
Abstract
Purpose of the Review
This paper is devoted to the review of the most popular literature Road Traffic Noise Models (RTNMs) frameworks, from the oldest ones to the recent machine learning techniques. A dedicated section is reserved to the review of Noise Emission Models (NEMs), with specific focus on approaches that allow the assessment of single vehicles’ emissions. Finally, some propagation models are also briefly presented, along with the assessment of the impact on the population of road traffic noise, in terms of time-averaged indicators and exposure descriptors.
Recent Findings
In recent years, many efforts have been devoted to developing methods and models to assess the impact of environmental noise. Considering the primary role of road traffic as a noise source, estimating its impact is fundamental when evaluating the acoustic environment of a specific urban area. The scope of RTNMs is to provide an assessment of the noise emitted by the source in terms of traffic flows, propagate it at any desired point, including possible corrective factors, assess the impact at the receiver, and use this information to provide maps and other useful outputs.
Summary
This review summarizes the so-far developed approaches for road traffic noise evaluation and furthermore underscores the ongoing necessity for research to develop more precise tools useful for managing road traffic noise’s adverse effects on urban environments and public well-being. Challenges and limitations of such models are discussed in the conclusions, highlighting the need for providing high quality input data and avoiding site-dependent approaches.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
The ongoing urbanization and population growth that characterize modern cities have resulted in an increased demand for mobility, consequently contributing to the degradation of acoustic environments in urban scenarios. As a result, a significant amount of people, about 20% of the European population, live in areas where noise levels are considered harmful to human health due to long-term exposure to high levels of noise, with road traffic consistently identified as the most annoyance noise source [1]. The potential consequences of prolonged exposure to noise, both psychological and physical well-being, include sleep disturbances, hearing loss, cardiovascular issues, anxiety, and stress, among others [1,2,3]. Considering that one of the main EU objectives is to reduce the number of people chronically disturbed by transport noise by at least 30% within the year 2030 [4], it appears clear the necessity to be able to assess the impact of transportation noise. Therefore, in recent years, considerable effort has been devoted to developing methods and models to assess the impact of environmental noise. In particular, considering the primary role of road traffic as a noise source [1], the estimation of its impact is fundamental when evaluating the acoustic environment of a specific urban area. This evaluation can be carried out either through extensive in situ measurement campaigns or using appropriate modelling simulations. However, the use of simulations over in situ measurements can be preferred due, for example, to the high costs involved, the time burden related to the organization and any follow-up studies of such measurement campaigns, as well as the need for appropriately trained staff and so on. Finally, a fundamental and non-trivial reason that might lead to a preference for the use of models over actual measurements is that the impact on the urban noise environment of a road still in the design phase might want to be assessed and, as such, it cannot yet be the subject of measurements.
A detailed review of the most popular Road Traffic Noise Models (RTNMs) was presented by Steele in [5], in which the author presented the early models, together with the methods used at the time of the publication, by reporting the equations and the adopted parameters. Mann et al. provide a specific overview on RTNMs for developing countries [6]. Moreover, by reviewing 11 traffic noise modelling strategies, Ibili et al. found that researchers, probably due to costs and time required to develop new models, have developed new RTNMs by starting from earlier models as a baseline, adapting them to their specific conditions [7]. Some other critical and interesting reviews can be find in the work of Garg et al. and of Rajakumara et al. [8, 9], in which useful resuming tables, reporting the main features of the RTNMs under review, can be found. In particular, Garg et al. [8] draw a comparison between the main traffic noise models adopted in different countries on the basis of technical attributes, such as source modelling and sound propagation algorithms. On the other hand, Rajakumara et al. [9] compared eight literature models with an “ideal” model to be developed that could overcome several gaps of the literature ones.
Focusing on Noise Emission Models (NEMs) of single vehicle and road traffic, some recent papers have been published, providing critical insights and useful methods. For instance, in [10••], Rey-Gozalo et al. reported how recent studies’ results actually could improve the accuracy of road traffic noise assessment and how appropriate action plans could reduce the noise emitted by vehicles.
In [11], Can and Aumond studied the influence of speed and acceleration in road traffic noise emissions estimation. Using real vehicles trajectories data, taken in a dense urban corridor, they found that commonly used noise emission models could misestimate noise levels under congestion, emphasizing the need for additional enhancements in dynamic road traffic noise models.
Another detailed description of some NEMs can be found in [12] in which the selected models were tested to highlight critical hotspots in the case study. In [13•], Pascale et al. also considered how different typologies of propulsion (namely gazoline, diesel, LPG, and hybrid) contribute to the correct evaluation of sound power level of a vehicle, opening the way to a detailed microscopic modelling that includes also the motorization of the single vehicle.
Once the single vehicle noise emission has been estimated with any microscopic NEM, it is possible to define impact indicators. In [14], two indicators based on the second-by-second sound power level of a single vehicle are defined, namely the overall and the average sound power level emitted during a route. They can be used for eco-routing applications, such as in [14, 15], or for signal setting design, as for example in [16], expanding the potential applications of road traffic noise assessment. Moreover, the problem of variability in single vehicle sound power levels of mixed fleet can occur. This is mainly due to variation in emissions of a fleet of vehicles, affecting both static and dynamic modelling. In [17•], the authors suggested that noise emission levels calculated through usual static noise prediction models should be corrected using a correcting factor that depends on the variance of the residuals distribution.
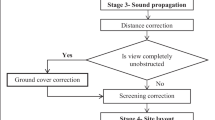
The general idea of any Road Traffic Noise Model is to provide an assessment of the noise emitted by the source in terms of traffic flows, to propagate it at any desired point, including possible corrective factors, to assess the impact at the receiver, and to use this information to provide maps and other useful outputs. Figure 1 illustrates the four main components of road traffic noise modelling framework. It is noteworthy that certain models proposed by the community do not entirely separate the different models, but this schematic view nonetheless allows for their comprehensive understanding.

Flowchart of the common road traffic noise modelling chain
In this paper, the authors aim to present the most popular modelling frameworks that have been proposed in recent years. For the sake of brevity, the focus of the paper will be on emission models, with special care on models that allow the assessment of single vehicles’ emissions. These models, in fact, can be used in a microscopic modelling of a complex network, combined with a micro-to-macro process and a propagation model, to assess the road traffic noise impact at any receiver, as it is done in most macroscopic models. A detailed report about how the input of the models is obtained, i.e. the study of the activity of the source, will be postponed to a forthcoming paper, as well as a review of the propagation models and the assessment at the receiver. For these reasons, after resuming in “Evolution of Road Traffic Noise Modelling: from Early Statistical Models to Machine Learning Approaches” section the evolution of road traffic noise modelling approach, from early models to recent AI and machine learning techniques, an overview of the most up-to-date approaches to assess the sound power level \(L_{W}\) of road traffic, namely the NEMs is provided in “NEMs Review” section. The propagation models of road traffic noise are briefly presented in “Propagation and Assessment at the Receiver” section, together with the assessment at the receiver, in which the possible uses of RTNMs predictions are presented. To assess the impact on the population of road traffic noise, in fact, collective and time-averaged indicators must be estimated to compare prediction results with regulation limits, as well as exposure descriptors to provide insight on health effects. Finally, in “Conclusions” section, the conclusions are given. It is noteworthy to underline that the variables and symbols of the models reported in this paper may sometimes be slightly different from the original versions. This choice was made for coherence purposes and to improve the readability of the paper.
Evolution of Road Traffic Noise Modelling: from Early Statistical Models to Machine Learning Approaches
Many models have been developed and used to assess road traffic noise. The older approach consists on collecting large sets of field data in several conditions and then performing statistical regressions with fixed formulas. Such an approach has been then improved including additional parameters and adopting more advanced mathematical algorithms.
