
Abstract
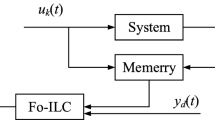
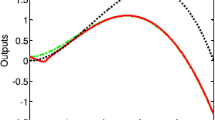
This article addresses a fractional-order iterative learning control (FOILC) design problem for linear time-varying systems with nonuniform trial lengths. A closed-loop FOILC updating law is introduced for tracking tasks with nonuniform trial lengths. To mitigate the influence of nonuniform trail lengths, redefined tracking errors along with current iteration information are adopted to construct control signal. Strict convergence analysis of the tracking error in iteration domain is given. Finally, the efficiency and performance of the proposed approach are verified by three illustrative examples.
Similar content being viewed by others

References
A. Tepljakov, Fractional-order Modeling and Control of Dynamic Systems, Springer, 2017.
Y. Zhao, Y. Li, F. Zhou, Z. Zhou, and Y. Chen, “An iterative learning approach to identify fractional order KiBaM model,” IEEE/CAA Journal of Automatica Sinica, vol. 4, no. 2, pp. 322–331, 2017.
Y. Xie, X. Tang, B. Song, X. Zhou, and Y. Guo, “Model-free tuning strategy of fractional-order PI controller for speed regulation of permanent magnet synchronous motor,” Transactions of the Institute of Measurement and Control, vol. 41, no. 1, pp. 23–35, 2019.
D. Xue, Fractional-order Control Systems: Fundamentals and Numerical Implementations,” vol. 1, Walter de Gruyter GmbH & Co KG, 2017.
I. Pan and S. Das, “Kriging based surrogate modeling for fractional order control of microgrids,” IEEE Transactions on Smart Grid, vol. 6, no. 1, pp. 36–44, 2014.
T. Hou, Y. Y. Liu, and F. Q. Deng, “Finite horizon H2/H∞ control for SDEs with infinite Markovian jumps,” Nonlinear Analysis: Hybrid Systems, vol. 34, pp. 108–120, 2019.
T. Hou, Y. Y. Liu, and F. Q. Deng, “Stability for discrete-time uncertain systems with infinite Markov jump and time-delay,” Science China Information Sciences, vol. 64, no. 1, p. 152202, 2021.
S. Arimoto, S. Kawamura, and F. Miyazaki, “Bettering operation of robots by learning,” Journal of Robotic Systems, vol. 1, no. 2, pp. 123–140, 1984.
Y. M. Zhao, Y. Lin, F. Xi, and S. Guo, “Calibration-based iterative learning control for path tracking of industrial robots,” IEEE Transactions on Industrial Electronics, vol. 62, no. 5, pp. 2921–2929, 2014.
A. Zhang, S. Ma, B. Li, and M. Wang, “Tracking control of tangential velocity of Eel robot based on iterative learning control,” Robot (in Chinese), vol. 40, no. 6, pp. 3–12, 2018.
P. Gu and S. P. Tian, “P-type iterative learning control with initial state learning for one-sided Lipschitz nonlinear systems,” International Journal of Control, Automation, and Systems, vol. 17, no. 9, pp. 2203–2210, 2019.
J. Yu, H. Dang, and L. Wang, “Fuzzy iterative learning control-based design of fault tolerant guaranteed cost controller for nonlinear batch processes,” International Journal of Control, Automation, and Systems, vol. 16, no. 5, pp. 2518–2527, 2018.
Y. H. Lan, J. J. Xia, Y. P. Xia, and P. Li, “Iterative learning consensus control for multi-agent systems with fractional order distributed parameter models,” International Journal of Control, Automation, and Systems, vol. 17, no. 11, pp. 2839–2849, 2019.
X. Jin, “Adaptive iterative learning control for high-order nonlinear multi-agent systems consensus tracking,” Systems & Control Letters, vol. 89, pp. 16–23, 2016.
K. R. Simba, B. D. Bui, M. R. Msukwa, and N. Uchiyama, “Robust iterative learning contouring controller with disturbance observer for machine tool feed drives,” ISA Transactions, vol. 75, pp. 207–215, 2018.
