
Abstract
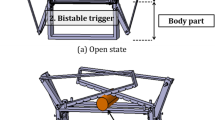
Drones are used for various purposes including surveillance and surveying. A drone usually hovers in place during its mission, consuming a large amount of energy to maintain its position. This can be fatal, particularly for small-to-medium-sized drones with relatively short flight time capability. If drones could settle on other structures while performing their missions, this would save a significant amount of energy. To this end, drones can be equipped with the ability to hang onto or from various structures using a gripper device. However, urban areas have many structures with vertical planes such as building walls and streetlights, making it difficult for the drone to settle. Therefore, a method of settling on the walls of structures, as opposed to hanging, would be preferable in this case. Further, for a gripper to settle not only on a plane but also on curved surfaces, the angle of the gripper must be adjustable to fit the shape of the structure. In this work, a gripper was designed to have a center arm and a sub-arm. To increase stability further during settlement, the sub-arm was composed of a rigid body and a flexible pad. Sets of experiments were conducted to optimize the attachment pad type and the shape of the flexible pad. Further, a supporting beam was incorporated into the gripper to prevent the drone from sagging under its own weight. By utilizing the impact force generated upon colliding with the structure, the gripper designed in this research could stably settle over a wide range of flight velocities. The sub-arm with the flexible pad could adjust the gripping angle, and the gripper could cope with various surfaces with curvatures larger than 70 mm.













Similar content being viewed by others

References
Gallacher, D. (2016). Drone applications for environmental management in urban spaces: A review. International Journal of Sustainable Land Use and Urban Planning, 3(4), 1–14. https://doi.org/10.24102/ijslup.v3i4.738
Mishra, B., Garg, D., Narang, P., & Mishra, V. (2020). Drone-surveillance for search and rescue in natural disaster. Computer Communications, 156, 1–10. https://doi.org/10.1016/j.comcom.2020.03.012
Yi, W., & Sutrisna, M. (2020). Drone scheduling for construction site surveillance. Computer-Aided Civil and Infrastructure Engineering, 36(1), 3–13. https://doi.org/10.1111/mice.12593
Sehrawat, A., Choudhury, T. & Raj, G. (2017). Surveillance drone for disaster management and military security. In 2017 International Conference on Computing, Communication and Automation (ICCCA), pp. 470–475. https://doi.org/10.1109/CCAA.2017.8229846.
Joo, M., Yoon, J., Junejo, A. R., et al. (2022). Optimization: Drone-Operated Metal Detection Based on Machine Learning and PID Controller. International Journal of Precision Engineering and Manufacturing, 23, 503–515. https://doi.org/10.1007/s12541-022-00639-w
Levy, J. S., & Johnson, J. T. E. (2021). Remote soil moisture measurement from drone-borne reflectance spectroscopy: Applications to hydroperiod measurement in desert playas. Remote Sensing, 13(5), 1035. https://doi.org/10.3390/rs13051035
Almheiri, Z., Aleid, R., & Dol, S. S. (2021). Design of fixed-wing and multi-copter hybrid drone system for human body temperature measurement during COVID-19 pandemic. WSEAS Transactions on Systems, 20(1), 31–39. https://doi.org/10.37394/23202.2021.20.5
Bartholmal M. & Neumann, P. (2010). Micro-drone for gas measurement in hazardous scenarios via remote sensing. 6th WSEAS International Conference on Remote Sensing, Iwate Prefectural University, pp. 149–152.
Kannan, R. J., & Yadav, K. P. (2021). Drone routing techniques for surveying in urban areas. Review of International Geographical Education Online, 11(5), 4157–4167.
Kirschstein, T. (2020). Comparison of energy demands of drone-based and ground-based parcel delivery services. Transportation Research Part D: Transport and Environment, 78, 102209. https://doi.org/10.1016/j.trd.2019.102209
Nurrohaman, M. F., Titalim, B. A., Utama, T. H., & Adiprawita, W. (2019). Design and implementation of on-board hybrid generator for rotary wing drone. International Conference on Electrical Engineering and Informatics (ICEEI), 2019, 310–314. https://doi.org/10.1109/ICEEI47359.2019.8988811
Wopereis, H. W., van der Molen, T. D., Post, T. H., Stramigioli, S. & Fumagalli, M. (2016). Mechanism or perching on smooth surfaces using aerial impacts. 2016 IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), pp. 154–159. https://doi.org/10.1109/SSRR.2016.7784292.
Anderson, M. L., Perry, C. J., Hua, B. M., Olsen, D. S., Parcus, J. R., Pederson, K. M. & Jensen, D. D. (2009). The sticky-pad plane and other innovative concepts for perching UAVs. In 47th AIAA Aerospace Sciences Meeting Including The New Horizons Forum and Aerospace Exposition, pp. 1–11. https://doi.org/10.2514/6.2009-40.
Roberts, J. F., Zufferey, J. C., & Floreano, D. (2008). Energy management for indoor hovering robots. IEEE/RSJ International Conference on Intelligent Robots and Systems. https://doi.org/10.1109/IROS.2008.4650856
Myeong, W., & Myung, H. (2016). Development of wall-climbing drone capable of vertical soft landing using a tilt-rotor mechanism. IEEE Access, 7, 4868–4879. https://doi.org/10.1109/ACCESS.2018.2889686
Bae, S. Y., Kim, S. H., Choi, H. S., Cho, C. Y., Lee, D. H., & Kim, D. H. (2019). Design and controller development of drone capable of landing, takeoff, and travelling on a vertical wall. Journal of Institute of Control, Robotics and Systems, 25(12), 1077–1084. https://doi.org/10.5302/J.ICROS.2019.19.0177
Zhang, J., Campbell, J. F., Sweeney, D. C., & Hupman, A. C. (2021). Energy consumption models for delivery drones: A comparison and assessment. Transportation Research Part D: Transport and Environment, 90, 102668. https://doi.org/10.1016/j.trd.2020.102668
Lyu, Z., & Xu, Q. (2022). Design and testing of a new piezoelectric-actuated symmetric compliant microgripper. Actuators, 11(3), 77. https://doi.org/10.3390/act11030077
Mehrabi, H., Hamedi, M., & Aminzahed, I. (2020). A novel design and fabrication of a micro-gripper for manipulation of micro-scale parts actuated by a bending piezoelectric. Microsystem Technologies, 26, 1563–1571. https://doi.org/10.1007/s00542-019-04696-6
Seethaler, R., Mansour, S. Z., Ruppert, M. G., & Fleming, A. J. (2021). Position and force sensing using strain gauges integrated into piezoelectric bender electrodes. Sensors and Actuators A: Physical, 321, 112416. https://doi.org/10.1016/j.sna.2020.112416
Kim, S.E., Lee, E.S. & Yoon, H.S. (2021). Development of settlement grippers to extend drones’ flight time, available on YouTube, posted: November 25, 2021, accessed: August 24, 2022, https://youtu.be/PWklIvQ3ANc.
Acknowledgements
This work was supported by the National Research Foundation of Korea (NRF) grant funded by the Korean government (Ministry of Science and ICT and Ministry of Education) (No. NRF-2022R1F1A1063896 and No. 5199990714521) and by 2020 Korea Aerospace University Faculty Research Grant (2020-2069-0001).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Competing interest
The authors declare that they have no known competing financial interests of personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Kim, S.E., Yoon, HS. Development of a Universal-Purpose Settlement Gripper Using a Flexible Sub-arm and Triggering Mechanism. Int. J. Precis. Eng. Manuf. 23, 1431–1441 (2022). https://doi.org/10.1007/s12541-022-00714-2
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12541-022-00714-2