
Abstract
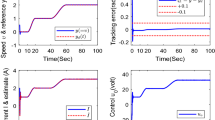
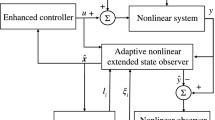
This paper investigates the global robust output tracking control problem via output feedback for a class of nonlinear uncertain systems with the integral input-to-state stable (iISS) dynamic uncertainties. By performing the coordinates transformation and employing an extended state observer (ESO), it can be seen that the robust setpoint tracking control is well solved. The proposed control strategy simplifies the control design procedure. This control scheme finds its application in the mass-spring mechanical system. It is shown that the asymptotic tracking control for any desired displacement can be achieved in the mass-spring mechanical system in the case of unknown parameters. The simulation results demonstrate that the proposed control scheme has a better tracking performance. This verifies the effectiveness of the developed method.
Similar content being viewed by others

References
I. Karafyllis and Z. P. Jiang, Stability and Stabilisation of Nonlinear Systems, Springer-Verlag, London, 2011.
E. D. Sontag, “Smooth stabilization implies comprime factorization,” IEEE Trans. Autom. Control, vol. 34, no. 4, pp. 435–443, 1989.
D. Angeli, E. D. Sontag, and Y. Wang, “A characterization of integral input to state stability,” IEEE Trans. Autom. Control, vol. 45, no. 6, pp. 1082–1087, 2000.
Z. P. Jiang, I. Mareels, D. J. Hill, and J. Huang, “A unifying framework for global regulation via nonlinear output feedback from ISS to iISS,” IEEE Trans. Autom. Control, vol. 49, no. 4, pp. 49–562, 2004.
X. Yu, Y. Q. Wu, and X. J. Xie, “Reduced-order observerbased output feedback regulation for a class of nonlinear systems with iISS inverse dynamics,” Int. J. Control, vol. 85, no. 12, pp. 1942–1951, 2012. [click]
D. B. Xu, J. Huang, and Z. P. Jiang, “Global adaptive output regulation for a class of nonlinear systems with iISS inverse dynamics using output feedback,” Automatica, vol. 49, no. 7, pp. 2184–2191, 2013. [click]
Y. Q. Wu, J. B. Yu, and Y. Zhao, “Further results on global asymptotic regulation control for a class of nonlinear systems with iISS inverse dynamics,” IEEE Trans. Autom. Control, vol. 56, no. 4, pp. 941–946, 2011. [click]
X. M. Sun and W. Wang, “Integral input-to-state stability for hybrid delayed systems with unstable continuous dynamics,” Automatica, vol. 48, no. 9, pp. 2359–2364, 2012. [click]
S. H. Ding, J. D. Wang, and W. X. Zheng, “Secondorder sliding mode control for nonlinear uncertain systems bounded by positive functions,” IEEE Trans. Ind. Electron., vol. 62, no. 9, pp. 5899–5909, 2015.
S. H. Ding, S. H. Li, and W. X. Zheng, “Nonsmooth stabilization of a class of nonlinear cascaded systems,” Automatica, vol. 48, no. 10, pp. 2597–2606, 2012. [click]
J. B. Yu, A. L. Shi and J. L. Yao, “Global asymptotic regulation control by output feedback for a class of nonlinear systems,” Proc. of the 34th Chinese Control Conf., pp. 895–900, 2015.
R. Freeman and P. V. Kokotović, Robust Nonlinear Control Design, Birkhäuser, Boston, 1996.
Z. P. Jiang and I. Mareels, “Robust nonlinear integral control,” IEEE Trans. Autom. Control, vol. 46, no. 8, pp. 1336–1342, 2001. [click]
J. B. Yu and Y. Q. Wu, “Global set-point tracking control for a class of nonlinear systems and its application in continuously stirred tank reactor systems,” IET Control Theory Appl., vol. 6, no. 12, pp. 1965–1971, 2012. [click]
J. B. Yu, J. Z. Wang, C. X. Zhang, and Y. Q. Wu, “Output feedback regulation control for a class of uncertain nonlinear systems,” ASME J. Dyn. Syst. Meas. Control, vol. 137, no. 4, pp. 041019-1-5, 2015. [click]
K. Dupree, C. H. Liang, G. Hu, and W. E. Dixon, “Adaptive Lyapunov-based control of a robot and mass-spring system undergoing an impact collision,” IEEE Trans. on Systems, Man, and Cybernetics, Part B: Cybernetics, vol. 38, no. 4, pp. 1050–1061, 2008. [click]
H. Y. Li, Y. N. Peng, and P. Shi, “Switched fuzzy output feedback control and its application to Mass-springdamping system,” IEEE Trans. Fuzzy Systems, vol. 24, no. 6, pp. 1259–1269, 2016.