Historical Models
The earliest RTNMs date back to the 1950s and work with traffic flow, instead of individual vehicles. Although based on a statistical approach that simplifies the actual traffic conditions, they are usually able to provide fairly accurate results. These are generally the simplest type of models, characterized by a small amount of input data required and providing as an output the percentile \(L_{50}\) or the \(L_{eq}\). They are usually based on regressions that are typically performed on specific dataset. Thus, they are influenced by local conditions, both in terms of road and weather characteristics and vehicle types, which leads them to a limited accuracy. Indeed, the key inputs are usually traffic flows for the vehicle categories considered (i.e. light and heavy vehicles), characteristics of the road surface, and distance between carriage and receivers.
An early RTNM was developed in the Handbook of Acoustic Noise Control [18]. This model primarily relied on two inputs: Q is the traffic volume in vehicles per hour, and d is the distance from the observation point to the center of the traffic lane. The percentile \(L_{50}\) for vehicles with a speed of about 55–75 km/h and a distance greater that 6 m can be computed following the formula (1):
It has to be underlined that this model does not provide any kind of specification with respect to vehicle types or road characteristics.
Subsequently, Nickson et al. introduced an alternative model that included a constant term, also referred to as C essential for aligning the model with experimental data [19]. The formula used is presented in Eq. (2)
Later, Johnson et al. presented a model that also considered the average vehicle speed v as input data, along with some corrective factors related to ground attenuation and gradient, as shown in formula (3) [20]:
Galloway et al. in [21] made some improvements to the previous model, introducing the percentage of heavy vehicles P as in Eq. (4).
With the introduction in several regulations of the equivalent level \(L_{eq}\) as a sound level indicator, one of the most used models that uses the same inputs to compute the equivalent level is the Burgess model [22] presented in Eq. (5).
Another model was proposed by Griffiths and Langdon in 1968, with the aim of computing the \(L_{eq}\) using the percentile levels \(L_{10}\), \(L_{50}\), and \(L_{90}\) as in formula (6) [23].
Each statistical percentile noise indicator can be computed as in Eq. (7).
Later on, Fagotti et al. explored the possibility of introducing other vehicle categories into the previous models, making them more accurate. Specifically, their RTNM considers the motorcycles and buses flow (i.e. respectively \(Q_{M}\) and \(Q_{BUS}\)), aside from the light-duty and heavy-duty vehicles ones (i.e. \(Q_{L}\) and \(Q_{H}\)) using appropriately calibrated coefficients to take into account their different contributions. The formulation is reported in (8) [24].
Another model was developed by the French C.S.T.B (Centre Scientifique et Technique du Batiment), in which the proposed formulation for \(L_{eq,A}\) helps to consider different conditions of road and vehicle flow [25]. In particular, the \(L_{eq,A}\) is calculated using the estimation of \(L_{50}\) according to formula (9):
The percentile level \(L_{50}\) is estimated, using, either in urban or highway scenario with traffic flow lower than 1000 vehicles/hour, Eq. (10):
or in urban configuration, where very tall buildings are flanking the street, taking into account the width l of the road itself, as in formula (11):
In both the Eqs. (10) an (11), the equivalent vehicular flow is calculated as reported in formula (12):
where n is a sort of homogenization coefficient, helping to consider that heavy vehicles cause a greater noise emission than light ones, also called “acoustical equivalent” of heavy vehicles. This coefficient provides the number of equivalent light vehicles that produce the same acoustic energy as a heavy vehicle, travelling at the same speed. A formulation of its dependence from speed is given in [26].
General Equation of the Early Models
Almost all the previously mentioned statistical RTNMs can be traced back to a general equation of the equivalent noise level:
where Q is the traffic volume in vehicles/hour, d is the distance from the observation point to the center of the traffic lane, P is the percentage of heavy vehicles, and n is the acoustic equivalent coefficient above presented. The A, b, and C parameters can be computed using a regression approach on many \(L_{eq}\) data with different values of the input variables (Q, P, d). As for n, similar regressive approaches can be used or it can be even established by single vehicle emission measurements. Obviously, several homogenization coefficients could be defined to consider different categories in addition to the heavy one (i.e. motorcycles, buses).
As already mentioned earlier, the calibration of these parameters is usually performed by means of regression on field data. A different approach is presented in [27], in which the authors showed that a computed dataset, depicting several different scenarios of traffic, both urban and extra-urban, can replace field measurements in calibrating a multi-linear regressive model with good results. The performance of such a model depends mostly on the selected ranges of variables and on the RTNM adopted to simulate the equivalent levels.
The general equation of a regressive model is often modified by means of several corrective parameters that, depending on the model considered, include the role of average speed, kind of road (gradient, asphalt, etc.), weather and traffic conditions, the presence of disturbing elements to the propagation of sound waves such as barriers, building, etc.
CoRTN English Model
The composition of a general formula with several correction factors is at the basis of the English standard model, referred to as CoRTN procedure [28]. CoRTN model takes into consideration, aside from the traffic flow and composition, the mean speed too. In the first step, the other conditions are idealized, for example assuming the hypothesis of moderate wind velocity and a dried road surface. One of the equations proposed in this model allows to assess the hourly noise level at a distance of 10 m from the nearest roadway as in Eq. (14). Then, the computed level can be corrected through the use of different coefficients to consider the actual conditions of the road infrastructure under study as shown by the several coefficients.
Thus, several corrective coefficients are considered, \(\Delta _{flow}\) due to traffic flow adjustment, \(\Delta_G\) due to the road’s gradient, \(\Delta_P\) due to the type of road pavement, \(\Delta_D\) is a distance adjustment, \(\Delta_S\) due to the presence of shielding, \(\Delta_A\) take into consideration the angle of view adjustment, and \(\Delta_R\) the reflection adjustment.
RLS 90 German Model
Another model is the one used as the German standard, RLS 90 model [29]. The needed inputs for this model, aside from the “classic” ones, collect information about the average hourly traffic flow, considering also the motorcycles category and the average speed of each category. A peculiar characteristic of this model is its potential to assess the noise emission of a parking lot. As the aforementioned CoRTN model, RLS 90 model uses ideal conditions to assess \(L_{m,E}^{(25\,m)}\), an average noise level at a distance of 25 m from the centre of the carriageway as reported in Eq. (15).
Several corrective factors are then added to such value, to take into account speed limits, different road surfaces and vehicle speeds, rises and falls along the route, the presence of buildings, air absorption, ground and atmospheric conditions, topography characteristics, and presence of traffic lights.
C.N.R. Italian Model
To obtain an adaptation of the German model to the Italian framework, it has been developed the Italian National Research Center (C.N.R.) model [30], then improved by Cocchi et al. [31]. The model formulation is reported in Eq. (16).
In addition to what has already been explained for the German and the UK models, in the C.N.R. model, two new parameters have been considered, \(\alpha\) and \(\beta\), in order to evaluate the characteristics of countries roads and vehicles. In particular, \(\alpha\) is related to the single vehicle’s noise emission and \(\beta\) to the heavy vehicle’s noise emissions. Moreover, \(Q_L\) and \(Q_H\) are respectively light and heavy vehicle traffic flow, while \(d_0\) is a fixed reference distance of 25 m. Several corrective coefficients are then considered, \(\Delta _V\) due to mean flow velocity, \(\Delta _F\) and \(\Delta _B\) due to the presence of a reflective facade near or in the opposite direction of the observation point, and \(\Delta _{VB}\) due to the presence of traffic lights or slow traffic conditions.
ERTC Thailand Model
In 1999, the Environmental Research and Training Centre (ERTC) of Thailand established several equations to assess the average power level due to small and large vehicle groups through a regression approach of measured data [32]. Once the power level is obtained as a function of the speed, it has been used for estimating the \(L_{eq}\), as in Eq. (17).
where d is the distance from a traffic line to receiving point, Δdiff is the correction value for diffraction attenuation and L is the average gap distance estimated as follows (18):
Li et al. Chinese Model
In 2002, a road traffic noise model has been developed by Li et al. in the Chinese area, considering local environmental conditions, vehicle types, and traffic conditions. They classified vehicles into three types, namely, light cars, medium trucks, and heavy trucks. The model gave as output the equivalent noise level with respect to speed, traffic flow, distance, gradient, ground absorption, finite length of road segment, and the presence of any shielding adjustment as shown in formula (19) [33].
