
Abstract
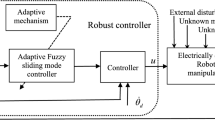
In this paper, a controller is proposed that is able to overcome existing structured and unstructured uncertainties in the dynamic equations of robot manipulator and its actuators. In this method, at first, through sliding mode control and by using defined dynamic equations of robot manipulator, robust nonlinear controller is designed that is capable of overcoming the existing uncertainties. In the following, due to incidence of the control input chattering, a first-order TSK fuzzy approximator is designed in such a way that is able to overcome undesirable chattering phenomenon. The presented fuzzy sliding mode control has a small number of calculations. However, the design structure of proposed control is in such a way that leads to increase the number of needed sensors for the practical implementation of this controller. Next, to overcome these problems, an adaptive fuzzy approximator is used to approximate the bounds of the existing uncertainties. The proposed adaptive fuzzy sliding mode control has low volume of calculations, and due to the use of single-input, single-output fuzzy rules in the adaptive fuzzy approximator, the problem of the increasing number of sensors is resolved. Mathematical proof investigates that a closed-loop system with the proposed control and in the presence of existing uncertainties in the dynamic equations of robot manipulator and its actuators has global asymptotic stability. Finally, to demonstrate the performance of the proposed controller, a two-link elbow robot manipulator is used as a case study. The simulation results show the favorable efficiency of the proposed controller.












Similar content being viewed by others


References
Takegaki, M., Arimoto, S.: A new feedback method for dynamic control of manipulators. J. Dyn. Syst. Meas. Control 102(3), 119–125 (1981)
Arimoto, S., Miyazaki, F.: Asymptotic stability of feedback control for robot manipulators. Proc of IFAC Symposium on Robot Control Spa, pp. 447–452 (1985)
Parra-Vega, V., et al.: Dynamic sliding PID control for tracking of robot manipulators: theory and experiments. IEEE Trans. Robot. Autom. 19(6), 967–976 (2003)
Spong, M.W., Hutchinson, S., Vidyasagar, M.: Robot Modeling and Control, 1st edn. Wiley, New York (2006)
Moreno-Valenzuela, J., Santibáñez, V.: Robust saturated PI joint velocity control for robot manipulators. Asian J. Control 15(1), 64–79 (2013)
Paul, R.P.: Robot Manipulators, Mathematics, Programming and Control. MIT Press, Cambridge (1981)
Soltanpour, M.R., Fateh, M.M., Ahmadifard, A.R.: Nonlinear tracking control on a robot manipulator in the task space with uncertain dynamics. J. Appl. Sci. 8(23), 4397–4403 (2008)
DeWit, C.C., Siciliano, B., Bastin, G. (eds.): Theory of Robot Control. Springer, Berlin (2012)
Cai, L., Song, G.: Joint stick-slip friction compensation of robot manipulators by using smooth robust controllers. J. Robot. Syst. 11(6), 451–470 (1994)
Abdallah, C., Dawson, D., Dorato, P., Jamshidi, M.: Survey of robust control for rigid robots. IEEE Control Syst. Mag. 11(2), 24–30 (1991)
Fateh, M.M., Khorashadizadeh, S.: Robust control of electrically driven robots by adaptive fuzzy estimation of uncertainty. Nonlinear Dyn. 69(3), 1465–1477 (2012)
Ngo, T.Q., et al.: Robust adaptive neural-fuzzy network tracking control for robot manipulator. Int. J. Comput. Commun. Control 7(2), 341–352 (2014)
Young, K.: Controller design for a manipulator using theory of variable structure system. IEEE Trans. Syst. Man Cybern. 8, 101–109 (1978)
Yeung, K.S., Chen, Y.P.: A new controller design for manipulators using the theory of variable structure systems. IEEE Trans. Autom. Control 33(2), 200–206 (1988)
Sira-Ramirez, H., Spong, M.W.: Variable structure control of flexible joint manipulators. Int. Robot. Autom. 3(2), 57–64 (1988)
Soltanpour, M.R.: Variable structure tracking control of robot manipulator in the task space in the presence of dynamic and kinematic uncertainties. J. Solid Fluid Mech. Shahrood Univ. Technol. 1(1), 81–88 (2012)
