
Abstract
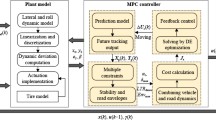
This paper proposes a path-following controller and a torque allocation strategy for a four-wheel-independent-drive (FWID) electric autonomous ground vehicle (EAGV) on the slope roads. To improve the real-time accuracy of the controller, a model-predictive-control (MPC) controller with a linear-parameter-varying (LPV) model is proposed to maintain the vehicle dynamic stability and follow the given path for the EAGV. By updating the parameters of the states, the proposed controller can minimize the effects of the unequal normal tire forces and the gravity components of the vehicle on the slope road. As a result, the desired trajectory of the lateral position, longitudinal position, yaw angle, and velocity can be tracked by controlling the front-wheel-steering angle and the driving torque of each wheel. Finally, the high-fidelity simulations have been implemented on the CarSim-Matlab platform, and the results show that the proposed LPV-MPC controller with the torque allocation strategy is effective to achieve the control targets.
Similar content being viewed by others

References
C. Hu, R. Wang, and F. Yan, “Integral sliding mode-based composite nonlinear feedback control for path following of four-wheel independently actuated autonomous vehicles,” IEEE Transactions on Transportation Electrification, vol. 2, no. 2, pp. 221–230, June 2016.
M. Yue, L. Yang, X. M. Sun, and W. Xia, “Stability control for FWID-EVs with supervision mechanism in critical cornering situations,” IEEE Transactions on Vehicular Technology, vol. 67, no. 11, pp. 10387–10397, November 2018.
Z. Liang, J. Chen, and Y. Wang, “Equivalent acceleration imitation for single wheel of manned lunar rover by varying torque on earth,” IEEE-ASME Transactions on Mechatronics, vol. 25, no. 1, pp. 282–293, February 2020.
H. Zhang, X. J. Zhang, and J. M. Wang, “Robust gain-scheduling energy-to-peak control of vehicle lateral dynamics stabilisation,” Vehicle System Dynamics, vol. 52, no. 3, pp. 309–340, March 2014.
H. Zhang, G. G. Zhang, and J. M. Wang, “H-infinity observer design for LPV systems with uncertain measurements on scheduling variables: Application to an electric ground vehicle,” IEEE/ASME Transactions on Mechatronics, vol. 21, no. 3, pp. 1659–1670, June 2016.
M. Y. Cui, W. Liu, H. Z. Liu, and Z. P. Wang, “Extended state observer-based adaptive sliding mode control of differential-driving mobile robot with uncertainties,” Nonlinear Systems, vol. 83, no. 1–2, pp. 667–683, January 2016.
H. N. Peng, W. D. Wang, Q. An, C. L. Xiang, and L. Li, “Path tracking and direct yaw moment coordinated control based on robust MPC with the finite time horizon for autonomous independent-drive vehicles,” IEEE Transactions on Vehicular Technology, vol. 69, no. 6, pp. 6053–6066, June 2020.
C. F. Hu, X. F. Wei, and Y. L. Ren, “Passive fault-tolerant control based on weighted LPV Tube-MPC for air-breathing hypersonic vehicles,” International Journal of Control, Automation, and Systems, vol. 17, no. 8, pp. 1957–1970, August 2019.
R. R. Wang, H. Zhang, and J. M. Wang, “Linear parameter-varying controller design for four-wheel independently actuated electric ground vehicles with active steering systems,” IEEE Transactions on Control Systems Technology, vol. 22, no. 4, pp. 1281–1296, July 2014.
W. F. Li, Z. C. Xie, J. Zhao, and P. K. Wong, “Velocity-based robust fault tolerant automatic steering control of autonomous ground vehicles via adaptive event triggered network communication,” Mechanical Systems and Signal Processing, vol. 143, p. 106798, September 2020.
Z. Y. Yang, J. Huang, Z. Y. Hu, and Z. H. Zhong, “Utilising bidirectional inequality constraints in optimal robust control for heterogeneous vehicular platoons,” IET Intelligent Transport Systems, vol. 14, no. 7, pp. 802–811, July 2020.
D. Rubin and S. A. Arogeti, “Vehicle yaw stability control using active limited-slip differential via model predictive control methods,” Vehicle System Dynamics, vol. 53, no. 9, pp. 1315–1330, September 2015.
S. Bououden, M. Chadli, L. X. Zhang, and T. Yang, “Constrained model predictive control for time-varying delay systems: Application to an active car suspension,” International Journal of Control, Automation, and Systems, vol. 14, no. 1, pp. 51–58, February 2016.
H. S. Abbas, J. Hanema, R. Toth, J. Mohammadpour, and N. Meskin, “An improved robust model predictive control for linear parameter-varying input-output models,” International Journal of Robust and Nonlinear Control, vol. 28, no. 3, pp. 859–880, February 2018.
J. Wang, J. Wang, R. Wang, and C. Hu, “A framework of vehicle trajectory replanning in lane exchanging with considerations of driver characteristics,” IEEE Transactions on Vehicular Technology, vol. 66, no. 5, pp. 3583–3596, May 2017.
W. W. Qin, H. Bing, L. Gang, and P. T. Zhao, “Robust model predictive tracking control of hypersonic vehicles in the presence of actuator constraints and input delays,” Journal of the Franklin Institute-Engineering and Applied Mathematics, vol. 353, no. 17, pp. 4351–4367, November 2016.
L. Cavanini, G. Cimini, and G. Lppoliti, “Computationally efficient model predictive control for a class of linear parameter-varying systems,” IET Control Theory and Applications, vol. 12, no. 10, pp. 1384–1392, July 2018.
