
Abstract
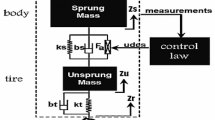
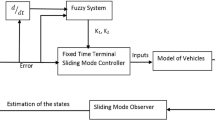
This study presents a novel method to design an observer for nonlinear systems based on fuzzy sliding mode control. In general, there is no standard method for the observer design in nonlinear systems. The proposed observer can be used for a wide range of control systems and its estimates are desirable. In this work, an observer was designed for a nonlinear system as well as a nonlinear quarter vehicle suspension system, the equations of which were derived using Lagrange method, to determine the performance and efficiency. The sliding mode control was used for the nonlinear equations in question. Sliding mode control has long been applied to control systems with modeling uncertainty. This controller is of robust type; however, it has some problems. Fuzzy control is a popular method that can be combined with sliding mode control to solve some of its problems and improve the efficiency of the controller-observer system.


















Similar content being viewed by others

References
Li HX, Gatland HB, Green AW (1997) Fuzzy variable structure control. IEEE Trans Syst Man Cybern 27(2):306–312
Chwee K, Li Y (1994) Design of sophisticated fuzzy logic controllers using genetic algorithms. In: Proceedings of 1994 IEEE 3rd international fuzzy systems conference
Piltan F, Nabaee A, Ebrahimi M, Bazregar M (2013) Design robust fuzzy sliding mode control technique for robot manipulator systems with modeling uncertainties. J Inf Technol Comput Sci 5(8):123–135
Wen S, Chen MZQ, Zeng Z, Yu X (2016) Fuzzy control for uncertain vehicle active suspension systems via dynamic sliding-mode approach. IEEE Trans Syst Man Cybern Syst 47(1):24–32
Taran B, Pirmohammadi A (2019) Designing an optimal fuzzy sliding mode control for a two-link robot. J Braz Soc Mech Sci Eng 42(1):1–12
Dorostian M, Moradmand A (2021) Hierarchical robust model-based predictive control in supply chain management under demand uncertainty and time-delay.In: 2021 7th international conference on control, instrumentation and automation (ICCIA), pp 1–6
Moradmand A, Dorostian M, Shafai B (2020) Energy scheduling for residential distributed energy resources with uncertainties using model-based predictive control. arXiv preprint arXiv:2007.11182
Moradmand, PA, Khaloozadeh H (2017) An experimental study of modeling and self-tuning regulator design for an electro-hydro servo-system. In 2017 5th International Conference on Control, Instrumentation, and Automation (ICCIA), pp 126–131
Habibnejad-Korayem M, Ghobadi N, Fathollahi-Dehkordi S (2021) Designing an optimal control strategy for a mobile manipulator and its application by considering the effect of uncertainties and wheel slipping. Optim Control Appl Methods 42(5):1487–1511
Ghadiri H, Mohammadi A, Khodadadi H (2022) Fast terminal sliding mode control based on SDRE observer for two-axis gimbal with external disturbances. J Braz Soc Mech Sci Eng 44(2):1–23
Wang X, Tan C-P, Zhou D (2017) A novel sliding mode observer for state and fault estimation in systems not satisfying matching and minimum phase conditions. Automatica 79:290–295
Gholami H, Binazadeh T (2018) Sliding-mode observer design and finite-time control of one-sided Lipschitz nonlinear systems with time-delay. Soft Comput 23(15):6429–6440
Nguyen V-C, Vo A-N, Kang H-J (2020) A non-singular fast terminal sliding mode control based on third-order sliding mode observer for a class of second-order uncertain nonlinear systems and its application to robot manipulators. IEEE Access 8:78109–78120
Hong K-S et al (1999) A new model and an optimal pole-placement control of the Macpherson suspension system. SAE Trans pp 2452–2461
Wang Z, Dong M, Qin Y, Du Y, Zhao F, Gu L (2016) Suspension system state estimation using adaptive Kalman Filtering Based on road classification. Veh Syst Dyn 55(3):371–398
He J-H (2019) The simpler, the better: analytical methods for nonlinear oscillators and fractional oscillators. J Low Freq Noise Vib Active Control 38(3–4):1252–1260
Liu H-Y, Li Z-M, Yao S-W, Yao Y-J, Liu J (2020) A variational principle for the photocatalytic NOx abatement. Therm Sci 24(4):2515–2518
Yao S-W (2021) Variational principle for nonlinear fractional wave equation in a fractal space. Therm Sci pp 18–18
He J-H, Amer T-S, Elnaggar S, Galal A-A (2021) Periodic property and instability of a rotating pendulum system. Axioms 10(3):191
He C-H, Tian D, Moatimid G-M, Salman H-F, Zekry M-H (2021) Hybrid rayleigh–van der pol–duffing oscillator: stability analysis and controller. J Low Freq Noise Vib Active Control
Tian D, Ain Q-T, Anjum N, He C-H, Cheng A-B (2021) Fractal N/MEMS: from pull-in instability to pull-in stability. Fractals 29(2):2150030
Slotine JJE, Li W (1991) Applied nonlinear control, vol 199, no 1, Prentice Hall, Englewood Cliffs
Sulaiman M, Patakor F-A, Ibrahim Z (2014) New methodology for chattering suppression of sliding mode control for three-phase induction motor drives. WSEAS Trans Syst Control pp 1–9
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Funding
The authors have not received any funding from any organization.
Availability of data and material
All data and material are available.
Code availability
The codes for this article are available.
Authors’ contributions
Babak Taran: Methodology, Software, Writing; Amin Ramezani: Methodology, Resources, review & editing
Rights and permissions
About this article

Cite this article
Taran, B., Ramezani, A. A novel fuzzy sliding mode observer for suspension systems. Int. J. Dynam. Control 10, 1889–1902 (2022). https://doi.org/10.1007/s40435-022-00957-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40435-022-00957-x