Veysi, M., Soltanpour, M.R.: Eliminating chattering phenomenon in sliding mode control of robot manipulators in the joint space using fuzzy logic. J. Solid Fluid Mech. Shahrood Univ. Technol. 2(3), 45–54 (2012)
Veysi, M.: A new robust fuzzy sliding mode control of robot manipulator in the task space in presence of uncertainties. Int. J. Sci. Eng. Res. 6(6), 372–381 (2015)
Soltanpour, M.R., Khooban, M.H., Soltani, M.R.: Robust fuzzy sliding mode control for tracking the robot manipulator in joint space and in presence of uncertainties. Robotica 32(3), 433–446 (2014)
Soltanpour, M.R., Khooban, M.H.: A particle swarm optimization approach for fuzzy sliding mode control for tracking the robot manipulator. Nonlinear Dyn. 74(1–2), 467–478 (2013)
Veysi, M., Soltanpour, M.R., Khooban, M.H.: A novel self-adaptive modified bat fuzzy sliding mode control of robot manipulator in presence of uncertainties in task space.”. Robotica 33, 1–20 (2014)
Yoo, B., Ham, W.: Adaptive fuzzy sliding mode control of nonlinear systems. IEEE Trans. Fuzzy Syst. 6(2), 315–321 (1998)
Medhaffar, H., Derbel, N., Damak, T.: A decoupled fuzzy indirect adaptive sliding mode controller with application to robot manipulator. Int. J. Model. Ident. Control 1(1), 23–29 (2006)
Wang, J., Rad, A.B., Chan, P.T.: Indirect adaptive fuzzy sliding mode control: part I: fuzzy switching. Fuzzy Sets Syst. 122(1), 21–30 (2001)
Yoo, B., Ham, W.: Adaptive control of robot manipulator using fuzzy compensator. IEEE Trans. Fuzzy Syst. 8(2), 186–199 (2000)
Guo, Y., Woo, P.-Y.: An adaptive fuzzy sliding mode controller for robotic manipulators. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 33(2), 149–159 (2003)
Ho, H.F., Wong, Y.K., Rad, A.B.: Adaptive fuzzy sliding mode control design: Lyapunov approach. In: IEEE 5th Asian control conference, vol 3 (2004)
Wai, R.-J., Lin, C.-M., Hsu, C.-F.: Adaptive fuzzy sliding-mode control for electrical servo drive. Fuzzy Sets Syst. 143(2), 295–310 (2004)
Tong, S.C., Li, H.X.: Fuzzy adaptive sliding-mode control for MIMO nonlinear systems. IEEE Trans. Fuzzy Syst. 11(3), 354–360 (2003)
Lin, C.-M., Hsu, C.-F.: Adaptive fuzzy sliding-mode control for induction servomotor systems. IEEE Trans. Energy Convers. 19(2), 362–368 (2004)
Shahnazi, R., Shanechi, H.M., Pariz, N.: Position control of induction and DC servomotors: a novel adaptive fuzzy PI sliding mode control. IEEE Trans. Energy Convers. 23(1), 138–147 (2008)
Soltanpour, M.R., Otadolajam, P., Soltani, M.R.: Optimal adaptive fuzzy integral sliding model control for electrically driven SCARA robot manipulator. Modares J. Electr. Eng. 12(1), 33–50 (2015)
Benbrahim, M., Essounbouli, N., Hamzaoui, A., Betta, A.: Adaptive type-2 fuzzy sliding mode controller for SISO nonlinear systems subject to actuator faults. Int. J. Autom. Comput. 10(4), 335–342 (2013)
Sharkawy, A.B., Salman, S.A.: An adaptive fuzzy sliding mode control scheme for robotic systems. Intell. Control Autom. 2(4), 299–309 (2011)
Wang, Li-Xin: Adaptive Fuzzy Systems and Control: Design And Stability Analysis. Prentice-Hall, Upper Saddle River (1994)
Fateh, M.M.: On the voltage-based control of robot manipulators. Int. J. Control Autom. Syst. 6(5), 702–712 (2008)
Veysi, M.: Fuzzy sliding mode control of robot manipulator, based on voltage control. In: The International Conference in New Research of Electrical Engineering and Computer Science, Tehran, Iran (2015)
John, J.C.: Introduction to Robotics: Mechanics and Control. Addision-Wesley, Reading (2005)
Slotine, J.J.E., Li, W.: Applied Nonlinear Control. Prentice Hall, Englewood Cliffs (1991)
Wang, L.X.: A Course in Fuzzy Systems. Prentice-Hall Press, New Jersey (1997)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Veysi, M., Soltanpour, M.R. Voltage-Base Control of Robot Manipulator Using Adaptive Fuzzy Sliding Mode Control. Int. J. Fuzzy Syst. 19, 1430–1443 (2017). https://doi.org/10.1007/s40815-016-0234-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40815-016-0234-5