In addition to the coefficients characterized by the same notation as those presented in previous models, \(v_{eq}\) is the equivalent speed of traffic flow, \(\Delta _{G}\), as above, is an adjustment for the road gradient, \(\Delta _{soft}\) is the percentage of soft ground cover within the road segment considered, and \(\Delta _{\phi }\) is the angle subtended by road segment relative to the receiver.
Nordtest Finnish Model
In Finland, the Nordtest approach was developed under the auspices of the Nordic Council of Ministers [34]. The Nordtest model permits to assess the \(L_{eq}\) by performing noise measurements in a continue way for certain time interval period. It describes how to measure the noise level in a precise point and using several microphone positions. The 24 h equivalent noise level \(L_{eq,24\,h}\) formula is reported in (20), in which it is clear also the independence of noise levels measured during the day, evening, and night periods, respectively \(L_{d,A}\), \(L_{e,A}\), \(L_{n,A}\) to which correspond time intervals indicated by the same indices.
where the sum of the three considered time interval is 24 h. They also proposed an alternative method to assess the traffic conditions during night or evening period, by considering average traffic conditions instead of taking actual measurements. For the light vehicles, the used equations are reported in (21).
while for heavy vehicles, reference is made to (22). All three equations refer to a distance of 10 m.
Finally, one can compute the equivalent noise level in 1 h span as in (23).
where \(n_{light}\) and \(n_{heavy}\) are the mean traffic flow per hours of the two considered categories.
Machine Learning Models
One of the latest trends in road traffic noise modelling is the development of machine learning models. A new way of approaching the traffic noise modelling problem is the Artificial Intelligence (AI) approach, which can be more reliable and robust in facing non-standard conditions, as stated in [35, 36] and [37]. The AI techniques used nowadays for the prediction of road traffic noise are various, including the artificial neural network (ANN), adaptive neuro fuzzy inference system (ANFIS), and genetic algorithm (GA). A bibliographic overview of fifty papers concerning the application of artificial intelligence (AI)-based models in modelling vehicular road traffic noise, selected via a computerized search method, is provided in [38•]. Some examples of the use of ANN in the domain of road traffic noise in the literature are [39] and [40], where the percentage of heavy vehicles, average speed, and number of total flowing vehicles are used as input values to implement an ANN model to predict road traffic \(L_{eq}\) and \(L_{10}\) values in two Indian cities. A similar work [37] implements a similar model but with a higher number of input parameters (total flowing vehicles, average speed, number of cars, vans, pickup, heavy vehicles and motorcycles, density of building facing the observer, and building reflection factor) in Teheran. An additional research reported in [41] takes into consideration the same input parameters, adding the type of pavement on the road.
A comparison between ANN and other machine learning techniques has been provided in [42], where authors demonstrated the best prediction results come from ANN compared to other techniques. Similar results have been obtained in [43] and [44], where ANN technique has been compared with regressive approaches and other machine learning techniques, respectively.
Some noticeable works on ANFIS are the work of Cirianni and Leonardi [45], who used ANFIS model to predict road traffic noise of two cities in Italy, where in [46] and [47], two models involving fuzzy logic have been developed for prediction and classification of road traffic noise.
In the work of Ruiz-Padillo [48], a multicriteria decision methodology was used for the evaluation of traffic noise. In another similar work, equivalent traffic flow, equivalent vehicle speed, and honking have been used as input for the implementation of a fuzzy logic for the prediction of road traffic noise [46]. Regarding the usage of GA for road traffic noise prediction, relevant works are [49, 50], and [51], in which this type of AI approach has been successfully implemented for the prediction of road traffic noise.
It is interesting to note how the implementation of machine learning models generally relies on the same road traffic parameters used in historical models, in order to find a predicted noise level at the receiver. Some works introduced new variables, like the presence of buildings in [37] and the type of pavement on the road in [41], but there is still not a comprehensive contribution on this sense. Moreover, another aspect to consider is that, up to the authors knowledge, there is not any AI model working separately on noise emissions or sound propagation, probably because the independent variables to take into consideration to build such a model would not be easily retrieved. These aspects will surely be important in the future development of machine learning techniques for road traffic noise prediction. Anyway, it should be underlined that since the relationships between emission and relevant variables are monotonic, the most interesting contribution of AI tools will be on the improvement of the propagation modelling, where the commonly used approaches can be improved.
NEMs Review
There are several models that, rather than estimating the overall road traffic noise by regression on field data at the receiver, focus on estimating the noise levels produced by vehicles through the use of Noise Emission Models (i.e. NEMs) aimed at assessing the sound power level \(L_{W}\) of the source. In the following, the single vehicle approach will be presented together with the potential applications of such an assessment. In addition, the possible methods to move from single vehicle to traffic flow noise emissions will be resumed at the end of the section. The main parameters of the presented models are reported in Appendix.
Microscopic Approach: Single Vehicle Noise Emission
Lelong et al. NEM
In 1999, Lelong et al. developed an empirical model to estimate the sound power level \(L_{W}\) of the individual vehicle, distinguishing it in two different equations for light and heavy vehicles, and taking into account three driving conditions: cruise driving, acceleration, and deceleration conditions [52]. Equation (24) reports the general equation used in Lelong’s model for the light vehicle and equation (25) the one used for the heavy vehicle.
One could notice the different dependence of these sound power levels on speed, logarithmic for light vehicles and linear for heavy vehicles.
SonRoad NEM
In 2004, a NEM calibrated in Switzerland, also known as SonRoad, was developed to estimate the sound power level \(L_{W}\) of a single vehicle using the vehicle type, speed, grade of the road (i.e. \(\Delta _G\)), and surface type (i.e. \(\Delta _{BG}\)) as main inputs [53]. In particular, two different equations are used to assess the sound power level for light and heavy vehicles as reported respectively in Eqs. (26) and (27).
Harmonoise NEM
A very important NEM, from which subsequent developments led to the model canonically used in Europe, is the Harmonoise one, in which the sound power level \(L_{W}\) is estimated for five different vehicle categories (i.e. light, medium-heavy, heavy, special (tractors, trucks), and motorbikes). It is one of the first model to separate the contribution of engine noise, also called propulsion noise \(L_{W,propulsion}\), from that of tyre rolling on the road surface \(L_{W,rolling}\), using coefficients as \(a_P\) and \(b_P\) and \(a_R\) and \(b_R\) that also lead to compute such contributions for each third octave band ƒ from 25Hz to 10kHz. Moreover, Harmonoise’s model introduces a correction term to propulsion sound power level \(L_{W,propulsion}\) to take into account acceleration or deceleration values between -2 and +2 m/s\(^2\) factor for (i.e. \(\Delta _{acc}\)) [54]. Model equations are reported in formulas (28) and (29):
Finally, the overall sound power level of single vehicle is computed per each category as in formula (30):
REMEL NEM for US-FHWA Model
In the 90 s, a model was developed for the United States of America by the U.S. Department of Transportation, Research and Special Programs Administration, in support of the Federal Highway Administration, also referred to as the FHWA model [55]. The main objective of their work was to update the previous technologies used and to develop a new highway traffic noise prediction model. Over the years, several updates to this model have been produced until the most recent, which was issued in September 2021 [56]. The formula to compute the maximum noise emission energy for a single vehicle pass-by is given in the technical manual issued by the U.S. Department of Transportation, Research and Special Programs Administration, as follows:
where \(v_i\) is the vehicle speed in kilometers per hour for the i-th vehicle and A, B, and C are variables that depend on vehicle type, pavement type and engine throttle, and they are defined in the manual itself. \(E_A\) is then converted in dB scale as follows:
Since the FHWA RTNM computes various adjustment factors on a one-third octave band basis, the characterization of noise emission levels is then refined.
where f is the nominal frequency (in Hz) of the considered third octave band and \(D_1\) to \(J_2\) are parameters that depend on vehicle type, pavement type, and engine throttle. They are not reported in this work for the sake of brevity, but they are defined in the above mentioned manual [56]. A, B, and C coefficients control the overall level, while \(D_1\) to \(J_2\) control the spectral shape of the emissions.
