Abstract
This paper presents the mean–variance (MV) model to solve power system reactive power dispatch problems with wind power integrated. The MV model considers the profit and risk simultaneously under the uncertain wind power (speed) environment. To describe this uncertain environment, the Latin hypercube sampling with Cholesky decomposition simulation method is used to sample uncertain wind speeds. An improved optimization algorithm, group search optimizer with intraspecific competition and lévy walk, is then used to optimize the MV model by introducing the risk tolerance parameter. The simulation is conducted based on the IEEE 30-bus power system, and the results demonstrate the effectiveness and validity of the proposed model and the optimization algorithm.
Similar content being viewed by others

1 Introduction
The optimal reactive power dispatch (ORPD) problem has played significant influence on the economical and secure operation of power system [1, 2]. It aims to seek optimal settings of control variables to minimize a specific objective function, while meeting a set of operational constraints. The control variables consist of both continuous and discrete variables, including generator voltage magnitudes, discrete tap settings of transformers and outputs of reactive compensation devices. The operational constraints are composed of equality and inequality constraints, presented in the power flow equations and the limits of bus voltages, transformer tap-settings and reactive power outputs. Therefore, the ORPD problem is a complex non-linear constrained optimization problem with a mixture of discrete and continuous variables [2].
Many conventional techniques based on mathematics have been applied in dealing with the ORPD problem, such as gradient-based searching method [3], interior point method [4] and quadratic programming [5]. However, these conventional methods cannot guarantee to find the global optimum because of the non-convex, non-differential and non-linear nature of the ORPD problem [6]. In the last decades, many evolutionary algorithms (EAs) have been used for the ORPD problem, such as genetic algorithm (GA) [6], evolutionary programming (EP) [1].
Recently, a novel optimization algorithm, called group search optimizer (GSO), was proposed in [7]. It is a swarm-based algorithm and inspired by animal searching behavior. GSO consists of three kinds of members, i.e., the producer, scroungers and rangers. The producer with the best fitness value acts as the leader and it adopts scanning mechanism to find the optimal resource in the searching space. Scroungers are always following the producer to enjoy the discovered resource. On the other hand, rangers employ random walk (RW) to perform ranging behavior to seek other distributed resources. Therefore, it is the rangers that maintain the group’s diversity to increase GSO’s possibility to escape from local optima. In [7], it has been proved that GSO outperforms other EAs, such as GA, PSO and EP, especially in terms of optimizing multi-modal benchmark functions.
However, GSO’s local searching ability is not satisfactory, as shown in its modest performance on optimizing unimodal functions [7]. In order to improve GSO’s local searching ability while maintaining its merit in global searching, we have proposed an improved GSO, group search optimizer with intraspecific competition and lévy walk (GSOICLW) [8], incorporating intraspecific competition (IC) [9] and lévy walk (LW) [10] into the GSO model. IC makes the scroungers strengthen local searching while stimulates more rangers to do global searching. Moreover, LW stimulates rangers to perform more efficient global searching than random walk (RW). In this paper, GSOICLW is adopted for the first time to solve the ORPD problem.
Recently, wind energy has been greatly utilized all over the world. It is definite that it is a good alternative to the traditional thermal power generation [11, 12]. However, its inherent nature of uncertainty determines it is extremely difficult to predict wind power [13–15]. Therefore, it is difficult to solve power system dispatch problems (DPs), including the ORPD problem, if large amount of wind power is integrated into power systems [12, 16, 17]. To the best of our knowledge, there have been mainly two methodologies on DPs with wind power integrated, i.e., the fuzzy and the probabilistic methods. In the fuzzy method, the wind power is deemed as the fuzzy variable, and the fuzzy set theory is used to model the corresponding DP issue [17, 18]. However, this method may be subjected to strong subjectiveness, although it can reflect dispatchers’ attitude to some extent [17, 18].
On the other hand, the probabilistic method usually assumes that wind speed, wind power or wind forecast error follows a specific probabilistic distribution. The wind speed is often assumed to follow the Weibull distribution [19, 20]. However, the period of DP and ORPD is very short, thus it is not suitable to use the Weibull distribution [19]. Ref. [19] indicates that the wind speed forecast error follows the Gaussian distribution in a short time, which demonstrates that this kind of distribution can be applied in DPs. Therefore, in this paper, the Gaussian distribution is applied to describe the uncertain wind speed in dealing with ORPD.
