
Abstract
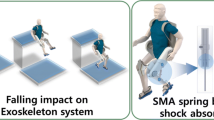
Powered exoskeletons for people with complete paraplegia are subject to repetitive large impacts due to the recurrent ground contacts. Those impact forces not only deteriorate the ride comfort but also cause a serious damage to the musculoskeletal system of the human wearing the powered exoskeleton. To address the issue, a mechanism to absorb shock for powered exoskeletons are proposed in this paper. The proposed shock absorption mechanism was integrated into the WalkON Suit, a powered exoskeleton for complete paraplegics. To obtain the desired performance of the proposed mechanism, the gait pattern of the powered exoskeleton was also designed. The mechanism and gait pattern generation algorithm were verified from experiments with a human subject.
Similar content being viewed by others

References
J. Choi, K.-W. Park, J. Park, and K. Kong, “The history and future of the walkon suit: A powered exoskeleton for people with disabilities,” IEEE Industrial Electronics Magazine, vol 16, no. 4, pp. 16–28, 2022.
B. Peterson, M. Daniel, V. Subra Mani, B. Arnold, T. Craig, J. Gines, C. Gonzalez, W. Howell, B. Shrewsbury, M. Bellman, P. Neuhaus, and R. Griffin, “Team IHMC at the 2020 cybathlon: a user-centered approach towards personal mobility exoskeletons,” Journal of NeuroEngineering and Rehabilitation, vol. 19, Article number 103, 2022.
V. Huynh, G. Burger, Q. V. Dang, R. Pelgé, G. Boéris, J. W. Grizzle, A. D. Ames, and M. Masselin, “Versatile dynamic motion generation framework: Demonstration with a crutch-less exoskeleton on real-life obstacles at the cybathlon 2020 with a complete paraplegic person,” Frontiers in Robotics and AI, vol. 8, 2021.
H.-g. Kim, J.-w. Lee, J.-w. Lee, J. Jang, S. Park, and C. Han, “Design of an exoskeleton with minimized energy consumption based on using elastic and dissipative elements,” International Journal of Control, Automation, and Systems, vol. 13, pp. 463–474, 04 2015.
Q. Guo, Z. Chen, Y. Yan, W. Xiong, D. Jiang, and Y. Shi, “Model identification and human-robot coupling control of lower limb exoskeleton with biogeography-based learning particle swarm optimization,” International Journal of Control, Automation and Systems, vol. 13, pp. 589–600, 2022.
F. H. M. van Herpen, van R. B. Dijsseldonk, H. Rijken, N. L. W. Keijsers, J. W. K. Louwerens, and I. J. W. van Nes, “Case report: Description of two fractures during the use of a powered exoskeleton,” Spinal Cord Series and Cases, vol. 5, Article number 99, 2019.
J. Ueda, M. Turkseven, E. Kim, Q. Lowery, C. Bivens, and M. Mayo, “Shock absorbing exoskeleton for vertical mobility system: Concept and feasibility study,” Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 3342–3349, 2018.
S. Lee, S. Lee, Y. Na, B. Ahn, H. Jung, S. S. Cheng, N. Kim, T.-S. Jun, and Y. Kim, “Shock absorber mechanism based on an sma spring for lightweight exoskeleton applications,” International Journal of Precision Engineering and Manufacturing, vol. 20, pp. 1533–1541, 2019.
C. Huang, W. Chen, J. Liu, and J. Zhang, “Design of a compliant joint actuator for lower-limb exoskeleton robot,” Proc. of 12th IEEE Conference on Industrial Electronics and Applications (ICIEA), pp. 1522–1527, 2017.
S. Hyon and T. Emura, “Symmetric walking control: Invariance and global stability,” Proc. of the IEEE International Conference on Robotics and Automation, pp. 1443–1450, 2005.
J. J. Rond, M. C. Cardani, M. I. Campbell, and J. W. Hurst, “Mitigating Peak Impact Forces by Customizing the Passive Foot Dynamics of Legged Robots,” Journal of Mechanisms and Robotics, vol. 12, no. 5, 051010, 2020.
W. Choi, C. Zhou, G. A. Medrano-Cerda, D. G. Caldwell, and N. G. Tsagarakis, “A new foot sole design for humanoids robots based on viscous air damping mechanism,” Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 4498–4503, 2015.
J. Qingxuan, L. Tong, C. Gang, S. Hanxu, and Z. Jian, “Trajectory optimization for velocity jumps reduction considering the unexpectedness characteristics of space manipulator joint-locked failure,” International Journal of Aerospace Engineering, vol. 15, pp. 1047–1053, 2016.
L. Zhang, G. Song, C. Zou, H. Cheng, R. Huang, and J. Qiu, “Knee trajectory modulation for impact reducing of lower limb exoskeletons,” Proc. of IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 160–167, 2021.
S. Lohmeier, T. Buschmann, and H. Ulbrich, “System design and control of anthropomorphic walking robot lola,” IEEE/ASME Transactions on Mechatronics, vol. 14, no. 6, pp. 658–666, 2009.