NMPB NEM
In 1996, the first release of a Road Traffic Noise predictive model in France was published. The model known as NMPB, that stands for “Nouvelle Méthode de Prévision du Bruit des Routes” has been updated several times, up to the 2008 edition, as reported in the work of Dutilleux et al. in [57]. The model is based on the estimation of the source sound power level considering the contributions of rolling (\(L_r\)) and propulsion (\(L_p\)) [58, 59]. These components are determined through fit of experimental data obtained with pass-by tests, in which the receiver is at a lateral distance from the road of 7.5 m and at a height of 1.2 m above the ground. From the measurements of the maximum A-weighted pass-by levels, the model parameters are obtained fitting the following relationship:
where \(L_p\) and \(L_r\) represent the power level for propulsion and the sound emission level for rolling, respectively. Regarding the rolling contribution, different formulations are proposed for light and heavy vehicles, according to Eqs. (35) and (36).
The same differences can be noticed for the propulsion contribution.
The power level for an individual vehicle is thus obtained from the level \(L_{A,max}\), using the following back-propagation formula:
where
Measurements were carried out on a large number of samples. Specifically, the measurement campaign involved 450 sites for light vehicles and 150 sites for heavy ones [57].
CNOSSOS-EU NEM
More recently, the European Union delivered the so called “CNOSSOS model”, which stands for “Common NOise aSSessment methOdS”. This model is inspired by the Harmonoise model presented in “Harmonoise NEM” section and aims at assessing the emission of the major noise sources, both in urban and extraurban areas, including road traffic [60]. It has as a main goal to harmonize the procedures and enable all member countries to create noise maps as imposed by the regulation 2002/49/CE. The model assesses the source power level \(L_{W}\) for each band of octave i, for five categories of vehicles m: light, medium-heavy, and heavy vehicles, powered two-wheelers, and alternative propulsion cars. Different correction terms are considered to take into account the effects on the noise emissions of studded tyres, air temperature, road gradient, acceleration and deceleration phase, type of road surface, and so on. The relationships used to compute the sound power level due to propulsion and rolling noise of the individual vehicle are given in Eqs. (41) and (42). They are calculated for each i-th octave band from 125 Hz to 4 kHz.
The coefficients \(A_{P,m}\), \(B_{P,m}\), \(A_{R,m}\), and \(B_{R,m}\) change with respect to each octave band and to vehicles’ category considered. \(v_{ref}\) is a reference speed that in the CNOSSOS model is set at 70 km/h, while \(v_{m}\) is the average speed of the vehicle’s category considered. The coefficients for categories from 1 to 4 have been firstly published in [60] and then amended in [61], in order to take into account surface reflection effects. Latest official version of the coefficients is available in [62]. In addition, several works in literature also aim to provide such coefficients for vehicle categories not yet included in the CNOSSOS model. For example, regarding electric vehicles in [63] and in [64], Pallas et al. provided some correction terms to be applied to obtain the emission of electrically powered vehicles. In [65], Licitra et al. proposed the coefficients \(A_{P,m}\), \(B_{P,m}\), \(A_{R,m}\), and \(B_{R,m}\) to be applied when referring to electric vehicles, computed after fitting statistical pass-byes for a reference pavement and compared with results obtained with a crumb rubber pavement. A list of the main coefficients to be used for CNOSSOS application is given in Appendix. The use of mean speed for each vehicle’s category makes the CNOSSOS’ NEM a not fully microscopic model, as it does not consider the individual car’s speed, even though the single vehicle sound power level is estimated separately before merging all the vehicles emissions in the traffic flow line source, as will be described in the next subsection.
The propulsion and rolling overall sound power levels are computed as follows:
Finally, one can compute the overall source sound power level \(L_{W,m}\) for each single vehicle’s category m as
ASJ-RTN NEM
In 1975, the Acoustic Society of Japan delivered the first release of a road traffic noise predictive model for free-flowing conditions, also referred to as ASJ-RTN [66, 67]. The ASJ-RTN has been updated several times up to 2018, following research’s results, the promulgation of different regulations and to consider wave-based computational methods for sound propagation. In [68], the history of the development of this model is reported, up to the 2018 version. This model estimates \(L_{W,A}\) for three categories of vehicles, i.e. motorcycles, light vehicles, and heavy vehicles, using their average speed as input variable. Moreover, some correction terms to consider the type of road surface, the slope, and the directivity factor can be applied [69]. The general equation of ASJ-RTN is reported in (46):
where a and b are regression coefficient and C is a corrective factor that includes terms for road gradient, sound radiation directivity, and other factors. Parameters a, b, and C are given as a function of flow condition (steady, non-steady, deceleration), speed range, category of vehicle, and pavement typology.
Vehicle Noise Specific Power
Recently, a Vehicle Noise Specific Power (VNSP) model has been developed by Pascale et al. with the aim of assessing the sound power level \(L_{W}\) considering vehicle motorization. VNSP establishes a fundamental relationship between \(L_{W}\) and speed, with respect to three types of motorization of cars (diesel, petrol, and hybrid), by a non-linear regression on power levels measured through the statistical pass-by standard procedure. As in CNOSSOS and Harmonoise models, the engine contribution is assumed to have a linear dependence by the speed, while the rolling noise is modelled with a logarithmic function of the speed. More details are reported in [12]. The equation used is reported below (47):
The speed used as a reference is the same as CNOSSOS’ one (i.e 70 km/h). The main difference between VNSP and the previous models is that VNSP adopts the overall sound power level \(L_{W}\), instead of fitting the function per each octave band or third octave band. A practical application of this model and the comparison with results obtained with other NEMs are presented in [13•].
Micro to Macro Transition: from Single Vehicle to Traffic Flow Emission
To achieve an overall assessment of the road traffic noise levels, the single vehicle emission needs to be extended at the road segment level. The sound power level \(L_{W}\) of all the vehicles must be merged together, to provide assessment of the traffic flow emission.
The CNOSSOS model provides an approach to move from the single point source to a linear source by considering multiple passing-by vehicles on the road [60]. The sound power level of traffic in the m-th category per meter per frequency band of the linear source is given in (48):
where \(L_{w,i,m}\) is the instantaneous directional sound power level in a semi-free field of a single vehicle, calculated for each i octave band from 125 Hz to 4 kHz and for each vehicle’s category m. Hourly traffic flow data \(Q_m\) and average speed \(v_m\) are considered for each vehicle category, even if in some cases the maximum legal speed for the vehicle category is used.
Another way to move from single vehicle to traffic flow is to consider the acoustic energy immitted at the receiver by the single pass-by by means of SEL calculation and then to sum up the SELs of all the vehicles. In several models and applications (for example in [68, 70, 71, 72•, 73]), such a procedure is used to calculate the SELs of the vehicles travelling on a given road segment, to assess the overall traffic flow emission.
Propagation and Assessment at the Receiver
Propagation Models
Once the sound source is characterized by its emission, the vast majority of noise propagation models for noise mapping begin by discretizing it into point sources. In the CNOSSOS-EU model, for instance, a car may be represented as a point source at a height of 0.05 m. Subsequently, a road is discretized into an array of point sources, situated along its central axis, at 0.05 m height and at regular intervals dependent on the distance between the source and the receiver. The greater this distance, the larger the interval between point sources can be while maintaining the same level of prediction accuracy. Then, if multiple point sources represent the same source, each of these points bears only a fraction of their energy. Once the source is discretized, the next step involves modelling the propagation between the point sources and the receivers within the domain.