It is noted that the Monte Carlo (MC) simulation is often applied to generate wind power samples to conduct stochastic optimization in the probabilistic method [21–23]. However, the MC method is notorious for its heavy computation burden. Thanks to the Latin hypercube sampling with Cholesky decomposition (LHS-CD) simulation method, it obtains reliable results with a much smaller sample size, compared with the MC method [24]. Moreover, in terms of the stochastic optimization based on the probabilistic method, the objective function is usually the expected value. In this way, the final dispatch solution can obtain the best average value. However, the risk brought about by the solution is not considered under the uncertain environment. Thanks to the mean-variance (MV) model, which was proposed by Markowitz in the portfolio optimization problem, it can well measure both the profit and the risk brought a portfolio [25] in the uncertain environment. Therefore, we can use this model and LHS-CD to deal with the ORPD problem under the wind power environment.
Therefore, in this paper, the MV model and the sampling method LHS-CD are used to solve the ORPD problem with uncertain wind power integrated, and GSOICLW is applied to optimized the MV model to determine the dispatch solution. The modified IEEE 30-bus power system is employed for carrying out the simulation study to demonstrate the effectiveness of the MV model and the proposed optimization algorithm, GSOICLW.
The rest of the paper is organized as follows. Section 2 introduces the ORPD problem and the MV model. Section 3 presents the algorithm of GSO and GSOICLW. Section 4 carries out the experiments and discusses the simulation results. In the end, Sect. 5 draws conclusions.
2 Mean and variance model for optimal reactive power dispatch
2.1 Optimal reactive power dispatch (ORPD)
The ORPD problem aims to minimize an objective function, usually the transmission loss, by adjusting control variables while satisfying a set of equality and inequality constraints. As a result, the ORPD problem can be presented in the following formulation:
where J represents the objective function; x stands for the vector of state variables, including load-bus voltage VL, generator reactive power QG and apparent power flow S k ; the vector of control variables u comprises generator voltage VG, transformer tap setting T, reactive power output of compensative reactive power sources QC.
The objective function of the ORPD problem is transmission loss, which can be expressed as the following.
where g k represents the conductance of branch k; V i and V j are the voltage magnitude at bus i and j; and θ ij is the voltage angle difference between bus i and j; and N E is the total number of power system network branches.
As for constraints, g(u,x) represents the must of power balance in power systems, i.e., the generated active and reactive power must be balanced with their corresponding parts in consuming load.
where P Gi and P Di are the injected and demanded active power at bus i; Q Gi and Q Di are the injected and demanded reactive power; B ij and G ij are the transfer susceptance and conductance between bus i and j; N i stands for the total number of buses adjacent to bus i, including bus i.h(u,x) represents working limits of generators, power transformers and reactive power sources, and emphasizes power system security constraints, such as limits on bus voltages and branch apparent power flow. The details can be referred to [8].
The most common method used to deal with constrained optimization problem is adopting penalty function [2, 6]. Therefore, by adopting this method, the objective function in (1) can be expressed as
where \( \lambda_{{V_{i} }} \), \( \lambda_{{{\text{G}}_{i} }} \) and \( \lambda_{{S_{i} }} \) are penalty factors, and the limited value x lim i (\( x \in (P_{\text{G}} , \, V, \, Q_{\text{G}} , \, S_{k} ) \)) can be defined as the following:
2.2 Mean and variance model for optimal reactive power dispatch
The mean-variance (MV) model was firstly proposed by Markowitz in the portfolio optimization problem, which aimed to both maximize the profit and minimize the profit [25]. The MV model has also been used in power systems, Refs. [26, 27] have applied this model to solve the self-scheduling problem under uncertain electricity markets. The effect of risk has been explicitly modelled taken the variance of the market-clearing prices into consideration to address the trade-off of maximum profit versus minimum risk [26, 27]. In [28], the MV model has also been used to deal with the stochastic optimal power flow (OPF) problem with uncertain power demands. As the uncertain wind power is increasingly integrated into power system, it is of great difficulty to solve the DPs [19]. Therefore, in this paper, we use the MV model to analyze the ORPD problem.
Inspired by the MV model, we can use this model to consider both the profit and risk brought by a dispatch solution under the uncertain wind power environment, and determine the optimal dispatch solution by analyzing the trade-off relationship between the profit and risk. However, how to introduce the concept of profit and risk into the ORPD problem? The profit means that a dispatch solution in the uncertain wind power environment brought about a less averaged transmission loss; in other words, we should minimize the profit as small as possible. On the other hand, the risk means that a robust dispatch solution should be obtained, which can adjust to different uncertain wind power samples. Therefore, the MV model applied in ORPD can be expressed as
where E(·) is the expectation operator, computing the average value of the profit function; M is the number of wind farms integrated to a power system, and \( (W_{1} ,W_{2} , \ldots ,W_{\text{M}} ) \)represent power outputs of these wind farms; NS is the number of wind power samples corresponding to each W j (j = 1,2,···,M) obtained by the LHS-CD method [24]; F i is the transmission loss when the ith wind power sample of all wind farms has integrated to the power system; and P(F i ) describes the probability of the transmission loss F i ·
Then, the variance function is formulated as
where Var(·) is the variance operator.