F. Russell, Y. Takeda, P. Kormushev, R. Vaidyanathan, and P. Ellison, “Stiffness modulation in a humanoid robotic leg and knee,” IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 2563–2570, 2021.
H. Dallali, P. Kormushev, N. G. Tsagarakis, and D. G. Caldwell, “Can active impedance protect robots from landing impact?” Proc. of IEEE-RAS International Conference on Humanoid Robots, pp. 1022–1027, 2014.
J. Park, D. Lee, K.-W. Park, and K. Kong, “Reduction of ground impact of a powered exoskeleton by shock absorption mechanism on the shank,” Proc. of IEEE International Conference on Robotics and Automation (ICRA), pp. 2085–2090, 2021.
K. Kong and M. Tomizuka, “A gait monitoring system based on air pressure sensors embedded in a shoe,” IEEE/ASME Transactions on Mechatronics, vol. 14, no. 3, pp. 358–370, 2009.
D. Sanz-Merodio, M. Cestari, J. Arevalo, X. Carrillo, and E. Garcia, “Generation and control of adaptive gaits in lower-limb exoskeletons for motion assistance,” Advanced Robotics, vol. 28, no. 5, pp. 329–338, 2014.
T. Vouga, R. Baud, J. Fasola, M. Bouri, and H. Bleuler, “TWIICE–A lightweight lower-limb exoskeleton for complete paraplegics,” Proc. of International Conference on Rehabilitation Robotics (ICORR), pp. 1639–1645, 2017.
W. Yang, J. Zhang, S. Zhang, and C. Yang, “Lower limb exoskeleton gait planning based on crutch and human-machine foot combined center of pressure,” Sensors, vol. 20, no. 24, 7216, 2020.
J. Choi, B. Na, P. Jung, D. Rha, and K. Kong, “Joint trajectory generation and motion control of a wearable robot for complete paraplegics based on forward inflection walking,” Proc. of IEEE Conference on Control Technology and Applications (CCTA), pp. 1277–1281, 2017.
K.-W. Park, D. Lee, and K. Kong, “Development of FSR-crutch module for real-time evaluation of walking performance in the rehabilitative applications,” Journal of Institute of Control, Robotics and Systems (in Korean), vol. 26, pp. 856–862, 2020.
Author information
Authors and Affiliations
Corresponding author
Additional information
Conflict of Interest
The authors declare that there is no competing financial interest or personal relationship that could have appeared to influence the work reported in this paper.
Jeongsu Park received his B.Eng. degree in mechanical engineering in 2019 and an M.S. degree in mechanical engineering in 2021 from Korea Advanced Institute of Science and Technology (KAIST), Daejeon, Korea. He has been a member of Team Angel Robotics which won the Gold Medal and Bronze Medal of Cybathlon 2020. He received the KAIST Global Leadership Awards in 2021. His current research interests include hardware design and system control of powered exoskeleton for paraplegics. He is now developing WalkON Suit V, which will make people with paraplegia walk independently and get them out of wheelchairs.
Daeho Lee is a Researcher at the Agency for Defense Development in Daejeon, Korea. He received his B.Eng. degree (magna cum laude) in mechanical engineering with a minor in business and technology management in 2020, and an M.S. degree in mechanical engineering in 2022 from the Korea Advanced Institute of Science and Technology (KAIST), Daejeon, Korea. He has been a member of Team Angel Robotics which won the Gold Medal and Bronze Medal of Cybathlon 2020. He received the KAIST Global Leadership Awards in 2021. His current research interests include design and control of human-assistive robots, modeling of human-body dynamics, and sensor technology related to human-intention recognition.
Kyoungchul Kong received his B.Eng. degree (summa cum laude) in mechanical engineering, a B.S. degree in physics in 2004, an M.S. degree in mechanical engineering in 2006 from Sogang University, Seoul, Korea, and a Ph.D. degree in mechanical engineering from the University of California at Berkeley, CA, USA, in 2009, where he later became a Postdoctoral Research Fellow until 2011. In 2011, he joined the Department of Mechanical Engineering, Sogang University, as an assistant professor. He is currently an associate professor of the Department of Mechanical Engineering, Korea Advanced Institute of Science and Technology (KAIST). He is a founder and the CEO of Angel Robotics, a start-up company for productizing wearable robots. Dr. Kong received the Best Innovation Award from the President of Korea in 2017, the Commendation by the Minister of Commerce, Industry and Energy in 2017, the Bronze Medal of Cybathlon 2016, the Young Researcher Award of IFAC Mechatronics TC in 2016, the Gold Medal and Bronze Medal of Cybathlon 2020, and many others.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work was supported by the National Research Foundation of Korea (NRF) grant funded by the Korea government (MSIT) (2022R1A3B1077880).
Rights and permissions
About this article

Cite this article
Park, J., Lee, D. & Kong, K. Shank Shock Absorption Mechanism and Associated Gait Pattern Design for Reduction of Ground Impact of a Powered Exoskeleton. Int. J. Control Autom. Syst. 21, 1959–1969 (2023). https://doi.org/10.1007/s12555-022-0905-y
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12555-022-0905-y