Similar to the discretization process, there is a homogenization of models for noise mapping due to a well-balanced trade-off between precision and computational cost in pathfinding methods. Pathfinding methods involve finding the set of shortest paths between a source and a receiver. In the case of a direct field, it is straightforward—a straight-line segment between these two points. If a building is present between them, it involves three segments passing over and around the sides of the building. In these models, there is an inability to represent buildings as arches; the building must be solid, a concept sometimes referred to as 2.5D. When considering reflections, the simulation needs to account for the interaction of sound waves with building surfaces, leading to multiple paths and interactions that contribute to the overall sound field at a receiver. Once these paths are identified, the next step is to apply a model of sound wave attenuation to each of these paths. The literature contains numerous comparisons between the most commonly used models [74,75,76,77,78].
Most noise propagation models account for the following effects on attenuation:
-
Geometric divergence: This refers to the attenuation resulting from the loss of energy as the distance increases (-6 dB/doubling of distance for a point source).
-
Atmospheric absorption: This is influenced by the humidity and temperature of the atmosphere.
-
Absorption and/or reflection of the wave by the ground: This depends on the type of soil.
-
Terrain shape and topography: The overall form of the terrain and its topographical features can affect sound propagation.
-
Meteorological effects: Wind and temperature influence the speed of the sound wave, and so their gradients have a significant impact on the sound level at the receiver. These are sometimes simplified, as in CNOSSOS-EU or ISO 9613-2, to two distinct conditions, either no effects on propagation or conditions favourable to propagation.
-
Diffraction effects: These occur at the edges of buildings, acoustic walls, or the ground and can influence the path of sound waves.
It is crucial to emphasize that, in the context of most large-scale studies, uncertainties in the results are predominantly influenced by factors such as input data and exposure calculations rather than the intricacies of the models themselves [79]. Despite the inherent complexities, numerous studies with detailed input data have shown acceptable agreement between measurements and simulations in the context of city scale long-term averaged noise levels.
Assessment at the Receiver
All the models presented in the foregoing sections and subsections can be effectively used in order to investigate several types of road traffic noise’s impacts on the surroundings. Depending on which specific feature has to be analyzed or highlighted through the analysis itself, or in general what is the aim of the study, model outputs could be used to produce different kinds of impacts’ indicators. These impacts affect those who can be identified as “receivers” of road traffic noise, and they can be assessed either in a direct way, estimating the energetic indicators defined by national and international regulation, or indirect, evaluating secondary effects, such as health consequences, external costs, and influence on property prices. In this subsection, three different macro-categories of assessments at the receiver will be introduced and explored, namely the usual regulation indicators, the health effects, and the external costs.
Common Regulation Indicators
A first and most obvious desired derivable from the application of RTNMs could be the computation of noise indicators usually used by regulations. Concerning European countries, for instance, the standard indicators to be used for strategic noise mapping and for national regulation issues have been defined in the “Environmental Noise Directive” [80]. The most relevant noise level indicator is called “acoustic descriptor day-evening-night”, computed as in the following formula:
This formulation computes the different times regarding the amount of hours for each period (12 h for the day, 4 h for the evening, and 8 h for the night) and adds some penalties for the noise emitted at evening and night times. European countries must use this indicators for strategic map duties, for which all the main sources in urban areas must be assessed, with special care to road traffic noise. This mapping is usually performed by using algorithms for emission and propagation of noise coming from roads, railways, airports, and industrial sources, commonly included in commercial software. As for road traffic noise modelling, it is evident that a usable and reliable model—that could be largely used and accepted—has to produce results comparable with the acoustic descriptor used by the regulations. There are two ways to get such type of results: the model can supply an aggregated output of noise level comparable with the time periods of regulations (like in [81]) or give as output a time dependent sound pressure level \(L_{p}\), which has to be subsequently aggregated according to the time period required. As reported in the previous sections, some RTNMs do not offer as output the noise indicators as identified in the regulations, but rather some of them allow the calculation of pressure levels as a function of time, later to be aggregated into summary indicators, or percentile sound pressure levels (i.e. \(L_{night}\), \(L_{A,10}\), \(L_{A,50}\), \(L_{A,90}\)).
Exposure and Effects on Human Health (DALYs)
Originally launched by the World Bank and backed by the World Health Organization as a measure of the global burden of disease, DALYs (disability adjusted life years) have been extensively used in literature to assess the influence of several pollutants on the life of citizens all through the World [82, 83]. Noise has been one of these pollutants, especially in the recent past, due to its pervasiveness and to the constant increasing number of people exposed to high levels of noise. DALYs quantify the amount of impact by suggesting how many years of life people lose due to the exposure to the analyzed pollutant. In [84], it is reported an estimation of DALYs due to noise in Netherland, but it is incorporated to the estimation of DALYS due to the more generic air pollution. In detail, it is reported how particulate air pollution accounts for 60% of DALYs, and noise for 24%, with an amount of 17,700 DALYs (only for noise) annoyance, 10,990 to sleep disturbance, 50 for ischaemic heart disease (IHD), and 10 DALYs for mortality related to noise. In 2011, WHO Europe published a work where the impact of noise in terms of DALYs was evident [85]: more than 1,700,000 DALYs were lost in EU member states and other Western European countries for heart and blood diseases, sleep disturbances, tinnitus, and annoyance. In [86], a comprehensive study of effects on health of noise is reported. A correlation between these estimated DALYs and a more punctual noise evaluation on urban context could result in useful indicators to highlight the profound impact noise has nowadays on our lives. The DALYs approach also reveals how dramatic is the impact of noise on populations in terms of economic impact on the population.
External Costs of Transportation
A proper characterization of environmental noise—especially on urban areas—also takes into account the externalities of the noise itself. Whether the negative externalities of road transportation are easier to identify (environmental and road damage, accidents, congestion, and oil dependence) and their relative costs are subject of policy attention [87], the economic costs of noise are not directly addressed and not commonly investigated. Some papers consider a single-agent exposure by proposing an activity-based assessment [88••] and possible indicators for construction sites noise exposure impact [89]. As for airport noise, examples of noise cost assessment can be found in [90,91,92].
Regarding the road traffic noise, the costs are mainly investigated in terms of health cost. Many works show the direct correlation between noise and health problems like annoyance, depression and anxiety [93,94,95,96], sleep disturbance [93, 97,98,99,100], and cardiovascular diseases [101,102,103]. Out of these correlations is immediate to retrieve externalities in terms of costs on national health systems. A different group of studies relates the noise level to the variation of the prices of the estates, identifying how properties on quieter places are more expensive than properties on noisy ones. In [104], a linear regression technique is used to evaluate and characterize the influence of surface street traffic on both single-family houses and multi-unit rental residential property, obtaining different results for the two types of properties. In [105], a theoretical model of evaluation of environmental externalities based on the analysis of real estate prices is provided. This work, in particular, presents a comprehensive literature review of works evaluating the reduction of real estate values for increasing of noise pollution in many American and EU cities. The percentage value spans from a minimum of 0.22% to a maximum of 1.45%. The work of Wilhemssons [106] also shows a theoretical model to extract a precise correlation between the average noise level (dBA) and the prices of estates in Stockholm. Such approaches evaluate the noise level as final entities influencing the externalities’ severity and request a noise measurements or a theoretical inference of the noise level itself. The described actions all take in consideration, to assess noise levels, the indicators commonly used in scientific literature (\(L_{day}\), \(L_{evening}\), \(L_{night}\), \(L_{den}\)), which report the average noise level exposure during day specific sections.
A different approach is the possibility to infer the drop or raising of selling or renting estate pricing per dB. In [107], it is reported an interim EU-wide economic value of 23.5 euros/dBA/household/year. Two different approaches are then possible: the computation of the overall noise level on a certain area as the contribution of the noise coming from each single vehicle transiting, and then the corresponding externalities on population living in the area, in terms of health issues and economic evaluation of estates (bottom-top approach). On the other hand, it would be possible to get an indicator correlating the noise level to an economic value to easily infer how it could impact on the externalities on populations. It is interesting to note how the precise evaluation of externalities of the noise in a certain area can help policy makers in making choice between the possible measures to mitigate noise.
