with an illustration for Thailand January to May 2020. Phys. Biol. 18(4), 046002 (2021)
Mahata, A., Paul, S., Mukherjee, S., Roy, B.: Stability analysis and Hopf bifurcationin fractional order SEIRV epidemic model with a time delay in infected individuals. Partial Differ. Equ. Appl. Math. 5, 100282 (2022)
Vattay, G.: Forecasting the outcome and estimating the epidemic model parameters from the fatality time series in COVID-19 outbreaks. Phys. Biol. 17(6), 065002 (2020)
Kucharski, A., Russell, T., Diamond, C., Liu, Y., Edmunds, J., Funk, S., Eggo, R.: Early dynamics of transmission and control of COVID-19: a mathematical modelling study. Lancet Dis. 20(5), 553–558 (2020). https://doi.org/10.1016/S1473-3099(20)30144-4
Mahata, A., Paul, S., Mukherjee, S., Das, M., Roy, B.: Dynamics of caputo fractional order seirv epidemic model with optimal control and stability analysis. Int. J. Appl. Comput. Math. 8(28), 1–25 (2022)
Wang, H., Wang, Z., Dong, Y., Chang, R., et al.: Phase-adjusted estimation of the number of Coronavirus Disease 2019 cases in Wuhan, China. Cell. Discov. 6(10), 1–8 (2020)
Wu, J.T., Leung, K., Leung, G.M.: Now casting and forecasting the potential domestic and international spread of the 2019-ncov outbreak originating in wuhan, china: a modelling study. The Lancet 395, 689–697 (2020)
Kermack, N.O., McKendrick, A.G.: A Contribution to the mathematical theory of epidemics. P. R. Soc. Lond. A. Mat. US 115(772), 700–722 (1927)
Anderson, R.M., May, R.M.: Infectious Diseases of Humans. Oxford University Press, Oxford (1991)
Shaikh, A.S., Nisar, K.S.: Transmission dynamics of fractional order typhoid fever model using Caputo-Fabrizio operator. Chaos Solitons Fractals 128, 355–365 (2019)
Erturk, V.S., Zaman, G., Momani, S.: A numeric analytic method for approximating a giving up smoking model containing fractional derivatives. Comput. Math. Appl. 64, 3068–3074 (2012)
Bushnaq, S., Khan, S., Shah, K., Zaman, G.: Mathematical analysis of HIV/AIDS infection model with Caputo-Fabrizio fractional derivative. Cogent Math. Stat. 5, 1432521 (2018)
Ghanbari, B., Kumar, S., Kumar, R.: A study of behaviour for immune and tumor cells in immune genetic tumour model with non-singular fractional derivative. Chaos Solitons Fractals 133, 109619 (2020)
Ullah, S., Khan, M.A., Farooq, M., Hammouch, Z., Baleanu, D.: A fractional model for the dynamics of tuberculosis infection using Caputo-Fabrizio derivative. Discrete Contin. Dyn. Syst. Ser. S 13(3), 975–993 (2020). https://doi.org/10.3934/dcdss.202005
Shaikh, A., Sontakke, B.R.: Impulsive initial value problems for a class of implicit fractional differential equations. Comput. Methods Differ. Equ. 8(1), 141–154 (2020)
Kumar, S., Kumar, A., Baleanu, D.: Two analytical methods for time-fractional nonlinear coupled Boussinesq–Burger’s equations arise in propagation of shallow water waves. Nonlinear Dyn. 85, 699–715 (2016)
Daftardar-Gejji, V., Jafari, H.: An iterative method for solving nonlinear functional equations. J. Math. Anal. Appl. 316, 753–763 (2006)
Sontakke, B.R., Shaikh, A.S., Nisar, K.S.: Approximate solutions of a generalized Hirota-Satsuma coupled KdV and a coupled mKdV systems with time fractional derivatives. Malays. J. Math. Sci. 12(2), 173–193 (2018)
Caputo, M., Fabrizio, M.: A new definition of fractional derivative without singular kernel. Prog. Fract. Differ. Appl. 1(2), 73–85 (2015)
Mouaouine, A., Boukhouima, A., Hattaf, K., Yousf, N.: A fractional order sir epidemic model with nonlinear incidence rate. Adv. Differ. Equ. 1, 1–9 (2018)
Kumar, S.: A new analytical modelling for fractional telegraph equation via Laplace transform. Appl. Math. Model. 38, 3154–3163 (2014)
Shaikh, A., Tassaddiq, A., Nisar, K.S., Baleanu, D.: Analysis of differential equations involving Caputo-Fabrizio fractional operator and its applications to reaction–diffusion equations. Adv. Differ. Equ. 178, 1–14 (2019)
Akdim, K., Ez-Zetouni, A., Zahid, M.: The influence of awareness campaigns on the spread of an infectious disease: a qualitative analysis of a fractional epidemic model. Model. Earth Syst. Environ. (2021). https://doi.org/10.1007/s40808-021-01158-9
