
Abstract
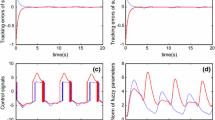
This article presents an indirect adaptive fuzzy control scheme for a class of nonlinear uncertain nonaffine systems with unknown control directions. The nonlinear nonaffine system is first transformed into an affine form by using a Taylor series expansion, and then fuzzy systems are employed to approximate the equivalent affine system’s unknown nonlinearities. By modifying the estimated input control gain and using a novel smooth robust control term, a stable well-defined adaptive controller is proposed. Simulation results are provided to illustrate the efficiency of the proposed scheme.
Similar content being viewed by others

References
L. X. Wang, Adaptive Fuzzy Systems and Control: Design and Stability Analysis, Prentice-Hall, Englewood Clifs, NJ, 1994.
J. T. Spooner and K. M. Passino, “Stable adaptive control using fuzzy systems and neural networks,” IEEE Trans. Fuzzy Systems, vol. 4, pp. 339–359, 1996.
J.-H. Park, S.-H. Kim, and C.-J. Moon, “Adaptive fuzzy controller for the nonlinear system with unknown sign of the input gain,” International Journal of Control, Automation, and Systems, vol. 4, no. 2, pp. 178–186, 2006.
S. Labiod, M. S. Boucherit, and T. M. Guerra, “Adaptive fuzzy control of a class of MIMO nonlinear systems,” Fuzzy Sets and Systems, vol. 151, no. 1, pp. 59–77, 2005.
S. S. Ge and J. Zhang, “Neural-network control of nonaffine nonlinear system with zero dynamics by state and output feedback,” IEEE Trans. Neural Networks, vol. 14, no. 4, pp. 900–918, 2003.
J.-H. Park, G.-T. Park, S.-H. Kim, and C.-J. Moon, “Direct adaptive self-structuring fuzzy controller for nonaffine nonlinear system,” Fuzzy Sets and Syst, vol. 153, no. 3, pp. 429–445, 2005.
N. Essounbouli and A. Hamzaoui, “Direct and indirect robust adaptive fuzzy controllers for a class of nonlinear systems,” International Journal of Control, Automation, and Systems, vol. 4, no. 2, pp. 146–154, 2006.
S. Labiod and T. M. Guerra, “Adaptive fuzzy control of a class of SISO nonaffine nonlinear systems,” Fuzzy Sets and Systems, vol. 158, no. 10, pp. 1126–1137, 2007.
R. Boukezzoula, S. Galichet, and L. Foulloy, “Fuzzy adaptive control for non-affine systems,” Proc. IEEE Int. Conf. Fuzzy Syst., pp. 543–548, 2003.
J. Wang, S. S. Ge, and T. H. Lee, “Adaptive fuzzy sliding mode control of a class of nonlinear systems,” Proc. the 3rd Asian Control Conf., pp. 599–604, 2000.
J.-H. Park and G.-T. Park, “Robust adaptive fuzzy controller for non-affine nonlinear systems with dynamic rule activation,” International Journal of Robust and Nonlinear Control, vol. 13, pp. 117–139, 2003.
T. P. Zhang and S. S. Ge, “Adaptive neural control of MIMO nonlinear state time-varying delay systems with unknown dead-zones and gain signs,” Automatica, vol. 43, pp. 1021–1033, 2007.
J. Kaloust and Z. Qu, “Continuous robust control design for nonlinear uncertain systems without a priori knowledge of control direction,” IEEE Trans. Aut.. Contr., vol. 40, pp. 276–282, 1995.
B. Brogliato and R. Lozano, “Adaptive control of first-order nonlinear systems with reduced knowledge of the plant parameters,” IEEE Trans. on Aut. Control, vol. 39, pp. 1764–1768, 1994.
W. H. Dong, X. X. Sun, and Y. Lin, “Variable structure model reference adaptive control with unknown high frequency gain sign,” Acta Automatica Sinica, vol. 33, pp. 404–408, 2007.
Author information
Authors and Affiliations
Corresponding author
Additional information
Recommended by Editorial Board member Euntai Kim under the direction of Editor Young-Hoon Joo.
Salim Labiod is currently an Associate Professor at the University of Jijel, Algeria. He received his Magister and Ph.D. degrees in Control Engineering from National Polytechnic School of Algiers in 1998 and 2005, respectively. His research interests include nonlinear control, adaptive control, and fuzzy control.
Thierry Marie Guerra is currently a Professor at the University of Valenciennes et du Hainaut-Cambrésis (UVHC), France. He received his Ph.D. degree in Automatic Control from the UVHC in 1991 and the HDR in 1999. His research interests include nonlinear control, fuzzy control, and optimal control.
Rights and permissions
About this article
Cite this article
Labiod, S., Guerra, T.M. Indirect adaptive fuzzy control for a class of nonaffine nonlinear systems with unknown control directions. Int. J. Control Autom. Syst. 8, 903–907 (2010). https://doi.org/10.1007/s12555-010-0425-z
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12555-010-0425-z