Conclusions
The development of effective road traffic noise modelling tools has been a central point in the agenda of the acoustic scientific community in the last decades. The evolution of the adopted techniques has been presented in this paper, starting from the historical formulas, obtained by regression on large datasets collected in different sites. These early models exploited the dependence of traffic noise level from vehicle flows and vehicle category, sometimes including additional parameters and corrections to take into account mean speed of the flow, road grade and pavement, presence of shielding and reflecting vertical surfaces, etc. The latest trend of Artificial Intelligence and machine learning techniques for road traffic noise modelling has been also reported, resuming the most popular approaches that are mainly artificial neural network, random forest, support vector regression, among others. The usage of these techniques is obviously strongly dependent on availability of reliable training data that must be used for the calibration and validation of the models. Despite the popularity of these techniques, in the acoustic scientific community, they are considered niche models and they are not included yet in any regulation or standard document, probably because of the strong site-dependence feature of these models that leads to difficulties in developing a tool that can be easily used anywhere. A review of single vehicle noise emissions modelling has been extensively reported in the central part of the paper. The engine and rolling contributions assessment has been reviewed, considering the most popular NEMs. In particular, the strong relation between emission and vehicle speed has been highlighted, together with the recurrent correction coefficients, usually related to road pavement, grade, and acceleration. The ways the single vehicle emission can be merged in a linear source mimicking the road traffic have been briefly reported to describe the transition from a microscopic simulation to a macroscopic description of the phenomenon. Finally, the propagation and the assessment at the receivers have been summarized to complete the road traffic noise modelling and assessment standard scheme, citing the most popular uses of these predictions, such as regulation descriptors calculation, noise mapping, exposure analysis, and health risk assessments. The problem of providing quality input data for any road traffic model presented in this review is crucial. Activity models can be developed and used for this purpose, also including dynamic approaches, able to provide the temporal variation of the input data and, consequently, of the simulated noise levels.
The main conclusion of this review is that road traffic noise modelling is a wide field of study that may include several approaches based on different techniques. The single vehicle noise emission assessment is mandatory for pursuing a microscopic approach that can be easily used for noise pollution modelling and control, for instance in eco-routing applications and traffic signal setting design. On the contrary, collective models that can be based on large dataset statistical regressions or machine learning tools are dependent on the databases used for the calibration and validation, introducing a potential limitation on the extension of these models to any site under study.
References
Papers of particular interest, published recently, have been highlighted as: • Of importance •• Of major importance
Agency European Environment. Environmental noise in Europe -, 22/2019. Luxembourg: Publications Office of the European Union; 2020. p. 2020.
Héroux ME, Babisch W, Belojevic G, Brink M, Janssen S, Lercher P, et al. WHO environmental noise guidelines for the European region. Euronoise. 2015;2015:2589–93.
World Health Organization. Environmental noise guidelines for the European region. Regional Office for Europe: World Health Organization; 2018.
European Commission. Pathway to a healthy planet for all. EU action plan: ’towards zero pollution for air, water and soil’. COM(2021) 400 final. 2021; p.22.
Steele C. A critical review of some traffic noise prediction models. Appl Acoust. 2001;62(3):271–87.
Mann S, Singh G. Traffic noise monitoring and modelling–an overview. Environ Sci Pollut Res. 2022;29(37):55568–79.
Ibili F, Adanu EK, Adams CA, Andam-Akorful SA, Turay SS, Ajayi SA. Traffic noise models and noise guidelines: a review. Noise Vib Worldw. 2022;53(1–2):65–79.
Garg N, Maji S. A critical review of principal traffic noise models: strategies and implications. Environ Impact Assess Rev. 2014;46:68–81.
Rajakumara H, Gowda RM. Road traffic noise prediction models: a review. Int J Sustain Dev Plan. 2008;3(3):257–71.
•• Rey-Gozalo G, BarrigónMorillas JM, MontesGonzález D. Analysis and Management of Current Road Traffic Noise. Curr Pollut Rep. 2022;8(4):315–27. This review paper presents the state of the art about road traffic noise control measures, within the framework of countries regulation, considering the possible interventions at the source and at the propagation path and receiver.
Can A, Aumond P. Estimation of road traffic noise emissions: the influence of speed and acceleration. Transp Res Part D: Transp Environ. 2018;58:155–71.
Pascale A, Fernandes P, Bahmankhah B, Macedo E, Guarnaccia C, Coelho MCA, vehicle noise specific power concept. In: Forum on Integrated and Sustainable Transportation Systems (FISTS). IEEE. 2020;2020:170–5.
• Pascale A, Fernandes P, Guarnaccia C, Coelho MC. A study on vehicle Noise Emission Modelling: correlation with air pollutant emissions, impact of kinematic variables and critical hotspots. Sci Total Environ. 2021;787:147647. In this paper, 7 vehicle noise emission models and the VSP methodology are used to estimate noise and pollutants emissions of a vehicle along different routes, to highlight critical hotspots.
Graziuso G, Mancini S, Guarnaccia C. Comparison of single vehicle noise emission models in simulations and in a real case study by means of quantitative indicators. Int J Mech. 2020;14:198–207.
Bandeira JM, Guarnaccia C, Fernandes P, Coelho MC. Advanced impact integration platform for cooperative road use. Int J Intell Transp Syst Res. 2018;16:1–15.
Di Pace R, Storani F, Guarnaccia C, de Luca S. Signal setting design to reduce noise emissions in a connected environment. Physica A: Statistical Mechanics and its Applications; 2023. p. 129328.
• Rey-Gozalo G, Aumond P, Can A. Variability in sound power levels: implications for static and dynamic traffic models. Transp Res D Transp Environ. 2020;84:102339. In this paper, road traffic noise emission levels calculated through usual static noise prediction models are corrected using a factor that depends on the variance of the residuals distribution.
Bolt B, Newman i, Bolt RH, Rosenblith WA. Handbook of Acoustic Noise Control. No. v. 1 in Handbook of Acoustic Noise Control. Wright Air Development Center, Air Research and Development Command, United States Air Force; 1953. Available from: https://books.google.it/books?id=BOZSaHASDOoC.
Nickson A. Can community reaction to increased traffic noise be forecast? Proceeding of 5th International Congress on Acoustics; 1965.
Johnson D, Saunders E. The evaluation of noise from freely flowing road traffic. J Sound Vib. 1968;7(2):287–309.
Galloway WJ, Clark WE, Kerrick JS. Highway noise measurement, simulation, and mixed reactions. NCHRP Rep. 1969;78.
Burgess M. Urban traffic noise prediction from measurements in the metropolitan area of Sydney. Appl Acoust. 1977;10.
Griffiths I, Langdon FJ. Subjective response to road traffic noise. J Sound Vib. 1968;8(1):16–32.
Fagotti C, Poggi A. Traffic noise abatement strategies: the analysis of real case not really effective. In: Proceeding of 18th International Congress for Noise Abatement; 1995. p. 223–233.
Centre Scientifique et Technique du Batiment. Etude théorique et expérimentale de la propagation acoustique. Revue d’Acoustique. 1991;70.
Guarnaccia C. Advanced tools for traffic noise modelling and prediction. WSEAS Trans Syst. 2013;12(2):121–30.
Rossi D, Mascolo A, Guarnaccia C. Calibration and validation of a measurements-independent model for road traffic noise assessment. Appl Sci. 2023;13(10):6168.
Department of Transport, UK Welsh Office. Calculation of road traffic noise. 1988.
BUNDESMINISTER FV, WOHNUNGSWESEN B. Richtlinien für den Lärmschutz an Straßen (RLS 90). Verkehrsblatt: Amtsblatt des Bundesministers für Verkehr der Bundesrepublik Deutschland (VkBl) Nr. 1990;7.
Cannelli G, Glück K, Santoboni S. A mathematical model for evaluation and prediction of the mean energy level of traffic noise in Italian towns. Acta Acust Acust. 1983;53(1):31–6.