L. S. Hu, B. A. Huang, and Y. Y. Cao, “Robust digital model predictive control for linear uncertain systems with saturations,” IEEE Transactions on Automatic Control, vol. 49, no. 5, pp. 792–796, May 2004.
M. Zhou, Z. C. Cao, M. C. Zhou, J. Wang, and Z. H. Wang, “Zonotoptic fault estimation for discrete-time LPV systems with bounded parametric uncertainty,” IEEE Transactions on Intelligent Transportation Systems, vol. 21, no. 2, pp. 690–700, February 2020.
Z. Liang, J. Zhao, B. Liu, Y. Wang, and Z. Deng, “Velocity-based path following control for autonomous vehicles to avoid exceeding road friction limits using sliding mode method,” IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 3, pp. 1947–1958, 2022.
J. Song, W. W. Zhang, X. C. Wu, H. T. Cao, Q. M. Gao, and S. Y. Luo, “Laser-based SLAM automatic parallel parking path planning and tracking for passenger vehicle,” IET Intelligent Transport Systems, vol. 13, no. 10, pp. 1577–1568, October 2019.
C. Hu, Y. M. Chen, and J. M. Wang, “Fuzzy observer-based transitional path-tracking control for autonomous vehicles,” IEEE Transactions on Intelligent Transportation Systems, vol. 22, no. 5, pp. 3078–3088, May 2021.
H. B. Gao, B. Cheng, J. Q. Wang, K. Q. Li, J. H. Zhao, and D. Y. Li, “Object classification using CNN-based fusion of vision and LIDAR in autonomous vehicle environment,” IEEE Transactions on Industrial Informatics, vol. 14, no. 9, pp. 4224–4231, September 2018.
Z. Liang, J. Chen, Y. F. Wang, L. Ding, H. B. Gao, and Z. Q. Deng, “Approach for imitation of manned lunar rover acceleration using a prototype vehicle with imitation handling ratio on the earth,” IEEE Transactions on Vehicular Technology, vol. 67, no. 7, pp. 5683–5694, July 2018.
A. Parra, D. Tavernini, P. Gruber, A. Sorniotte, A. Zubizarreta, and J. Perez, “On nonlinear model predictive control for energy-efficient torque-vectoring,” IEEE Tranactions on Vehicular Technology, vol. 70, no. 1, pp. 173–188, January 2021.
X. Ran, X. Zhao, J. Chen, C. Yang, and C. Yang, “Novel coordinated algorithm for traction control system on split friction and slope road,” International Journal of Automotive Technology, vol. 17, no. 5, pp. 817–827, October 2016.
Z. Liang, J. Zhao, Z. Dong, Y. Wang, and Z. Ding, “Torque vectoring and rear-wheel-steering control for vehicle’s uncertain slips on soft and slope terrain using sliding mode algorithm,” IEEE Transactions on Vehicular Technology, vol. 69, no. 4, pp. 3805–3815, April 2020.
L. Ding, S. Li, H. B. Gao, C. Chen, and Z. Q. Deng, “Adaptive partial reinforcement learning neural network-based tracking control for wheeled mobile robotic systems,” IEEE Transactions on Systems, Man, and Cybernetics: Systems, vol. 50, no. 7, pp. 2512–2523, July 2020.
J. C. Kim, D. S. Pae, and M. T. Lim, “Obstacle avoidance path planning based on output constrained model predictive control,” International Journal of Control, Automation, and Systems, vol. 17, no. 11, pp. 2850–2861, November 2019.
Z. Yan, X. Le, and J. Wang, “Tube-based robust model predictive control of nonlinear systems via collective neurodynamic optimization,” IEEE Transactions on Industrial Electronics, vol. 63, no. 7, pp. 4377–4386, July 2016.
E. Kim, J. Kim, and M. Sunwoo, “Model predictive control strategy for smooth path tracking of autonomous vehicles with steering actuator dynamics,” International Journal of Automotive Technology, vol. 15, no.7, pp. 1155–1164, November 2014.
Z. Wang, W. Deng, S. Zhang, and J. Shi, “Vehicle automatic lane changing based on model predictive control,” SAE International Journal of Passenger Cars-Electronic and Electrical Systems, vol. 9, no. 1, pp. 231–236, May 2016.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work is supported by the National Natural Science Foundation of China (51975109), the Fundamental Research Funds for the Central Universities (N2103018), and the Joint Project of Nature Science Foundation of Liaoning Province of China (2021-KF-11-02).
Zhongchao Liang received his M.S. and Ph.D. degrees in mechanical engineering from Harbin Institute of Technology, China, in 2011 and 2015, respectively. From 2019 to 2020, he was an academic visitor with the Department of Electrical and Electronic Engineering, the University of Manchester, UK. He is currently an Associate Professor with School of Mechanical Engineering and Automation, Northeastern University, China. His research interests include intelligent vehicle and mobile robots.
Yidi Chen received her B.E. degree in mechanical design manufacture and automation from Shenyang University of Technology, China. She is currently pursuing an M.Eng. degree in mechanical engineering and automation, Northeastern University, China. Her research interests include vehicle system dynamics and control, motion control, and path planning of autonomous vehicles.
Jing Zhao got his Ph.D. degree in electromechanical engineering, University of Macau. He is currently working with the School of Mechanical Engineering and Automation, Northeastern University, China. His research interests include vehicle dynamics and control, mechanism and machine theory, fluid mechanics, and finite element analysis.
Rights and permissions
About this article

Cite this article
Liang, Z., Chen, Y. & Zhao, J. Real-time Parameter Updating and Path-following Control for Autonomous Vehicles on Slope Roads. Int. J. Control Autom. Syst. 20, 2178–2190 (2022). https://doi.org/10.1007/s12555-021-0269-8
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12555-021-0269-8