Y. Li, Y. Chen, H. S. Ahn, and G. Tian, “A survey on fractional-order iterative learning control,” Journal of Optimization Theory and Applications, vol. 156, no. 1, pp. 127–140, 2013.
Y. Chen and K. L. Moore, “On Dα-type iterative learning control,” Proc. of the 40th IEEE Conference on Decision and Control, vol. 5, pp. 4451–4456, December 2001.
Y. Li, Y. Chen, and H. S. Ahn, “Fractional-order iterative learning control for fractional-order linear systems,” Asian Journal of Control, vol. 13, no. 1, pp. 54–63, 2011.
S. Liu, J. Wang, and W. Wei, “Analysis of iterative learning control for a class of fractional differential equations,” Journal of Applied Mathematics and Computing, vol. 53, no. 1–2, pp. 17–31, 2017.
L. Li, “Lebesgue-p NORM convergence of fractional-order PID-type iterative learning control for linear systems,” Asian Journal of Control, vol. 20, no. 1, pp. 483–494, 2018.
Y. H. Lan, “Iterative learning control with initial state learning for fractional order nonlinear systems,” Computers & Mathematics with Applications, vol. 64, no. 10, pp. 3210–3216, 2012.
L. Yan and J. Wei, “Fractional order nonlinear systems with delay in iterative learning control,” Applied Mathematics and Computation, vol. 257, pp. 546–552, 2015.
S. Liu, J. Wang, and W. Wei, “Iterative learning control based on a noninstantaneous impulsive fractional-order system,” Journal of Vibration and Control, vol. 22, no. 8, pp. 1972–1979, 2016.
J. Wang, M. Fečkan, and S. Liu, “Convergence characteristics of PD-type and PDDα-type iterative learning control for impulsive differential systems with unknown initial states,” Journal of Vibration and Control, vol. 24, no. 16, pp. 3726–3743, 2018.
J. Wei, Y. Zhang, and H. Bao, “An exploration on adaptive iterative learning control for a class of commensurate high-order uncertain nonlinear fractional order systems,” IEEE/CAA Journal of Automatica Sinica, vol. 5, no. 2, pp. 618–627, 2017.
K. Zhang and G. Peng, “PDα-type iterative learning control for fractional-order linear continuous-time switched systems,” Asian Journal of Control, vol. 22, no. 5, pp. 1951–1960, 2020.
R. W. Longman and K. D. Mombaur, “Investigating the use of iterative learning control and repetitive control to implement periodic gaits,” Fast Motions in Biomechanics and Robotics, Springer, Berlin, Heidelberg, pp. 189–218, 2006.
M. Ketelhut, S. Stemmler, J. Gesenhues, M. Hein, and D. Abel, “Iterative learning control of ventricular assist devices with variable cycle durations,” Control Engineering Practice, vol. 83, pp. 33–44, 2019.
D. Shen and X. Li, “A survey on iterative learning control with randomly varying trial lengths: Model, synthesis, and convergence analysis,” Annual Reviews in Control, vol. 48, pp. 89–102, 2019.
X. Li, J. X. Xu, and D. Huang, “An iterative learning control approach for linear systems with randomly varying trial lengths,” IEEE Transactions on Automatic Control, vol. 59, no. 7, pp. 1954–1960, 2013.
X. Li, J. X. Xu, and D. Huang, “Iterative learning control for nonlinear dynamic systems with randomly varying trial lengths,” International Journal of Adaptive Control and Signal Processing, vol. 29, no. 11, pp. 1341–1353, 2015.
D. Shen, W. Zhang, and J. X. Xu, “Iterative learning control for discrete nonlinear systems with randomly iteration varying lengths,” Systems & Control Letters, vol. 96, pp. 81–87, 2016.
T. Seel, T. Schauer, and J. Raisch, “Monotonic convergence of iterative learning control systems with variable pass length,” International Journal of Control, vol. 90, no. 3, pp. 393–406, 2017.
J. Shi, X. He, and D. Zhou, “Iterative learning control for nonlinear stochastic systems with variable pass length,” Journal of the Franklin Institute, vol. 353, no. 15, pp. 4016–4038, 2016.
