
Abstract
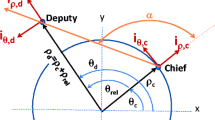
This paper presents nonlinear observability criteria for the relative orbital dynamics represented by the solutions of the two-body problem. It is assumed that a chief is on a circular orbit with a prescribed orbital radius, and it measures lines-of-sight toward a deputy only. A differential geometric method, based on the Lie derivatives, is used to derive sufficient conditions for observability of the orbital properties of the deputy. It is shown that under certain geometric conditions on the relative configuration between the chief and the deputy, the nonlinear relative motion is observable from angles-only measurements. The second part of this paper presents a quantitative measure of observability for the relative orbits, and it is formulated by generalizing the observability Gramian of linear dynamic systems. An extended Kalman filter is also developed to numerically illustrate the observability of nonlinear relative orbits with angles-only measurements and to show correspondence between the proposed observability measure and filtered solution accuracy.







Similar content being viewed by others

References
Brown, R.: Not just observable, but how observable. In: Proceedings of the National Electronic Conference, vol. 22, pp 709–714 (1966)
Hahn, J., Edgar, T.: An improved method for nonlinear model reduction using balancing of empirical gramians. Comput. Chem. Eng. 26, 1379–1397 (2002)
Hahn, J., Edgar, T., Marquardt, W.: Controllability and observability covariance matrices for the analysis and order reduction of stable nonlinear systems. J. Process Control 13, 115–127 (2003)
Hermann, R., Krener, A.J.: Nonlinear controllability and observability. IEEE Trans. Autom. Control 22(5), 728–740 (1977)
Krener, A., Ide, K.: Measures of unobservability. In: Proceedings of the IEEE Conference on Decision and Control, pp 6401–6406 (2009)
Lall, S., Marsden, J., Glavaski, S.: Empirical model reduction of controlled nonlinear systems. In: Proceedings of the IFAC World Congress (1999)
Lall, S., Marsden, J., Glavaski, S.: A subspace approach to balanced truncation for model reduction of nonlinear control systems. Int. J. Robust Nonlinear Control 12(6), 519–539 (2002)
Lovell, T., Lee, T.: Nonlinear observability for relative satellite orbits with angles-only measurements. In: Proceedings of the International Symposium on Space Flight Dynamics (2014)
Monzingo, R.: A note on sensitivity of system observability. IEEE Trans. Autom. Control 12(3), 314–315 (1967)
Müller, P., Weber, H.: Analysis and optimization of certain qualities of controllability and observability for linear dynamical systems. Automatica 8(3), 237–246 (1972)
Newman, A., Krishnaprasad, P.: Computation for nonlinear balancing. In: Proceedings of the IEEE Conference on Decision and Control, pp. 4103–4104 (1998)
Nijmeijer, H., van der Schaft, A.: Nonlinear Dynamical Control Systems. Springer (1990)
Patel, H., Lovell, T.A., Allgeier, S., Russell, R., Sinclair, A.: Relative navigation for satellites in close proximity using angles-only observations. In: Proceedings of the AAS/AIAA Space Flight Mechanics Meeting (2012). AAS 12-202
Scherpen, J.: Balancing for nonlinear systems. Syst. Control Lett. 21, 143–153 (1993)
Scherpen, J.: Balancing for Nonlinear Systems. Ph.D. dissertation. University of Twente (1994)
Woffinden, D., Geller, D.: Observability criteria for angles-only navigation. IEEE Trans. Aerosp. Electron. Syst. 45(3), 1194–1208 (2009)
Yim, J., Crassidis, J., Junkins, J.: Autonomous orbit navigation of two spacecraft system using relative line of sight vector measurements. In: Proceedings of the AAS/AIAA Spaceflight Mechanics Meeting (2004). AAS 04-257
Author information
Authors and Affiliations
Corresponding author
Additional information
This research has been supported in part by NSF under the grants CMMI-1243000 (transferred from 1029551), CMMI-1335008, and CNS-1337722.
Rights and permissions
About this article

Cite this article
Kaufman, E., Lovell, T.A. & Lee, T. Nonlinear Observability for Relative Orbit Determination with Angles-Only Measurements. J of Astronaut Sci 63, 60–80 (2016). https://doi.org/10.1007/s40295-015-0082-9
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40295-015-0082-9