Once a dispatch solution is determined, then the mean and variance of the profit function can be calculated. Moreover, if the value of variance is high, the transmission loss corresponding to different wind power samples deviates far from the expected value, which means the dispatch solution cannot well adjust the uncertain wind power environment. For example, the transmission loss as for some wind power samples maybe much more than its mean value. Therefore, it is quite necessary for power system dispatchers to take both profit and risk into consideration. Refs. [26, 27] optimize these two indexes by adopting the risk tolerance parameter, in the perspective of the single-objective optimization problem. However, the risk tolerance parameter is difficult to set. Therefore, Ref. [26] uses different risk tolerance parameters to obtain the expected profit and the profit standard deviation, and Ref. [27] analyses the relationship of the risk tolerance parameter and the expected profit, computing different expected profits regarding to different risk tolerance parameters. In this paper, we also use the risk tolerance parameter, λ, to study the MV model. Then the objective function becomes
where W consists of P W and Q W , which stand for the vector of wind farms’ uncertain active and reactive power outputs. It is noted that W mainly affects ORPD on power flow equations, which will be presented in the next subsection.
2.3 Wind power
The Weibull distribution is often used to describe the uncertainty of wind speeds within a long period of time, [29–31]. The ORPD is usually conducted within a short term; therefore, it is not suitable to use the Weibull distribution when solving ORPD with wind power integrated [19]. The actual wind speed can be regarded as the sum of the forecast speed and its error, and the wind speed forecast error follows the Gaussian distribution [19]. Moreover, the Gaussian distribution has been used to depict the wind speed forecast error to solve DP problems [19, 20]. Therefore, in this paper, we adopt the Gaussian distribution:
where Δv represents the wind speed forecast error, N(0, σ 2 v ) stands for the Gaussian distribution with the mean value 0 and the standard deviation σ v .
Then the actual wind speed is expressed as:
where v f indicates the forecast value of the wind speed.
The active power generated by the wind turbine, P wt , is determined by the wind speed [32], which is formulated as:
where v, v ci , v ra , v co are the wind speed, the cut-in wind speed, the rated wind speed, the cut-out wind speed, respectively, and P ra is the rated active power of the wind turbine.
If a wind farm consists of N wt wind turbines, evidently, the total amount of active wind power is P wt × N wt . However, the reactive power generated by wind farms is determined by the control strategy of the farm (turbine) [32]. In this paper, we choose the doubly-fed induction wind power generator with a constant power factor, so the wind farm is a PQ bus [32]. Then the active and reactive power of the wind farm can be expressed as
The wind power mainly affects the dispatch solution of ORPD by power flow equations at the power system bus (e.g., bus i) connected to a wind farm, as shown in the equation constraints:
3 Group search optimizer with intraspecific competition and lévy walk
3.1 Group search optimizer
GSO is a swarm-based optimization algorithm, consisting of three kinds of members, i.e., the producer, scroungers and rangers. In each generation, the member with the best fitness value is chosen as the producer, and a number of members except the producer are randomly selected as scroungers, then the rest of members are rangers. The producer is always located in the most promising area and adopts animal scanning to seek the optimal resource. Scroungers perform area copying to join the resource found by the producer, and perform local searching around it. Meanwhile, rangers employ ranging behavior by random walk (RW) in the searching space to increase the GSO’s chance to escape from local optima. Therefore, GSO performs much better on multi-modal optimization problems than other EAs, such as GA, PSO, EP [7].
In GSO, each member has its current position X k i ∊ Rn and a scanning angle \( \varphi_{i}^{k} = \left( {\varphi_{i1}^{k} ,\varphi_{i2}^{k} , \cdots ,\varphi_{i(n - 1)}^{k} } \right) \in {\mathbb{R}}^{n - 1} \) in the kth bout, and the corresponding unit vector \( D_{i}^{k} (\varphi_{i}^{k} ) = \left( {d_{i1}^{k} ,d_{i2}^{k} , \cdots ,d_{in}^{k} } \right) \in {\mathbb{R}}^{n} \)can be calculated [7]. The searching mathematical models regarding to producer, scroungers and rangers can be shown as follows, respectively.
