
Abstract
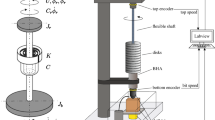
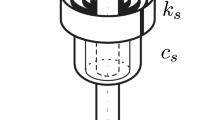
The objective of this study is to present the results of implementing a robust tracking control strategy for a rotating and slender system, subject to dry friction and rubbing. This system corresponds to a physical model defined from the rotary drilling system used in the oil and gas industry. In the simulations, the system to be controlled is modeled using finite element, while for the control design, a lumped parameter model with adjustments is used. The control law is based on the sliding mode technique with a dynamic boundary layer. An important result is that the use of the boundary layer enabled the system to track the desired trajectory with a permanent error within acceptable limits, while also eliminating the high switching frequency at the input, a typical issue of the sliding mode method. Additionally, auxiliary functions are recursively defined to incorporate a smooth friction model into the control law, aiming to treat the friction torque not as a perturbation and to minimize the required actuation force. Another significant outcome is the proposal of a general methodology for representing the internal dynamics of the torsion system. Finally, the physical model served as the basis for the design and construction of a prototype, which is described throughout this study.















Similar content being viewed by others

Data availability
MATLAB source codes and experiments results are made available under the GitHub repository PhD-USP-AD https://github.com/AdrianoDomeny/PhD-USP-AD.
References
Bourgoyne AT, Millheim KK, Chenevert ME, Young FS et al. (1986) Applied Drilling Engineering vol. 2. Society of Petroleum Engineers Richardson
Schlumberger Developers: The Defining Series: Drilling Fluid Basics. Disponível em https://www.slb.com/resource-library/oilfield-review/defining-series/defining-drilling-fluids. Viewed in April 21, 2022 (2022)
Ritto T (2010) Numerical analysis of the nonlinear dynamics of a drill-string with uncertainty modeling. PhD thesis, Citeseer
Kreuzer E, Steidl M (2012) Controlling torsional vibrations of drill strings via decomposition of traveling waves. Arch Appl Mech 82(4):515–531
Navarro-López EM, Licéaga-Castro E (2009) Non-desired transitions and sliding-mode control of a multi-dof mechanical system with stick-slip oscillations. Chaos Solit Fract 41(4):2035–2044
Abdulgalil F, Siguerdidjane H (2005) Pid based on sliding mode control for rotary drilling system. In: EUROCON 2005-The International Conference on “Computer as a Tool”, vol 1, pp 262–265. IEEE
Monteiro HL, Trindade MA (2017) Performance analysis of proportional-integral feedback control for the reduction of stick-slip-induced torsional vibrations in oil well drillstrings. J Sound Vib 398:28–38
Domeny A (2023) Dynamics and control of a slender flexible rotating structure subject to torsion and rubbing (in portuguese), available in https://www.teses.usp.br/, viewed in may 23rd, 2023. PhD thesis, Universidade de São Paulo
Slotine J-JE, Li W et al (1991) Applied nonlinear control, vol 199. Prentice Hall Englewood Cliffs
Santos AD (2015) Dynamics of a slender rotating column subjected to stick-slip action in two distinct regions (in portuguese), available in https://www.maxwell.vrac.puc-rio.br/colecao.php?strSecao=resultado &nrSeq=26272@1, viewed in may 23rd, 2023. Master’s thesis, Pontifícia Universidade Católica do Rio de Janeiro, Rio de Janeiro
Newmark NM (1959) A method of computation for structural dynamics. J Eng Mech Div 85(3):67–94
Acknowledgements
My thanks go to the Graduate Program in Mechanical Engineering at USP, for supporting my technical training, and also to CAPES, for the financial support scholarship.
Funding
No funding was received to assist with the preparation of this manuscript.
Author information
Authors and Affiliations
Contributions
The main author has written the first version of the article, and the second author has done the revision.
Corresponding author
Ethics declarations
Conflict of interest
The authors have no conflict of interest as defined by Springer, or other interests that might be perceived to influence the results and/or discussion reported in this paper.
Ethical approval
Not applicable.
Additional information
Technical Editor: Samuel da Silva.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
dos Santos, A.D., de Toledo Fleury, A. Control of a slender rotary system subjected to dry friction and rub. J Braz. Soc. Mech. Sci. Eng. 46, 320 (2024). https://doi.org/10.1007/s40430-024-04914-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40430-024-04914-x