
Abstract
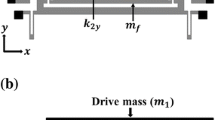
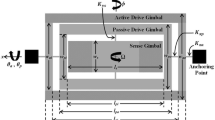
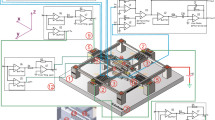
This paper reports a structural configuration of a capacitive gyroscope having 1-DOF drive and anchored 2-DOF sense modes that allows a wide sense bandwidth and high gain without much scaling down the mass on which the sensing comb fingers are attached. The use of the additional anchoring beam in the sense direction also causes the enhancement in the coupling strength of sense mode resonance frequencies. This device has been mathematically modeled considering decoupled frame anchoring effect, designed and then fabricated by using the economical UV-LIGA technology with nickel as a key structural layer of 9-μm thickness with unequally spaced sense comb fingers with 4 µm and 12 µm capacitive gap, respectively. The overall miniature device size is 3 mm × 3 mm. Vibration characterization of the fabricated devices shows sense mode resonances at 4.96 kHz and 5.58 kHz and drive resonance at 5.48 kHz.







Similar content being viewed by others
References
N. Yazdi, F. Ayazi, K. Najafi, Micromachined inertial sensors, in Proceedings of the IEEE 86 (1998) pp. 1640–1659
J. Soderkvist, Micromachined gyroscopes. Sens. Actuators A 43, 65–71 (1994)
S.E Alper, MEMS gyroscopes for tactical-grade inertial measurement applications. Ph.D. dissertation Middle East Technical University Turkey. (2005)
K. Liu, W. Zhang, W. Chen, K. Li, F. Dai, F. Cui, X. Wu, G. Ma, Q. Xiao, The development of micro-gyroscope technology. J. Micromech. Microeng. 19, 113001 (2009)
K.J. Walchko, P.A.C. Mason, Inertial Navigation, in Conference on Recent Advances in Robotics, Florida, (2002) pp. 1–9
J. Borenstein, H.R. Everett, L. Feng, D. Wehe, Mobile robot positioning & sensors and techniques. J.Rob. Syst. 14, 231–249 (1997)
H.H.S. Liu, G.K.H. Pang, Accelerometer for mobile robot positioning. IEEE Trans. Ind. App. 37, 812–819 (2001)
J. Huddleston, A. Alaiti, D. Scarborough, A. Freiberg, H. Rubash, H. Malchau, W. Harris, D. Krebs, Ambulatory measurement of knee motion and physical activity: preliminary evaluation of a smart activity monitor. J. Neu. Eng. Rehabilit. 3, 1–10 (2006)
H.J. Luingea, P.H. Veltinkb, C.T.M. Baten, Ambulatory measurement of arm orientation. J. Biomech. 40, 78–85 (2007)
A.K. Bourke, J.V.O. Brien, G.M. Lyons, Evaluation of a threshold-based tri-axial accelerometer fall detection algorithm. Gait Posture 26, 194–199 (2007)
Y. Tao, H. Hu, A novel sensing and data fusion system for 3-D arm motion tracking in telerehabilitation. IEEE Trans. Instrum. Meas. 57, 1029–1040 (2008)
M.J. Mathie, B.G. Celler, N.H. Lovell, A.C.F. Coster, Classification of basic daily movements using a triaxial accelerometer. Med. Bio. Eng. Comput. 42, 679–687 (2004)
R. Antonello, R. Oboe, MEMS gyroscopes for consumers and industrial applications, in Microsensors. ed. by O. Minin (Intech, London, 2011), pp.253–275
P. Xu, Z. Wei, Z. Guo, L. Jia, G. Han, C. Si, J. Ning, F. Yang, A real-time circuit phase delay correction system for MEMS vibratory gyroscopes. Micromachines 12(5), 506 (2021)
S.A.R. Bukhari, M.M. Saleem, U.S. Khan, A. Hamza, J. Iqbal, R.I. Shakoor, Microfabrication process-driven design, FEM analysis and system modeling of 3-DoF drive mode and 2-DoF sense mode thermally stable non-resonant MEMS gyroscope. Micromachines 11(9), 862 (2020)
A. Esmaeili, M.A. Kupaei, H. Faghihian, H.R. Mirdamadi, An adaptable broadband MEMS vibratory gyroscope by simultaneous optimization of robustness and sensitivity parameters. Sens. Actuators A Phys. 206, 132–137 (2014)
A.R. Schofield, A.A. Trusov, A.M. Shkel, Micromachined gyroscope concept allowing interchangeable operation in both robust and precision modes. Sens. Actuators A Phy. 165, 35–42 (2011)
R.K. Kupka, F. Bouamrane, C. Cremers, S. Megtert, Microfabrication: LIGA-X and applications. Appl. Surf. Sci. 164, 97–110 (2000)
C. Acar, A.M. Shkel, Four degrees-of-freedom micromachined gyroscopes. J. Model. Simul. Microsyst. 2, 71–82 (2001)
C. Acar, Robust micromachined vibratory gyroscopes, Ph.D. dissertation University of California Irvin.(2004)
P. Verma, C. Shekhar, S.K. Arya, R. Gopal, New design architecture of a 3-DOF vibratory gyroscope with robust drive operation mode and implementation. Microsyst. Technol. 21(8), 1275–1285 (2015)
P. Verma, K.Z. Khan, S.N. Khonina, N.L. Kazanskiy, R. Gopal, Ultraviolet-LIGA-based fabrication and characterization of a nonresonant drive-mode vibratory gyro/accelerometer. J. Micro/Nanolithogr. MEMS MOEMS 15(3), 035001 (2016)
P. Verma, S.K. Arya, R. Gopal, Lumped parameter analytic modeling and behavioral simulation of a 3-DOF MEMS gyro-accelerometer. Acta Mech. Sinica 31(6), 910–919 (2015)
P. Verma, R. Gopal, S. K. Arya, Dynamic characteristics of vibratory gyro-accelerometer, in Proceeding of the IEEE, 5th International Conference on Computers and Devices for Communication, University of Calcutta, India, (2012) https://doi.org/10.1109/CODEC.2012.6509277.
P. Verma, P. Agrawal, R. Gopal, S.K. Arya, Parametric sensitivity analysis of a 2-DOF drive and 1-DOF sense modes MEMS gyro-accelerometer structure. Adv. Sci. Lett. 20, 1495–1498 (2014)
P. Verma, S. Juneja, D.A. Savelyev, S.N. Khonina, R. Gopal, Design and fabrication of a 1-DOF drive mode and 2-DOF sense mode micro-gyroscope using SU-8 based UV-LIGA process, in Proceedings of the AIP 1724, (2016) https://doi.org/10.1063/1.4945137
Acknowledgements
The authors wish to thank all members of MEMS and Micro-sensors Group at CSIR-CEERI, Pilani, India. The authors are also thankful to Dr. Prabhash Mishra for his support in SEM measurements at Jamia Millia Islamia University, New Delhi, India.
Funding
This study was not funded by grant.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The author declares that they have no conflict of interest.
Ethical approval
This article does not contain any studies with animals performed by any of the authors. This article does not contain any studies with human participants or animals performed by any of the authors.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Prakruthi, H.L., Saara, K. Analytical modeling, fabrication and characterization of a 3-DOF MEMS gyroscope based on UV-LIGA process. J Opt 53, 1068–1078 (2024). https://doi.org/10.1007/s12596-023-01258-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12596-023-01258-y