3.1.1 Producer
The member with the best fitness value is chosen as the producer, whose position is X k p . Afterwards, it will scan randomly by sampling three points: one is at zero degree, the other two points are at the right and left degrees, respectively. As a result, the producer’s searching formulations can be expressed as
where φ k p is scanning angle of the producer, \( \theta_{\hbox{max} } \in {\mathbb{R}}^{n - 1} \)and \( l_{\hbox{max} } \in {\mathbb{R}}^{1} \) are maximum pursuit angle and distance. \( r_{1} \in {\mathbb{R}}^{1} \)is a normally distributed random number with mean 0 and standard deviation 1 and \( r_{2} \in {\mathbb{R}}^{n - 1} \) is a uniformly distributed random sequence in the range of (0,1).
If the producer finds a better position, it will fly to there. Otherwise, it will stay in the same position and take a new random scanning angle
where \( \alpha_{\hbox{max} } \in {\mathbb{R}}^{1} \) is the maximum turning angle.
Moreover, if the producer cannot find a better position after a constant number of iterations, its scanning angle will go back to zero degree
where \( a \in {\mathbb{R}}^{1} \) is a constant.
3.1.2 Scroungers and rangers
Except the producer, a number of group members are randomly selected as scroungers. Scroungers employ the producer-scrounger (PS) model [7] to perform area copying to join the resource found by the producer; in other words, each scrounger keeps moving towards and searches the area around the producer. At the kth iteration, the area copying behavior of the ith scrounger can be modeled by:
where \( r_{3} \in {\mathbb{R}}^{n} \) is a normally distributed random number with mean 0 and standard deviation 1 and “∘” is the Hadamard product.
Aside from the producer and scroungers, the rest of GSO members are rangers. They perform RW in the searching space to resort to other resources, which increases the GSO’s chance to escape from local optima. At the kth iteration, each ranger generates a random head angle φ i k and a random distance lmax, then it moves to a new position:
It should be noted that the members’ roles can be switched between one another in GSO group. For instance, if a better resource is found by a scrounger or a ranger in the next bout compared with the current producer, the scrounger or the ranger will be switched to be the producer; on the other hand, the producer in the previous searching bout will perform scrounging strategies as a scrounger or RW as a ranger.
3.2 Group search optimizer with intraspecific competition and lévy walk
3.2.1 Intraspecific competition
Intraspecific competition (IC) is a particular form of competition in which members of the same species struggle for the same resource in an ecosystem [9]. IC is divided into two components, contest competition and scramble competition [9]. In the former competition, each successful competitor obtains all resources it needs for survival while the rest of competitors are deprived of such resources. However, in terms of scramble competition, it happens when competitors are crowded around limited resources, which are not monopolized by successful competitors. This sort of IC stimulates animals to compete for resources seriously [33].
As for GSO, group members are always hunting for the optimal resource which is definitely scarce. Therefore, IC exists inevitably in the form of scramble competition in GSO’s searching process and it happens if GSO members are crowded around the producer. In [34], an index is proposed that can well describe the population’s crowdedness in some evolutionary algorithms (EAs) dominated by the leading member with the best fitness value, e.g., PSO and GSO. The detailed calculation steps are expressed as follows.
1) Compute the mean distance d i of each particle i with its position x i to all the other particles
where N is the population size and D is the number of particles’ dimensions.
2) Denote d i of the leading particle as d g , determine the maximum distance dmax and minimum distance dmin by comparing all d i in (9). Therefore, f can be determined as
It can be easily seen that the leading member is surrounded closely by other members if f is small [34]. Therefore, the index f can be used to describe the population’s crowdedness. If f is small, it means that GSO members are crowded around the producer. Then IC happens, and \( r_{3} = (r_{{3_{1} }} ,r_{{3_{2} }} , \ldots ,r_{{3_{D} }} ) \), presented in (21), is suggested to be a random vector with higher value ranged in (0.8,1) for scroungers to manifest this serious competition. Here r3 is called scrounging coefficient. In GSOICLW, we suggest if f is less than 0.2, IC happens, then the value of r3 can be determined by the index f as follows.
3.2.2 Diversifying effect of intraspecific competition
As mentioned above, IC occurs when animals from one species in crowdedness directly compete for a limited resource. Moreover, Richard has proposed that IC will drive the diversifying effect within a population, i.e., the increasing population density leads to reduced prey availability, in this way, some individuals will resort to alternative prey types [35]. Furthermore, he has pointed out that more intense competition caused by increasing population density compel more members to choose to seek another food resource [35]. Similar phenomena caused by IC have also been observed by other biologists [36, 37].
Therefore, when the group members in GSO are in IC, the diversifying effect will happen, i.e., some members are going to seek another food, acting as the role of rangers to escape this serious competition. In addition, it is noted that the IC become more intense, the more rangers will emerge [35]. In the above subsection, we have introduced the index f describing the crowdedness of population in GSO group, and it can be easily seen that when f becomes smaller, it means GSO members are more crowded, then IC become more intense, leading more individuals to become rangers.