Atangana, A.: Modelling the spread of COVID-19 with new fractal-fractional operators: can the lockdown save mankind before vaccination? Chaos Solit. Fractals. 136, 109860 (2020)
Raza, A., Chu, Y.M., Bajuri, M.Y., Ahmadian, A., Ahmed, N., Rafiq, M., Salahshour, S.: Dynamical and nonstandard computational analysis of heroin epidemic model. Res. Phys. 34, 105245 (2022)
Zhou, J.C., Salahshour, S., Ahmadian, A., Senu, N.: Modeling the dynamics of COVID-19 using fractal-fractional operator with a case study. Res. Phys. 33, 105103 (2022)
Shloof, A.M., Senu, N., Ahmadian, A., Salahshour, S.: An efficient operation matrix method for solving fractal–fractional differential equations with generalized Caputo-type fractional–fractal derivative. Math. Comput. Simul. 188, 415–435 (2021)
Ahmed, N., Raza, A., Rafiq, M., Ahmadian, A., Batool, N., Salahshour, S.: Numerical and bifurcation analysis of SIQR model. Chaos Solit. Fractals. 150, 111133 (2021)
Salahshour, S., Ahmadian, A., Allahviranloo, T.: A new fractional dynamic cobweb model based on nonsingular kernel derivatives. Chaos Solit. Fractals. 145, 110755 (2021)
Salahshour, S., Ahmadian, A., Pansera, B.A., Ferrara, M.: Uncertain inverse problem for fractional dynamical systems using perturbed collage theorem. Commun. Nonlinear Sci. Numer. Simul. 94, 105553 (2021)
Salahshour, S., Ahmadian, A., Abbasbandy, S., Baleanu, D.: M-fractional derivative under interval uncertainty: theory, properties and applications. Chaos Solit. Fractals. 117, 84–93 (2018)
Ahmad, S.W., Sarwar, M., Shah, K., Ahmadian, A., Salahshour, S.: Fractional order mathematical modeling of novel corona virus (COVID-19). Math. Meth. Appl. Sci. 1–14 (2021)
Raza, A., Chu, Y.M., Bajuri, M.Y., Ahmadian, A., Ahmed, N., Rafiq, M., Salahshour, S.: Dynamical and nonstandard computational analysis of heroin epidemic model. Res. Phys. 34, 105245 (2022)
Haidong, Q., Arfan, M., Salimi, M., Salahshour, S., & Ahmadian, A. (2021). Fractal–fractional dynamical system of Typhoid disease including protection from infection. Eng. Comput., 1–10.
Ahmed, N., Raza, A., Rafiq, M., Ahmadian, A., Batool, N., Salahshour, S.: Numerical and bifurcation analysis of SIQR model. Chaos Solitons Fractals 150, 111133 (2021)
www.mohfw.gov.in: Retrieved 28th April, 2021.
www.cowin.gov.in: Retrieved 21 March 2021.
Paul, S., Mahata, A., Ghosh, U., Roy, B.: SEIR epidemic model and scenario analysis of COVID-19 pandemic. Ecol. Gene. Genom. 19, 100087 (2021)
Mwalili, S., Kimathi, M., Ojiambo, V., Gathungu, D., Mbogo, R.: SEIR model for COVID-19, dynamics incorporating the environment and social distancing. BMC Res. Notes 13(1), 1–5 (2020)
Losada, J., Nieto, J.J.: Properties of the new fractional derivative without singular kernel. Prog. Fract. Differ. Appl. 1(2), 87–92 (2015)
Samko, S.G., Kilbas, A.A., Marichev, O.I.: Fractional Integrals and Derivatives: Theory and Applications. Gordon & Breach, Philadelphia (1993)
Kilbas, A., Srivastava, H., Trujillo, J.: Theory and Applications of Fractional Differential Equations, North-Holland Mathematics Studies. 204 (2006)
Odibat, Z.M., Shawagfeh, N.T.: Generalized taylor’s formula. Appl. Math. Comput. 186, 286–293 (2007)
Perko, L.: Differential Equations and Dynamical Systems. Springer, New York (2000)
Li, M.Y., Smith, H.L., Wang, L.: Global dynamics of an SEIR epidemic model with vertical transmission. SIAM J Appl. Math. 62, 58 (2001)
India COVID-19 Tracker. https://www.covid19india.org/2020. Retrieved: 2021–05–17
Funding
The authors have not disclosed any funding.
Author information
Authors and Affiliations
Contributions
Each of the authors contributed equally to each part of this work. All authors read and approved the final manuscript.
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare that they have no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Paul, S., Mahata, A., Mukherjee, S. et al. Study of Fractional Order SEIR Epidemic Model and Effect of Vaccination on the Spread of COVID-19. Int. J. Appl. Comput. Math 8, 237 (2022). https://doi.org/10.1007/s40819-022-01411-4
Accepted:
Published:
DOI: https://doi.org/10.1007/s40819-022-01411-4