
Abstract
In this paper, the desired yaw orientation for an autonomous underwater vehicle is attained by acquiring a cascaded control structure based on a robust optimal control algorithm with a backstepping approach. A robust state feedback optimal control law is designed to control the yaw rate. Hence, the desired yaw rate is intended to be obtained by the backstepping controller by controlling the desired yaw orientation. The implementation of the proposed robust control algorithm is formulated by using semi-definite programming. A linear quadratic regulator in terms of linear matrix inequality is designed to address the control problem. The design of robust optimal control law in the steering plane is achieved by considering an uncertain polytopic AUV system. Realization of the proposed control algorithm is conducted in MATLAB/Simulink environment using the YALMIP tool. Robust behavior is ensured by the proposed control algorithm while tracking the desired yaw. The robustness analysis is extended by considering the various ranges of specific uncertain parameters to highlight the efficacies of the proposed control algorithm.









Similar content being viewed by others


Abbreviations
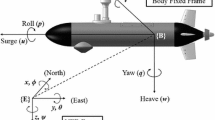
- NED:
-
North, East and Down direction
- \(\{Y\}\) :
-
Body fixed frame
- \(\{N\}\) :
-
NED frame
- \(\{F\}\) :
-
Serret–Frenet reference frame
- m :
-
Mass of the AUV
- \(u_\mathrm{s},v_\mathrm{s},r_\mathrm{s}\) :
-
Linear and angular velocities
- \(x_\mathrm{s},y_\mathrm{s},\psi _\mathrm{s}\) :
-
Linear and angular positions
- \(I_x,I_y,I_z\) :
-
Moments of inertia about x, y and z axes in body-fixed frame
- (\(x_\mathrm{B}, y_\mathrm{B}, z_\mathrm{B}\)):
-
Center of buoyancy
- (\(x_\mathrm{G}, y_\mathrm{G}, z_\mathrm{G}\)):
-
Center of gravity
- \(T_\mathrm{d}\) :
-
Total thrust in vertical plane
- \(\epsilon \) :
-
Lyapunov function
- \(\delta _\mathrm{r}\) :
-
Rudder angle
- \(d_{FN}\) :
-
Position of \(\{F\}\) frame relative to \(\{N\}\) frame
- \(d_{YF}\) :
-
Position of \(\{Y\}\) frame relative to \(\{F\}\) frame
- \(d_{YN}\) :
-
Position of \(\{Y\}\) frame relative to \(\{N\}\) frame
- \(c_{\mathrm{f}}\) :
-
Curvilinear abscissa along the path
- \(\psi _{\mathrm{f}}\) :
-
Yaw angle between \(\{N\}\) and \(\{F\}\) coordinate system
- s:
-
Parameters of steering plane
- D:
-
Desired values for path following
- f:
-
Parameters of Serret–Frenet frame
References
Palomeras, N.; Furfaro, T.; Williams, D.P.; Carreras, M.; Dugelay, S.: Automatic target recognition for mine countermeasure missions using forward-looking sonar data. IEEE J. Ocean. Eng. 47(1), 141–161 (2022). https://doi.org/10.1109/JOE.2021.3103269
Jung, J.; Park, J.; Choi, J.; Choi, H.-T.: Bathymetric pose graph optimization with regularized submap matching. IEEE Access 10, 31155–31164 (2022)
Hu, S.; Feng, A.; Shi, J.; Li, J.; Khan, F.; Zhu, H.; Chen, J.; Chen, G.: Underwater gas leak detection using an autonomous underwater vehicle (robotic fish). Process Saf. Environ. Protect. 167, 89–96 (2022)
Lapierre, L.; Soetanto, D.: Nonlinear path-following control of an auv. Ocean Eng. 34(11–12), 1734–1744 (2007)
Xiang, X.; Liu, C.; Lapierre, L.; Jouvencel, B.: Synchronized path following control of multiple homogenous underactuated auvs. J. Syst. Sci. Complex. 25(1), 71–89 (2012)
Feng, Z.-P.; Allen, R.: \({{H}_{\infty }}\) autopilot design for autonomous underwater vehicles. J. Shanghai Jiaotong Univ. Sci. 15(2), 194–198 (2010)
Petrich, J.; Stilwell, D.J.: Robust control for an autonomous underwater vehicle that suppresses pitch and yaw coupling. Ocean Eng. 38(1), 197–204 (2011)