According to the basic GSO algorithm, the ratio of rangers is set as a constant (20%) during the whole searching process. But in practical process of seeking food resources, as mentioned above, the proportion of rangers should vary in accord with the intensity. More specifically, the smaller index f, the more intense of IC; thus the bigger ratio of rangers. Therefore, we propose the ratio of rangers c f in the proposed algorithm is the function of the index f when the searching group is in IC, otherwise a constant ratio, i.e., 20%, as employed in GSO. Therefore, the formulation of cf is expressed as follows.
3.3 Lévy walk
In GSO, ranging animals perform searching strategies by means of RW, which are thought to be one of the most efficient searching method for randomly distributed resources [7]. It can be seen that rangers choose random searching distance in (18), where r1 is a normally distributed random number with mean 0 and standard deviation 1. As a result, it can be seen rangers in GSO are performing the classical random walk because its variance of step length distribution is finite [38].
However, Viswanathan has claimed that LW is more efficient than classical random walk, because LW owns an inverse square power-law distribution of fight lengths. He has proved his claim by analyzing experimental foraging data on selected insect, mammal and bird species, and found that they were consistent with the predicted inverse square power-law distributions [10]. What is more, Andrew has conducted experiments on honey bees, and proved that the LW constitutes an optimal searching strategy for food resources [39].
Therefore, the LW is chosen as the strategy of ranging behavior in GSOICLW, and its walking length, r, can be drawn from a probability distribution function with a power-law tail as follows [10]
It is noteworthy to mention that when μ ≤ 1, the distribution function cannot correspond to probability distributions that can be normalized; on the other hand, the function will become Gaussian distribution function if μ ≥ 3. Therefore, here we choose μ = 2.
In this way, (14) should be changed by replacing the normal random number r1 with the random number r from lévy distribution function. Then the ith member acting as a ranger moves to a new position
In conclusion, GSOICLW incorporates IC and LW into GSO, as illustrated in Fig. 1. In GSO, most members, acting as scroungers, who scrounges the producer, and rangers perform RW to seek other resources. However, when other members are crowding around the producer, IC happens. It leads to more intense scrabble for the resource lying in the position of the producer and more rangers who will disperse with longer step by LW in the searching space. In [8], it has been proved that IC makes the scrounging coefficient and rangers’ ratio vary adaptively to balance local and global searching, and LW stimulates rangers to perform more efficient global searching than RW. In other words, GSO achieves better performance than GSO in that it improves GSO’s local searching ability while maintaining its global searching performance.

Illustration of IC and LW in GSOICLW
4 Latin hypercube sampling with Cholesky decomposition
To deal with the uncertainty of wind speed or wind power, the MC simulation combined with simple random sampling (SRS) has been widely used in power system dispatch problems [11, 15]. However, the SRS sampling method is inefficient for its heavy computational burden due to the need of a large number of repeated calculations to obtain a specified accuracy. It has been proved in Ref. [24] that the sampling method of Latin hypercube sampling with Cholesky decomposition (LHS-CD) can obtain more reliable results with relatively small sample size, compared with SRS. Therefore, in this paper, LHS-CD is used to sample wind speed forecast errors, which folllow the Gaussian distribution.
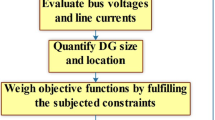
Then the wind speed samples can be obtained to calculate the corresponding power flows to compute the mean and variance of the profit function mentioned above. The detailed LHS-CD calculation steps for power flow can be found in [24], and the calculation flowchart is shown in Fig. 2.

Calculation flowchart of LHS-CD for power flow
5 Experimental studies
The MV model and the algorithm of GSOICLW have been tested on the IEEE 30-bus test system. This test system consists of 48 branches, 4 transformers, 6 generator-buses, and 22 load-buses. The total system demand is 283.4 MW. The locations for the wind farms are on buses 7, 10, 16, 24 and 30, and predicted wind speeds and number of wind turbines operated in the wind farms are given in Table 1. The standard deviation of the wind speed forecast error is set to be 8% of its corresponding forecast wind speed.
Suppose the doubly-fed induction generator (DFIG) with a constant power factor is used in wind farms. The rated active power is set to be 2 MW, and the rated, cut-in and cut-out wind speed are set to be 12.5 m/s, 4 m/s and 20 m/s, respectively. As for the sampling method of LHS-CD, we set the number of wind speed samples to be 400.
