
Abstract
PI control based field oriented control (FOC) scheme is the predominant method for the control of permanent magnet synchronous motors (PMSMs) in applications requiring high performance. A novel nonlinear time–frequency control based FOC design for the fast, accurate, and robust control of PMSMs is presented. Featuring a single nonlinear time–frequency controller and a PI controller as the 2 primary components in the control configuration, the new scheme is evaluated against a classic PI control based FOC design for performances in response to rapid speed-switching and abrupt external torque variation. The scheme displays significantly smaller steady-state tracking errors undergoing speed shifting and no high frequency current oscillations or electromagnetic torque ripple in the motor, as does the PI based scheme. The tracking errors corresponding to changes in torque are free of distortion and oscillation that would otherwise indicate instability and inaccuracy. Precision positioning control is also realized through incorporating a P controller into the controller configuration. When the motor reference position is briskly flipped between 360° and 1°, the novel controller design is shown to perform well with a rotor position error that is less than 0.13°.














Similar content being viewed by others

References
Vu NTT, Choi HH, Jung JW (2012) Certainty equivalence adaptive speed controller for permanent magnet synchronous motor. Mechatronics 22(6):811–818
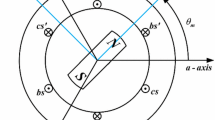
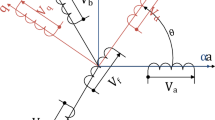
Krause PC, Wasynczuk O, Sudhoff SD (1995) Analysis of electric machinery. Wiley-IEEE Press, Hoboken
Zhou CJ, Quach DC, Xiong NX et al (2015) An improved direct adaptive fuzzy controller of an uncertain PMSM for web-based e-service systems. IEEE Trans Fuzzy Syst 23(1):58–71
Mynar Z, Vesely L, Vaclavek P (2016) PMSM model predictive control with field-weakening implementation. IEEE Trans Ind Electron 63(8):5156–5166
Ananthamoorthy NP, Baskaran K (2015) High performance hybrid fuzzy PID controller for permanent magnet synchronous motor drive with minimum rule base. J Vib Control 21(1):181–194
Alexandrou AD, Adamopoulos NK, Kladas AG (2016) Development of a constant switching frequency deadbeat predictive control technique for field-oriented synchronous permanent-magnet motor drive. IEEE Trans Ind Electron 63(8):5167–5175
Liu MK, Suh CS (2012) Simultaneous time–frequency control of bifurcation and chaos. Commun Nonlinear Sci Numer Simul 17(6):2539–2550
Liu MK, Suh CS (2014) Simultaneous time–frequency control of friction-induced instability. J Appl Nonlinear Dyn 3(3):227–244
Suh CS, Liu MK (2013) Control of cutting vibration and machining instability: a time–frequency approach for precision, micro and nano machining. Wiley, Hoboken
Wang X, Suh CS (2016) Precision concurrent speed and position tracking of brushed dc motors using nonlinear time–frequency control. J Vib Control. https://doi.org/10.1177/1077546316628974
Pillay P, Krishnan R (1988) Modeling of permanent magnet motor drives. IEEE Trans Ind Electron 35(4):537–541
Wang X, Suh CS (2016) Nonlinear time–frequency control of PM synchronous motor instability applicable to electrical vehicle application. Int J Dyn Control 4(4):400–412
Jensen A, Cour-Harbo AL (2001) Ripples in mathematics: the discrete wavelet transformation. Springer, Berlin
Attallah S (2000) The wavelet transform-domain LMS algorithm: a more practical approach. IEEE Trans Circuits Syst II Analog Digit Signal Process 47(3):209–213
Kuo SM, Morgan DR (1996) Active noise control systems: algorithms and DSP implementation. Wiley, Hoboken
Kumar V, Gaur P, Mittal AP (2014) ANN based self-tuned PID like adaptive controller design for high performance PM synchronous motor position control. Expert Syst Appl 41(17):7995–8002
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Rights and permissions
About this article

Cite this article
Wang, X., Steve Suh, C. A nonlinear time–frequency control based FOC for permanent magnet synchronous motors. Int. J. Dynam. Control 9, 179–189 (2021). https://doi.org/10.1007/s40435-020-00662-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40435-020-00662-7