Kamarlouei, M.; Ghassemi, H.: Robust control for horizontal plane motions of autonomous underwater vehicles. J. Braz. Soc. Mech. Sci. Eng. 38(7), 1921–1934 (2016)
Rath, B.N.; Subudhi, B.: A robust model predictive path following controller for an autonomous underwater vehicle. Ocean Eng. 244, 110265 (2022)
Spencer, D.A.; Wang, Y.: Slqr suboptimal human-robot collaborative guidance and navigation for autonomous underwater vehicles. In: 2015 American Control Conference (ACC), pp. 2131–2136 (2015). https://doi.org/10.1109/ACC.2015.7171048
Kim, E.; Fan, S.; Bose, N.; Nguyen, H.: Current estimation and path following for an autonomous underwater vehicle (auv) by using a high-gain observer based on an auv dynamic model. Int. J. Control Autom. Syst. 19(1), 478–490 (2021)
Wei, Y.; Zheng, Z.; Li, Q.; Jiang, Z.; Yang, P.: Robust tracking control of an underwater vehicle and manipulator system based on double closed-loop integral sliding mode. Int. J. Adv. Robot. Syst. 17(4), 1729881420941778 (2020)
Liang, X.; Wan, L.; Blake, J.I.; Shenoi, R.A.; Townsend, N.: Path following of an underactuated auv based on fuzzy backstepping sliding mode control. Int. J. Adv. Robot. Syst. 13(3), 122 (2016)
Kim, K.; Ura, T.: Optimal guidance for autonomous underwater vehicle navigation within undersea areas of current disturbances. Adv. Robot. 23(5), 601–628 (2009)
Roy, S.; Shome, S.; Nandy, S.; Ray, R.; Kumar, V.: Trajectory following control of auv: a robust approach. J. Inst. Eng. India Ser. C 94(3), 253–265 (2013)
Melo, J.; Matos, A.: A data-driven particle filter for terrain based navigation of sensor-limited autonomous underwater vehicles. Asian J. Control 21(4), 1659–1670 (2019)
Zheng, J.; Song, L.; Liu, L.; Yu, W.; Zhu, S.; Wang, Y.; Chen, C.: Fixed-time extended state observer-based trajectory tracking control for autonomous underwater vehicles. Asian J. Control 24(2), 686–701 (2022)
Batista, P.; Silvestre, C.; Oliveira, P.: A two-step control approach for docking of autonomous underwater vehicles. Int. J. Robust Nonlinear Control 25(10), 1528–1547 (2015)
Zhang, Y.; Gao, J.; Chen, Y.; Bian, C.; Zhang, F.; Liang, Q.: Adaptive neural network control for visual docking of an autonomous underwater vehicle using command filtered backstepping. Int. J. Robust Nonlinear Control 32(8), 4716–4738 (2022)
Liu, F.; Shen, Y.; He, B.; Wang, D.; Wan, J.; Sha, Q.; Qin, P.: Drift angle compensation-based adaptive line-of-sight path following for autonomous underwater vehicle. Appl. Ocean Res. 93, 101943 (2019)
Jiao, C.; Yu, L.; Su, X.; Wen, Y.; Dai, X.: Adaptive hybrid impedance control for dual-arm cooperative manipulation with object uncertainties. Automatica 140, 110232 (2022)
Mahapatra, S.; Subudhi, B.; Rout, R.: Diving control of an autonomous underwater vehicle using nonlinear \({{H}_{\infty }}\) measurement feedback technique. In: OCEANS 2016-Shanghai, pp. 1–5 (2016). IEEE
Mahapatra, S.; Subudhi, B.: Design of a steering control law for an autonomous underwater vehicle using nonlinear \({{H}_{\infty }}\) state feedback technique. Nonlinear Dyn. 90(2), 837–854 (2017)
Mahapatra, S.; Subudhi, B.: Design and experimental realization of a backstepping nonlinear \({{H}_{\infty }}\) control for an autonomous underwater vehicle using a nonlinear matrix inequality approach. Trans. Inst. Meas. Control 40(11), 3390–3403 (2018)
Mahapatra, S.; Subudhi, B.: Nonlinear matrix inequality approach based heading control for an autonomous underwater vehicle with experimental realization. IFAC J. Syst. Control 16, 100138 (2021)