Moreover, in order to demonstrate the effectiveness of GSOICLW, it is tested and compared with GSO, PSO and the algorithm of primal-dual interior point (PDIP) based on the modified IEEE 30-bus test system, considering the predicted wind speeds. In addition, 50 independent runs have been used for GSOICLW, GSO, PSO and PDIP to test their average performances on the ORPD problem. The population sizes of GSOICLW and GSO are set as 47, and the total iterations during each run are both 300, respectively. Therefore, the total number of fitness evaluation is 15,000. The parameters of IC and LW in GSOICLW are listed in Sect. 3. Moreover, we also set the total number of fitness evaluation in terms of PSO and PDIP are the same as that of GSOICLW. Please note that PDIP is sensitive to the initial searching point, which is difficult to select, and we randomly choose it when conducting the 50 independent runs.
In order to further assess the performance of the proposed algorithm in a stochastic search process, the Mann-Whitney U-test is adopted. It is a non-parametric test for comparing two populations, assessing whether the two groups of results are statistically different from each other [40].
Therefore, we conduct two simulation cases: one aims to test the performance of GSOICLW and the other is designed to prove the effectiveness of the MV model.
Case 1: Minimization of the transmission loss with predicted wind speeds.
Case 2: Minimization of the transmission loss with uncertain wind speeds.
5.1 Minimization of the transmission loss with predicted wind speeds
In this case, it aims to minimize transmission loss only based on IEEE 30-bus system, which focuses on optimizing the objective function J1 in (2). The best results, worst results, average results and standard deviations of transmission loss gained by GSOICLW, GSO and PSO from 50 runs are presented in Table 2. It is shown that GSOICLW can find more accurate and robust solution than GSO and PSO because the average result and standard deviation obtained by GSO are 1.3404 and 0.0081, much better than that of GSO, PSO and PDIP. In particular, the average transmission loss obtained by GSOICLW is superior to the best results gained by GSO, PSO and PDIP, which are 1.3590 MW/h, 1.3592 MW/h and 1.3602 MW/h, respectively. As for PSO and PDIP, the worst results (1.7134 MW/h and 3.0459 MW/h) and standard deviations (0.0581 and 0.5963) of transmission loss, much worse than that of GSOICLW, indicate PSO and PDIP easily entrap in local optima during the searching process. Moreover, the gained p-values and h-values using the Mann-Whitney U-test are shown in Table 2, which prove that the results obtained by GSOICLW are significantly different from that of GSO, PSO and PDIP.
Fig. 3 shows the convergence results in 50 trials in this case for GSO and GSOICLW, respectively. It can be easily seen that GSOICLW can find better solution than GSO. Although GSO can find good results in some trials (i.e., the 16th trial), but in the rest trials the optimized costs are even close to 1.40 MW/h. Consequently, the standard deviation corresponding to GSO is 0.0121, lager than that of GSOICLW.

Convergence results of Case 1 obtained by GSOICLW and GSO in 50 runs
5.2 Minimization of the transmission loss with uncertain wind speeds
The MV model shown in (7) is solved for different values of the risk tolerance parameter, which allows assigning different weights to the fuel cost term \( F^{ \exp } \) (representing the profit term) versus the risk term V in the objective function. It can be easily seen that the risk tolerance parameter will put a great impact on the final optimized results. The smaller risk tolerance parameter is, the more emphasis on the profit. Suppose, λ varies from 0.0 to 0.5, and this range is considered wide enough to reflect the variety of risk that power system dispatchers are willing to assume.
Table 3 illustrates dispatching differences for the cases of the maximum risk (λ = 0) and a low level of risk (λ = 0.5). Moreover, Fig. 4 depicts transmission loss’ expected value and standard deviation versus the risk tolerance parameter. It can be observed that the expected transmission loss increases as variance decreases. The expected transmission loss achieved by a conservative dispatch solution (λ = 0.5) is 2.2045 MW/h whereas the expected fuel cost with the maximum risk is equal to 1.4431 MW/h (λ = 0), corresponding to the aggressive dispatch solution.

Mean and variance values with different risk tolerance parameters
It can be easily seen that different levels of risk imply different dispatching solutions, and ultimately, different transmission loss under the uncertain wind power environment. It is noted that different risk tolerance parameters correspond to different dispatch solutions. To demonstrate the different effectiveness in terms of the dispatch solutions obtained in Table 3, Fig. 5 shows transmission loss corresponding to different wind speed samples among the LHS-CD simulation, in terms of the dispatch solutions A (λ = 0.5), B (λ = 0.2) and C (λ = 0).