Cocchi A, Farina A, Lopes G. Modelli matematici per la previsione del rumore stradale: verifica ed affinamento del modello CNR in base a rilievi sperimentali nella città di Bologna. In: Atti XIX Convegno Nazionale AIA, Napoli; 1991.
Suksaard T, Sukasem P, Tabucanon SM, Aoi I, Shirai K, Tanaka H. Road traffic noise prediction model in Thailand. Appl Acoust. 1999;58(2):123–30. https://doi.org/10.1016/S0003-682X(98)00069-3.
Li B, Tao S, Dawson R, Cao J, Lam K. A GIS based road traffic noise prediction model. Appl Acoust. 2002;63(6):679–91.
Nielsen HL. Road traffic noise: Nordic prediction method. Stationery Office: Temanord Series; 1997.
Codur MY, Atalay A, Unal A. Performance evaluation of the ANN and ANFIS models in urban traffic noise prediction. Fresenius Environ Bull. 2017;26:4254–60.
Hamad K, Khalil MA, Shanableh A. Modeling roadway traffic noise in a hot climate using artificial neural networks. Transp Res Part D: Transp Environ. 2017;53:161–77.
Mansourkhaki A, Berangi M, Haghiri M, Haghani M. A neural network noise prediction model for Tehran urban roads. J Environ Eng Landsc Manag. 2018;26(2):88–97.
• Umar IK, Adamu M, Mostafa N, Riaz MS, Haruna SI, Hamza MF, et al. The state-of-the-art in the application of artificial intelligence-based models for traffic noise prediction: a bibliographic overview. Cogent Eng. 2024;11(1):2297508. This paper presents a review of artificial intelligence (AI)-based models for road traffic noise assessment, analyzing fifty published articles from 2007 to 2023, regarding several aspects, including input data and modeling techniques.
Kumar P, Nigam S, Kumar N. Vehicular traffic noise modeling using artificial neural network approach. Transp Res Part C Emerg Technol. 2014;40:111–22.
Garg N, Mangal S, Saini P, Dhiman P, Maji S. Comparison of ANN and analytical models in traffic noise modeling and predictions. Acoust Aust. 2015;43:179–89.
Cirianni F, Leonardi G. Artificial neural network for traffic noise modelling. ARPN J Eng Appl Sci. 2015;10(22):10413–9.
Bravo-Moncayo L, Lucio-Naranjo J, Chávez M, Pavón-García I, Garzón C. A machine learning approach for traffic-noise annoyance assessment. Appl Acoust. 2019;156:262–70.
Nedic V, Despotovic D, Cvetanovic S, Despotovic M, Babic S. Comparison of classical statistical methods and artificial neural network in traffic noise prediction. Environ Impact Assess Rev. 2014;49:24–30.
Genaro N, Torija A, Ramos-Ridao A, Requena I, Ruiz DP, Zamorano M. A neural network based model for urban noise prediction. J Acoust Soc Am. 2010;128(4):1738–46.
Cirianni F, Leonardi G. Road traffic noise prediction models in the metropolitan area of the Strait of Messina. In: Proceedings of the Institution of Civil Engineers-Transport. vol. 164. Thomas Telford Ltd; 2011. p. 231–239.
Sharma A, Vijay R, Bodhe G, Malik L. Adoptive neuro-fuzzy inference system for traffic noise prediction. Int J Comput Appl. 2014;98(13).
Sharma A, Vijay R, Bodhe G, Malik L. An adaptive neuro-fuzzy interface system model for traffic classification and noise prediction. Soft Comput. 2018;22:1891–902.
Ruiz-Padillo A, Ruiz DP, Torija AJ, Ramos-Ridao Á. Selection of suitable alternatives to reduce the environmental impact of road traffic noise using a fuzzy multi-criteria decision model. Environ Impact Assess Rev. 2016;61:8–18.
Rahmani S, Mousavi SM, Kamali MJ. Modeling of road-traffic noise with the use of genetic algorithm. Appl Soft Comput. 2011;11(1):1008–13.
Khouban L, Ghaiyoomi AA, Teshnehlab M, Ashlaghi AT, Abbaspour M, Nassiri P. Combination of artificial neural networks and genetic algorithm - gamma test method in prediction of road traffic noise. Environ Eng Manag J (EEMJ). 2015;14(4).
Chen P, Xu L, Tang Q, Shang L, Liu W. Research on prediction model of tractor sound quality based on genetic algorithm. Appl Acoust. 2022;185:108411.
Lelong J. Vehicle noise emission: evaluation of tyre/road and motor-noise contributions. In: Proceedings of Internoise 99, Fort Lauderdale, Florida, USA, 6-8 December 1999, Vol. 1; 1999.
Heutschi K. SonRoad: new Swiss road traffic noise model. Acta Acust Acust. 2004;90(3):548–54.
Watts G. Harmonoise prediction model for road traffic noise. Transp Res Lab; 2005.
Fleming GG, Rapoza AS, Lee CS. Development of national reference energy mean emission levels for the FHWA traffic noise model (FHWA TNM), version 1.0. United States. Federal Highway Administration; 1995.
Federal HighwayAdmnistritaion OoNE. Technical Manual, Traffic Noise Model 3.1. U.S. Department of Transportation; 2021.
Dutilleux G, Defrance J, Ecotière D, Gauvreau B, Bérengier M, Besnard F, et al. NMPB-routes-2008: the revision of the French method for road traffic noise prediction. Acta Acust Acust. 2010;96(3):452–62.
Besnard F, Hamet JF, Lelong J, LeDuc E, Guizard V, Fürst N, et al. Road noise prediction 1-calculating sound emissions from road traffic. Bagneux: SETRA; 2009.
Hamet JF, Besnard F, Doisy S, Lelong J, Le Duc E. New vehicle noise emission for French traffic noise prediction. Appl Acoust. 2010;71(9):861–9.
Kephalopoulos S, Paviotti M, Anfosso-Lédée F. Common noise assessment methods in Europe (CNOSSOS-EU). Publications Office of the European Union; 2012.
Kok A, van Beek A. Amendments for CNOSSOS-EU: description of issues and proposed solutions. RIVM Lett Rep. 2019.
Commission Delegated Directive (EU) of 21.12.2020 amending, for the purposes of adapting to scientific and technical progress, Annex II to Directive 2002/49/EC of the European Parliament and of the Council as regards common noise assessment methods, 2020.
Pallas MA, Berengier M, Chatagnon R, Czuka M, Conter M, Muirhead M. Towards a model for electric vehicle noise emission in the European prediction method CNOSSOS-EU. Appl Acoust. 2016;113:89–101.
Czuka M, Pallas MA, Morgan P, Conter M. Impact of potential and dedicated tyres of electric vehicles on the tyre-road noise and connection to the EU noise label. Transp Res Proc. 2016;14:2678–87.
Licitra G, Bernardini M, Moreno R, Bianco F, Fredianelli L. CNOSSOS-EU coefficients for electric vehicle noise emission. Appl Acoust. 2023;211:109511.
Ishii K. Prediction of road traffic noise (part 1), method of practical calculation. J Acoust Soc Jpn. 1975;31:507–17. (In Japanese).
Ikegaya K. Mathematical models and estimation for predicting the road traffic noise. J Acoust Soc Jpn. 1975;31:559–65. (In Japanese).
Sakamoto S. Road traffic noise prediction model ASJ RTN-Model 2018: report of the research committee on road traffic noise. Acoust Sci Technol. 2020;41(3):529–89. https://doi.org/10.1250/ast.41.529.
Yamamoto K. Road traffic noise prediction model ASJ RTN-Model 2008: report of the research committee on road traffic noise. Acoust Sci Technol. 2010;31(1):2–55.
Quartieri J, Iannone G, Guarnaccia C. On the improvement of statistical traffic noise prediction tools. In: Proceedings of the 11th WSEAS International Conference on Acoustics & Music: Theory & Applications (AMTA’10), Iasi, Romania; 2010. p. 201–207.
