
Abstract
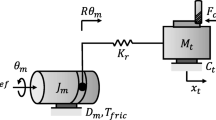
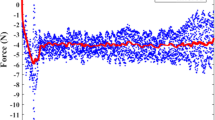
In this paper, a linear active disturbance rejection control strategy (LADRC) aiming at the nonlinearity and load disturbance problems in electrohydraulic proportional servo system was proposed. The mathematical model of the electrohydraulic proportional servo system was established, and the LADRC controller that composed of LTD, LESO and LSEF was designed. The simulation analysis results revealed the LADRC controller has high anti-disturbance ability and tracking accuracy in different working conditions, such as no external disturbance, sudden external disturbance and multiple external disturbance, and the control performance was better than the traditional PID controller. When tracking the step signal with white noise and pulse width disturbance, the estimation accuracy of the LESO observer was slightly reduced, but it could still meet the requirements of the field operation tracking accuracy of the shearer automatic heightening system. Under the condition of system internal parameter perturbation, when the perturbation of physical parameters was less than 30%, LADRC showed strong robustness. LADRC in this study can effectively suppress the multi-source random uncertainty disturbance in the operation process of the roller height adjustment system, while realizing accurate track tracking of the destination cutting path.










Similar content being viewed by others

Data availability
The models of LADRC used to support the findings of this study are available from the corresponding author upon request. Meanwhile, all data used during the study appear in the submitted article.
References
Liu X, Guo P, Nie L (2020) Applying emergy and decoupling analysis to assess the sustainability of China’s coal mining area. J Clean Prod 243:118577
Wang H, Zhang Q (2019) Dynamic identification of coal-rock interface based on adaptive weight optimization and multi-sensor information fusion. Inf Fusion 51:114–128
Chen W, Nan P, Yan X et al (2020) Prediction and model optimization of memory cutting trajectory based on deep learning. J China Coal Soc 45(12):4209–4215
Acuña-Bravo W, Canuto E, Agostani M et al (2017) Proportional electro-hydraulic valves: an embedded model control solution. Control Eng Pract 62:22–35
Yuan H-B, Na H-C, Kim Y-B (2018) Robust MPC–PIC force control for an electro-hydraulic servo system with pure compressive elastic load. Control Eng Pract 79:170–184
Yin X, Zhang W, Jiang Z et al (2019) Adaptive robust integral sliding mode pitch angle control of an electro-hydraulic servo pitch system for wind turbine. Mech Syst Signal Process 133:105704
Guo Q, Shi G, Wang D et al (2018) Iterative learning based output feedback control for electro-hydraulic loading system of a gait simulator. Mechatronics 54:110–120
Jin X, Chen K, Zhao Y et al (2020) Simulation of hydraulic transplanting robot control system based on fuzzy PID controller. Measurement 164:108023
Jing C, Xu H, Jiang J (2019) Dynamic surface disturbance rejection control for electro-hydraulic load simulator. Mech Syst Signal Process 134:106293
Fallahi M, Zareinejad M, Baghestan K et al (2018) Precise position control of an electro-hydraulic servo system via robust linear approximation. ISA Trans 80:503–512
Gao Z (2003) Scaling and bandwidth-parameterization based controller tuning. In: ACC, pp 4989–4996
Han J (2009) From PID to active disturbance rejection control. IEEE Trans Ind Electron 56(3):900–906
Qian Q, Dan Z, Zhang S et al (2019) Linear active disturbance rejection control method for intake pressure control in aero-engine transient test. J Aerosp Power 34(10):2271–2279
Yang L, Zeng J, Ma W et al (2019) Voltage control of microgrid inverter based on improved second-order linear active disturbance rejection control. Autom Electric Power Syst 43(4):146–153
Zhang Y, Chen Z, Zhang X et al (2019) Attitude control of tandem rotor UAV based on cascade linear active disturbance rejection control. J Cent South Univ (Sci Technol) 50(3):564–571
Su X-P, Li W, Fan Q-G (2012) A shearer drum height adjusting strategy using sliding mode variable structure control. J China Coal Soc 37(12):2107–2111
Wang H, Song Y (2018) Influences of drum cutting load disturbances on shearer height adjustments. China Mech Eng 29(02):127
Chunqiang L, Guangzhao L, Zhe C et al (2019) A linear ADRC-based robust high-dynamic double-loop servo system for aircraft electro-mechanical actuators. Chin J Aeronaut 32(9):2174–2187
Jin K, Song J, Li Y et al (2019) Linear active disturbance rejection control for the side roller displacement of four-roller plate bending machine. J Mech Eng 55(24):72–82
Guo B, Bacha S, Alamir M et al (2019) LADRC applied to variable speed micro-hydro plants: experimental validation. Control Eng Pract 85:290–298
Liu W, Bian Z, Liu Z et al (2015) Evaluation of a cubature Kalman filtering-based phase unwrapping method for differential interferograms with high noise in coal mining areas. Sensors 15(7):16336–16357
Zhen T, Shuangxi J, Lijuan Z et al (2019) Research on noise and vibration characteristics of shearer. J Mine Autom 45(03):23–28
Acknowledgements
This research was financially supported by the National Natural Science Foundation of China (Grant no: 51475001) and Research and practice innovation program for Postgraduates in Jiangsu Province (Grant no: SJCX19_1032).
Funding
This study was funded by the National Natural Science Foundation of China, grant number: 51475001, and Research and Practice Innovation Program for Postgraduates in Jiangsu Province: grant number: SJCX19_1032.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
Haojie Gao states that there is no conflict of interest.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Gao, H., Wang, R., Xiong, X. et al. Optimization research of electrohydraulic proportional servo adjustment system for shearer drum based on linear active disturbance rejection control. Int. J. Dynam. Control 12, 1502–1511 (2024). https://doi.org/10.1007/s40435-023-01266-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40435-023-01266-7