Transmission loss corresponding to 400 wind speed samples in terms of different dispatch solutions
It is clear that if solution C is adopted by power system dispatchers, the expected transmission loss among the 400 wind samples is 1.4431 MW/h, much lower than that of B and C. However, the deviation regarding to solution C is much higher, which demonstrates that this solution cannot adjust all the wind samples well. For instance, the transmission loss regarding to many wind samples are even more than that of the solution B, and the transmission loss corresponding to the 323th and 361th wind power samples are even more than that of the solution A, although the expected transmission loss of solution C is smaller than B and much smaller than A.
On the other hand, although the deviation of solution A is much smaller, which proves it can adjust all the uncertain wind samples well, the average transmission loss is too high, which is 2.2045 MW/h. It may not be advisable for power system dispatchers to choose this solution for the consideration of economic aspects. In essence, the final dispatch solution is determined mainly by the dispatchers’ attitudes toward the trade-off between profit and risk. How to make decision based on dispatchers’ attitudes is one of our further research directions.
6 Conclusion
This paper presents the mean-variance (MV) model to solve power system reactive power dispatch (RPD) problems with wind power integrated. The MV model considers the profit and risk simultaneously under the uncertain wind power (speed) environment. To describe this uncertain environment, the Latin hypercube sampling with Cholesky decomposition (LHS-CD) simulation method is used to sample uncertain wind speeds. An improved optimization algorithm, group search optimizer with intraspecific competition and lévy walk (GSOICLW), is then used to optimize the MV model by introducing the risk tolerance parameter. To test the performance of GSOICLW and the effectiveness of the MV model, simulation studies have been carried out on the IEEE-30 bus system in two cases: one is minimization of the transmission loss with predicted wind speeds, and the other intends to minimize the transmission loss with uncertain wind speeds. In the first case, the obtained results have proved that GSOICLW can obtain more accurate and robust optimal solution, in comparison with GSO and PSO. In the second case, simulation results have proved that the expected transmission loss and the corresponding standard deviation vary in different direction with the change of different risk tolerance parameters, which demonstrates the effectiveness and validity of the proposed model.
References
Wu QH, Ma JT (1995) Power system optimal reactive dispatch using evolutionary programming. IEEE Trans Power Syst 10(3):1243–1249
Dai CH, Chen WR, Zhu YF et al (2009) Seeker optimization algorithm for optimal reactive power dispatch. IEEE Trans Power Syst 24(3):1218–1231
Deeb N, Shahedipour SM (1990) Linear reactive power optimization in a large power network using the Decomposition approach. IEEE Trans Power Syst 5(2):428–435
Granville S (1994) Optimal reactive dispatch through interior point methods. IEEE Trans Power Syst 9(1):136–146
Momeh JA, Guo SX, Oghuobiri EC et al (1994) The quadratic interior point method solving power system optimization problems. IEEE Trans Power Syst 9(3):1327–1336
Wu QH, Cao YJ, Wen JY (1998) Optimal reactive power dispatch using an adaptive genetic algorithm. Int J Electr Power Energy Syst 20(8):563–569
He S, Wu QH, Saunders JR (2009) Group search optimizer: an optimization algorithm inspired by animal searching behavior. IEEE Trans Evol Comput 13(5):973–990
Li YZ, Li MS, Ji Z et al (2013) Optimal power flow using group search optimizer with intraspecific competition and lévy walk. In: Proceedings of the IEEE symposium on swarm intelligence(SIS’13), Singapore, 16–19 Apr 2013, 256–262 pp
Nicholson AJ (1954) An outline of the dynamics of animal populations. Aust J Zool 2(1):9–65
Viswanathan GM (1999) Optimizing the success of random searches. Nature 401:911–914
Shi LB, Wang C, Yao LZ et al (2012) Optimal power flow solution incorporating wind power. IEEE Syst J 6(2):233–241
Zhou W, Peng Y, Sun H (2011) Optimal wind-thermal coordination dispatch based on risk reserve constraints. Eur Trans Electr Power 21(1):740–756
Hong YY, Chang HL, Chiu CS (2010) Hour-ahead wind power and speed forecasting using simultaneous perturbation stochastic approximation (SPSA) algorithm and neural network with fuzzy inputs. Energy 35(9):3870–3876
De Giorgi MG, Ficarella A, Tarantino M (2011) Assessment of the benefits of numerical weather predictions in wind power forecasting based on statistical methods. Energy 36(7):3968–3978