S. Liu, A. Debbouche, and J. Wang, “On the iterative learning control for stochastic impulsive differential equations with randomly varying trial lengths,” Journal of Computational and Applied Mathematics, vol. 312, pp. 47–57, 2017.
X. Li and D. Shen, “Two novel iterative learning control schemes for systems with randomly varying trial lengths,” Systems & Control Letters, vol. 107, pp. 9–16, 2017.
L. Wang, X. Li, and D. Shen, “Sampled-data iterative learning control for continuous-time nonlinear systems with iteration-varying lengths,” International Journal of Robust and Nonlinear Control, vol. 28, no. 8, pp. 3073–3091, 2018.
D. Shen and J. X. Xu, “Adaptive learning control for nonlinear systems with randomly varying iteration lengths,” IEEE Transactions on Neural Networks and Learning Systems, vol. 30, no. 4, pp. 1119–1132, 2018.
S. Liu and J. Wang, “Fractional order iterative learning control with randomly varying trial lengths,” Journal of the Franklin Institute, vol. 354, no. 2, pp. 967–992, 2017.
S. Liu, J. Wang, D. Shen, and D. O’Regan, “Iterative learning control for noninstantaneous impulsive fractional-order systems with varying trial lengths,” International Journal of Robust and Nonlinear Control, vol. 28, no. 18, pp. 6202–6238, 2018.
Y. Zhao, Y. Li, F. F. Zhang, and H. Y. Liu, “Iterative learning control of fractional-order linear systems with nonuniform pass lengths,” Transactions of the Institute of Measurement and Control, pp. 1–10, 2022.
J. A. T. M. J. Sabatier, O. P. Agrawal, and J. T. Machado, Advances in Fractional Calculus, vol. 4, no. 9, Springer, Dordrecht, 2007.
Y. Zhao, F. Zhou, D. Wang, and Y. Li. “Design and analysis of fractional order PDα-type iterative learning control,” IFAC-PapersOnLine, vol. 50, no. 1, pp. 8077–8083, 2017.
C. T. Chen, and B. Shafai, Linear System Theory and Design, 3rd ed., Oxford University Press, New York, 1999.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work is supported by National Natural Science Foundation of China (Grant No.61773242, 61973193), Intelligent Robot and System Innovation Center Foundation (Grant No.2019IRS19), International cooperation project (Grant No.QLUTGJHZ2018019).
Yang Zhao received her M.S. and Ph.D. degrees from Shandong University, Jinan, China, in 2014 and 2019, respectively. She was an exchange Ph.D. student in the School of Engineering, University of California, Merced, from 2017 to 2018. Since 2019, she has been a Faculty Member of the School of Electrical Engineering and Automation, Qilu University of Technology. Her research interests include iterative learning control, applied fractional calculus in cybernetics, and robotics.
Yan Li received his Ph.D. degree in applied mathematics from Shandong University, Jinan, China, in 2008. He was a Visiting Scholar with CSOIS, Utah State University, from 2007 to 2010. Since 2010, he has been a Faculty Member of the School of Control Science and Engineering, Shandong University. His research interests include applied fractional calculus in cybernetics, test, modeling, and simulation of power batteries, big data analytics in power batteries and microbes, biomechanics, iterative learning control, high gain adaptive control, optimal control, and complex systems and networks.
Haiying Liu received her M.S. and Ph.D. degrees from the School of Control Science and Engineering, Shandong University, in 2007 and 2012, respectively. She was a joint Ph.D. student from August 2009 to August 2011 in the Department of Electrical and Computer Engineering, University of Victoria, Canada. She conducted research as a postdoctoral fellow in the Department of Electrical and Computer Engineering, Dalhousie University, Canada from February 2015 to August 2016. She joined the School of Electrical Engineering and Automation, Qilu University of Technology from 2013 and has been an Associate Professor from 2017. Her current research interests are mainly in the field of pattern recognition, digital image processing and robot vision, and stability analysis with application in mobile robots.
Rights and permissions
About this article

Cite this article
Zhao, Y., Li, Y. & Liu, H. Fractional-order Iterative Learning Control with Nonuniform Trial Lengths. Int. J. Control Autom. Syst. 20, 3167–3176 (2022). https://doi.org/10.1007/s12555-021-0536-8
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12555-021-0536-8