M. Krstić, I. Kanellakopoulos, and P. V. Kokotović, Nonlinear and Adaptive Control Design, Wiley, New York, 1995.
Z. P. Jiang and D. J. Hill, “A robust adaptive backstepping scheme for nonlinear systems with unmodeled dynamics,” IEEE Trans. Autom. Control, vol. 44, no. 9, pp. 1705–1711, 1999. [click]
J. Y. Yao, Z. X. Jiao, and D. W. Ma, “Extended-stateobserver-based output feedback nonlinear robust control of hydraulic systems with Backstepping,” IEEE Trans. Ind. Electron., vol. 61, no. 11, pp. 6285–6293, 2014. [click]
J. Y. Yao, Z. X. Jiao, and D. W. Ma, “Adaptive robust control of DC motors with extended state observer,” IEEE Trans. Ind. Electron., vol. 61, no. 7, pp. 3630–3637, 2014. [click]
J. Y. Yao, Z. X. Jiao, and D. W. Ma, “Output feedback robust control of direct current motors with nonlinear friction compensation and disturbance rejection,” ASME J. Dyn. Syst. Meas. Control, vol. 137, no. 4, pp. 041004, 2015. [click]
H. L. Xing, D. H. Li, J. Li, and C. H. Zhang, “Linear extended state observer based sliding mode disturbance decoupling control for nonlinear multivariable systems with uncertainty,” Int J Contr Autom Syst, vol. 14, no. 4, pp. 1–10, 2016.
W. Y. Yu, S. T. Liu, and F. F. Zhang, “Global output feedback regulation of uncertain nonlinear systems with unknown time delay,” Int J Contr Autom Syst, vol. 13, no. 2, pp. 1–9, 2015.
Author information
Authors and Affiliations
Corresponding author
Additional information
Recommended by Associate Editor Do Wan Kim under the direction of Editor Jessie (Ju H.) Park. This work was supported by the Outstanding Middle-age and Young Scientist Award Foundation of Shandong Province under grant BS2015DX008, the National Natural Science Foundation of China under grant 61304008, 61471409, 61403237, and the Natural Science Foundation of Shandong Province of China under grant ZR2013FQ033. The authors would like to thank the anonymous reviewers for their valuable and constructive comments for improving the quality of this work. The authors also express their gratitude to associate Prof. Lei Yu for helpful discussions on PID control in Soochow University, China.
Yan Zhao received the B.S. and M.S. degrees in Applied Mathematics and Control Theory from Qufu Normal University, and the Ph.D. degree in Control Science and Engineering from Southeast University, in 2007, 2010 and 2014, respectively. She is currently a Lecturer in School of Science, Shandong Jianzhu University. Her research interests include stochastic nonholonomic systems control and nonlinear systems control.
Jiang-Bo Yu received the B.S. and M.S. degrees in Applied Mathematics and Control Theory from Qufu Normal University, and the Ph.D. degree in Control Science and Engineering from Southeast University, in 2006, 2009 and 2012, respectively. He is currently an Associate Professor in School of Science, Shandong Jianzhu University. His research interests include robust adaptive control and nonlinear systems control.
Jie Tian received her B.S., M.S. and Ph.D. degrees in Applied Mathematics from Qufu Normal University, in 2002, 2005 and 2008, respectively. She is currently an Associate Professor in School of Science, Shandong Jianzhu University. Her research interests include stochastic nonlinear control.
Rights and permissions
About this article

Cite this article
Zhao, Y., Yu, JB. & Tian, J. Robust output tracking control for a class of uncertain nonlinear systems using extended state observer. Int. J. Control Autom. Syst. 15, 1227–1235 (2017). https://doi.org/10.1007/s12555-016-0078-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12555-016-0078-7