Ummels BC, Gibescu M, Pelgrum E et al (2007) Impacts of wind power on thermal generation unit commitment and dispatch. IEEE Trans Energy Convers 22(1):44–51
Wang JH, Shahidehpour M, Li ZY (2010) Security-constrained unit commitment with volatile wind power generation. IEEE Trans Power Syst 23(3):1319–1327
Miranda V, Hang PS (2005) Economic dispatch model with fuzzy wind constraints and attitudes of dispatchers. IEEE Trans Power Syst 20(4):2143–2145
Wang LF, Singh C (2008) Balancing risk and cost in fuzzy economic dispatch including wind power penetration based on particle swarm optimization. Electr Power Syst Res 78(8):1361–1368
Lee TY (2007) Optimal spinning reserve for a wind-thermal power system using EIPSO. IEEE Trans Power Syst 22(4):1612–1621
Piperaqkas GS, Anastasiadis AG, Hatziarqyriou ND (2011) Stochastic PSO-based heat and power dispatch under environmental constraints in corporating chp and wind power units. Electr Power Syst Res 81(1):209–218
Boufard F, Galiana FD (2008) Stochastic security for operations planning with significant wind power generation. IEEE Trans Power Syst 23(2):306–316
Sun YZ, Wu J, Li GJ et al (2009) Dynamic economic dispatch considering wind power penetration based on wind speed forecasting and stochastic programming. Proc CSEE 29(4):41–47 (in Chinese)
Siahkali H, Vakilian M (2010) Stochastic unit commitment of wind farms integrated in power system. Electr Power Syst Res 80(9):1006–1017
Yu H, Chung CY, Wong KP et al (2009) Probabilistic load flow evaluation with hybrid latin hypercube sampling and cholesky decomposition. IEEE Trans Power Syst 24(2):661–667
Markowitz HM (1952) Portfolio selection. J Finance 7(1):77–91
Conejo AJ, Nogales FJ, Arroyo JM et al (2004) Risk-constrained self-scheduling of a thermal power producer. IEEE Trans Power Syst 19(3):1569–1574
Yamin HY, Shahidehpour SM (2004) Risk and profit in self-scheduling for gencos. IEEE Trans Power Syst 19(4):2104–2106
Li MS, Ji TY, Wu QH et al(2010) Stochastic optimal power flow using a paired-bacteria optimizer. In: Proceedings of the IEEE Power Energy Society general meeting, Minneapolis, 25–29 July 2010, 7 pp
Justus CG, Hargraves WR, Mikhail A et al (1978) Methods for estimating wind speed frequency distributions. J Appl Meteorol 17(3):350–353
Conradsen K, Nielsen LB, Prahm LP (1984) Review of Weibull statistics for estimation of wind speed distributions. J Climate Appl Meteorol 23(8):1173–1183
Tuller SE, Brett AC (1984) The characteristics of wind velocity that favor the fitting of a weibull distribution in wind speed analysis. J Climate Appl Meteorol 23(1):124–134
Zhao M, Chen Z, Blaabjerg F (2006) Probabilistic capacity of a grid connected wind farm based on optimization method. Renew Energy 31(13):2171–2187
Berryman AA (1999) Principles of population dynamics and their application. Garland Science, New York
Zhan ZH, Zhang J, Li Y et al (2009) Adaptive particle swarm optimization. IEEE Trans Syst Man Cybern B 39(6):1362–1381
Svanbäck R, Bolnick DI (2007) Intraspecific competition drives increased resource use diversity within a natural Population. Proc Roy Soc B 274(1611):839–844
Bolnick DI (2001) Intraspecific competition favours niche width expansion in drosophila melanogaster. Nature 410:463–466
Craig MacLean R (2005) Adaptive radiation in microbial microcosms. J Evol Biol 18(6):1376–1386
Benhamou S (2007) How many animals really do the levy walk? Ecology 88(8):1962–1969
Reynolds AM, Smith AD, Reynolds DR et al (2007) Honeybees perform optimal scale-free searching ights when attempting to locate a food source. J Exp Biol 210(21):3763–3770
Hollander M, Wolfe DA (1973) Nonparametric statistical methods. Wiley, New York
Acknowledgments
The work is funded by Guangdong Innovative Research Team Program (No. 201001N0104744201) and National Key Basic Research and Development Program (973 Program, No. 2012CB215100), China. The first author thanks for the financial support from China Scholarship Council Program (No. 201306150070).
Author information
Authors and Affiliations
Corresponding author
Additional information
Crosscheck date: 10 October 2014
Rights and permissions
This article is published under license to BioMed Central Ltd. Open Access This article is distributed under the terms of the Creative Commons Attribution License which permits any use, distribution, and reproduction in any medium, provided the original author(s) and the source are credited.
About this article

Cite this article
LI, Y., LI, M. & WU, Q. Optimal reactive power dispatch with wind power integrated using group search optimizer with intraspecific competition and lévy walk. J. Mod. Power Syst. Clean Energy 2, 308–318 (2014). https://doi.org/10.1007/s40565-014-0076-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40565-014-0076-9