Guarnaccia C. EAgLE: equivalent acoustic level estimator proposal. Sensors. 2020;20(3):701.
• Pascale A, Macedo E, Guarnaccia C, Coelho MC. Smart mobility procedure for road traffic noise dynamic estimation by video analysis. Appl Acoust. 2023a;208:109381. This paper presents a microscopic road traffic noise model that considers single vehicle speed and category, obtained via video analysis automatic tool.
Pascale A, Guarnaccia C, Macedo E, Fernandes P, Miranda AI, Sargento S, et al. Road traffic noise monitoring in a Smart City: sensor and model-based approach. Transp Res Part D: Transp Environ. 2023b;125:103979.
Khan J, Ketzel M, Jensen SS, Gulliver J, Thysell E, Hertel O. Comparison of Road Traffic Noise prediction models: CNOSSOS-EU, Nord 2000 and TRANEX. Environ Pollut. 2021;270:116240.
Attenborough K, VanRenterghem T. Predicting outdoor sound. CRC Press; 2021.
Van Renterghem T, Botteldooren D. Landscaping for road traffic noise abatement: model validation. Environ Model Software. 2018;109:17–31.
Ecotiere D, Foy C, Dutilleux G. Comparison of engineering models of outdoor sound propagation: NMPB2008 and Harmonoise-Imagine. In: Acoustics 2012; 2012. .
Hart CR, Reznicek NJ, Wilson DK, Pettit CL, Nykaza ET. Comparisons between physics-based, engineering, and statistical learning models for outdoor sound propagation. J Acoust Soc Am. 2016;139(5):2640–55.
Aumond P, Can A, Mallet V, Gauvreau B, Guillaume G. Global sensitivity analysis for road traffic noise modelling. Appl Acoust. 2021;176:107899.
European Union. Directive 2002/49/EC relating to the Assessment and Management of Environmental Noise. Official Journal of the European Communities; 2002.
European Commission Directive. 2015/996 of 19 May 2015 establishing common noise assessment methods according to Directive 2002/49/EC of the European Parliament and of the Council. Official Journal of the European Communities; 2015.
World Bank. World Development Report 1993: investing in health, Volume1. The World Bank; 1993.
Murray CJ, Lopez AD, Organization WH. The global burden of disease: a comprehensive assessment of mortality and disability from diseases, injuries, and risk factors in 1990 and projected to 2020: summary. World Health Organization; 1996.
deHollander AE, Melse JM, Lebret E, Kramers PG. An aggregate public health indicator to represent the impact of multiple environmental exposures. Epidemiology. 1999; p. 606–617.
World Health Organization. Burden of disease from environmental noise: quantification of healthy life years lost in Europe. Regional Office for Europe: World Health Organization; 2011.
Stansfeld SA. Noise effects on health in the context of air pollution exposure. Int J Environ Res Public Health. 2015;12(10):12735–60.
Santos G, Behrendt H, Maconi L, Shirvani T, Teytelboym A. Part I: Externalities and economic policies in road transport. Res Transp Econ. 2010;28(1):2–45. https://doi.org/10.1016/j.retrec.2009.11.002.
•• Nygren J, LeBescond V, Can A, Aumond P, Gastineau P, Boij S, etal. Agent-specific, activity-based noise impact assessment using noise exposure cost. Sustain Cities Soc. 2024; p. 105278. This paper presents an agent-specific and activity-based method for traffic noise exposure, by merging agent-based simulation in MATSim, existing traffic noise prediction tools and noise exposure cost methodologies.
Hankach P, Le Bescond V, Gastineau P, Vandanjon PO, Can A, Aumond P. Individual-level activity-based modeling and indicators for assessing construction sites noise exposure in urban areas. Sustain Cities Soc. 2024;101:105188.
Nero G, Black JA. A critical examination of an airport noise mitigation scheme and an aircraft noise charge: the case of capacity expansion and externalities at Sydney (Kingsford Smith) airport. Transp Res Part D: Transp Environ. 2000;5(6):433–61.
Tomkins J, Topham N, Twomey J, Ward R. Noise versus access: the impact of an airport in an urban property market. Urban studies. 1998;35(2):243–58.
Ekici F, Orhan G, Gümüş Ö, Bahce AB. A policy on the externality problem and solution suggestions in air transportation: the environment and sustainability. Energy. 2022;258:124827.
Kim M, Chang SI, Seong JC, Holt JB, Park TH, Ko JH, et al. Road traffic noise: annoyance, sleep disturbance, and public health implications. Am J Prev Med. 2012;43(4):353–60.
Dzhambov AM, Lercher P. Road traffic noise exposure and depression/anxiety: an updated systematic review and meta-analysis. Int J Environ Res Public Health. 2019;16(21):4134.
De Kluizenaar Y, Janssen SA, Vos H, Salomons EM, Zhou H, Van den Berg F. Road traffic noise and annoyance: a quantification of the effect of quiet side exposure at dwellings. Int J Environ Res Public Health. 2013;10(6):2258–70.
Urban J, Máca V. Linking traffic noise, noise annoyance and life satisfaction: a case study. Int J Environ Res Public Health. 2013;10(5):1895–915.
Elmenhorst EM, Griefahn B, Rolny V, Basner M. Comparing the effects of road, railway, and aircraft noise on sleep: exposure-response relationships from pooled data of three laboratory studies. Int J Environ Res Public Health. 2019;16(6):1073.
Kawada T. Noise and health–sleep disturbance in adults. J Occup Health. 2011;53(6):413–6.
Muzet A. Environmental noise, sleep and health. Sleep Med Rev. 2007;11(2):135–42.
Foulkes L, McMillan D, Gregory AM. A bad night’s sleep on campus: an interview study of first-year university students with poor sleep quality. Sleep Health. 2019;5(3):280–7.
Fyhri A, Aasvang GM. Noise, sleep and poor health: modeling the relationship between road traffic noise and cardiovascular problems. Sci Total Environ. 2010;408(21):4935–42.
Sørensen M, Hvidberg M, Andersen Z, Nordsborg R, Lillelund K, Jakobsen J, et al. Road traffic noise and stroke: a prospective cohort study. Epidemiology. 2011;22(1):S51.
Münzel T, Gori T, Babisch W, Basner M. Cardiovascular effects of environmental noise exposure. Eur Heart J. 2014;35(13):829–36.
ELarsen J, PBlair J. Price effects of surface street traffic on residential property. Int J Hous Mark Anal. 2014;7(2):189–203.
Del Giudice V, De Paola P, Manganelli B, Forte F. The monetary valuation of environmental externalities through the analysis of real estate prices. Sustainability. 2017;9(2):229.
Wilhelmsson M. The impact of traffic noise on the values of single-family houses. J Environ Plan Manag. 2000;43(6):799–815.
Navrud S. The economic value of noise within the European union - a review and analysis of studies. Acta Acustica (Stuttgart). 2003;89(SUPP.).
Acknowledgements
C. Guarnaccia and D. Rossi acknowledge the support of the MOST - Sustainable Mobility National Research Center, funded by the European Union Next-GenerationEU (PIANO NAZIONALE DI RIPRESA E RESILIENZA (PNRR) - MISSIONE 4 COMPONENTE 2, INVESTIMENTO 1.4 - D.D. 1033 17/06/2022, CN00000023). This manuscript reflects only the authors’ views and opinions, neither the European Union nor the European Commission can be considered responsible for them.
Funding
Open access funding provided by Università degli Studi di Salerno within the CRUI-CARE Agreement.
Author information
Authors and Affiliations
Corresponding authors
Appendix: Main Coefficients of the Reviewed Models
Appendix: Main Coefficients of the Reviewed Models
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Guarnaccia, C., Mascolo, A., Aumond, P. et al. From Early to Recent Models: A Review of the Evolution of Road Traffic and Single Vehicles Noise Emission Modelling. Curr Pollution Rep 10, 662–683 (2024). https://doi.org/10.1007/s40726-024-00319-5
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40726-024-00319-5