Mahapatra, S.; Subudhi, K.B.; Rout, B.R.: Nonlinear \({{H}_{\infty }}\) control for an autonomous underwater vehicle in the vertical plane. IFAC-PapersOnLine 49, 391–395 (2016)
Mahapatra, S.; Subudhi, B.: Nonlinear \({{H}_{\infty }}\) state and output feedback control schemes for an autonomous underwater vehicle in the dive plane. Trans. Inst. Meas. Control 40, 2024–2038 (2018)
Vadapalli, S.; Mahapatra, S.: 3d path following control of an autonomous underwater robotic vehicle using backstepping approach based robust state feedback optimal control law. J. Mar. Sci. Eng. 11(2), (2023). https://doi.org/10.3390/jmse11020277
Londhe, P.; Mohan, S.; Patre, B.; Waghmare, L.: Robust task-space control of an autonomous underwater vehicle-manipulator system by pid-like fuzzy control scheme with disturbance estimator. Ocean Eng. 139, 1–13 (2017)
Zendehdel, N.; Gholami, M.: Robust self-adjustable path-tracking control for autonomous underwater vehicle. Int. J. Fuzzy Syst. 23(1), 216–227 (2021)
Li, Y.; Ma, T.; Chen, P.; Jiang, Y.; Wang, R.; Zhang, Q.: Autonomous underwater vehicle optimal path planning method for seabed terrain matching navigation. Ocean Eng. 133, 107–115 (2017)
King, P.; Vardy, A.; Forrest, A.L.: Teach-and-repeat path following for an autonomous underwater vehicle. J. Field Robot. 35(5), 748–763 (2018)
Zhang, Q.; Lin, J.; Sha, Q.; He, B.; Li, G.: Deep interactive reinforcement learning for path following of autonomous underwater vehicle. IEEE Access 8, 24258–24268 (2020). https://doi.org/10.1109/ACCESS.2020.2970433
Guo, K.; Pan, Y.; Zheng, D.; Yu, H.: Composite learning control of robotic systems: a least squares modulated approach. Automatica 111, 108612 (2020)
Veselỳ, V.; Ilka, A.: Generalized robust gain-scheduled pid controller design for affine lpv systems with polytopic uncertainty. Syst. Control Lett. 105, 6–13 (2017)
Bedioui, N.; Houimli, R.; Besbes, M.: Simultaneous sensor and actuator fault estimation for continuous-time polytopic lpv system. Int. J. Syst. Sci. 50(6), 1290–1302 (2019)
Hu, C.; Jaimoukha, I.M.: New iterative linear matrix inequality based procedure for \({{H}_{2}}\)and \({{H}_{\infty }}\) state feedback control of continuous-time polytopic systems. Int. J. Robust Nonlinear Control 31(1), 51–68 (2021)
Abolpour, R.; Dehghani, M.; Talebi, H.A.: Output feedback controller design for discrete lti systems with polytopic uncertainty via direct searching of the design space. Asian J. Control 6, 66 (2021)
Li, L.; Lu, Y.; Meng, X.: Preview control of polytopic time-varying systems subject to actuator saturation. Asian J. Control 6, 66 (2022)
Zhang, J.; Swain, A.K.; Nguang, S.K.: Robust observer-based fault diagnosis for nonlinear systems using matlab® (2016)
Lakhekar, G.V.; Waghmare, L.M.; Jadhav, P.G.; Roy, R.G.: Robust diving motion control of an autonomous underwater vehicle using adaptive neuro-fuzzy sliding mode technique. IEEE Access 8, 109891–109904 (2020)
Silvestre, C.; Pascoal, A.: Control of the infante auv using gain scheduled static output feedback. Control Eng. Pract. 12(12), 1501–1509 (2004)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
There is no conflict of interest in this manuscript.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Vadapalli, S., Mahapatra, S. A Robust State Feedback Optimal Control Law with Backstepping Approach for Steering Control of an Autonomous Underwater Vehicle Using Semi-definite Programming. Arab J Sci Eng 48, 14449–14462 (2023). https://doi.org/10.1007/s13369-023-07689-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13369-023-07689-w