
Abstract
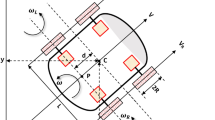
A floor-mopping robot with quadruple mopping pads was designed and implemented in this research. The proposed robot does not require driving mechanisms, such as wheels to obtain driving forces. Instead, the friction between the floor and the mopping pads was utilized to generate the driving force. The direction of the friction force can be controlled by adjusting the rotation direction of the pad, which enables the robot to generate the omnidirectional motion. In this work, a dynamic model of a mopping pad using a sponge was derived to design a new type of mopping robot with quadruple pads. The relationship between the driving force for the robot and control variable of the robot was then achieved to control the movement of the floor-mopping robot in a desired direction. A prototype mopping robot with the proposed scheme was built and tested to verify the dynamic model. The proposed robot presents a new structure for floor cleaning, and proves that it can effectively clean while operating with omnidirectional motion.




















Similar content being viewed by others

References
Prassler, E., Ritter, A., Schaeffer, C., & Fiorini, P. (2000). A short history of cleaning robots. Autonomous Robots,9(3), 211–226.
Hong, Y., Sun, R., Lin, R., Yu, S., & Sun, L. (2014). Mopping module design and experiments of a multifunction floor cleaning robot. In Proceedings of the 11th world congress on intelligent control and automation (pp. 5097–5102).
Kongsin, W., & Kirita, S. (2012). Navigation algorithm for floor-mopping robot. Procedia Engineering,31, 874–878.
Palacin, J., Salse, J. A., Valgañón, I., & Clua, X. (2004). Building a mobile robot for a floor-cleaning operation in domestic environments. IEEE Transactions on Instrumentation and Measurement,53(5), 1418–1424.
Prabakaran, V., Elara, M. R., Pathmakumar, T., & Nansai, S. (2018). Floor cleaning robot with reconfigurable mechanism. Automation in Construction,91, 155–165.
Gao, X., Li, K., Wang, Y., Men, G., Zhou, D., & Kikuchi, K. (2007). A floor cleaning robot using Swedish wheels. In IEEE international conference on robotics and biomimetics (pp. 2069–2073).
Parween, R., Shi, Y., Parasuraman, K., Vengadesh, A., Sivanantham, V., Ghanta, S., et al. (2019). Modeling and analysis of Honeycomb—a polyhex inspired reconfigurable tiling robot. Energies,12(13), 2517–2535.
Shin, D. H., & Kim, H. J. (2000). Twin brush floor polishing robot. Journal of Intelligent and Robotic Systems,29(3), 295–308.
Kim, K., Park, B., & Kim, H. (2008). Force reflecting remote robotic mopping system. In International conference on control, automation and systems (pp. 2091–2094).
Shin, D. H., Kim, H. J., Lee, H. G., & Kim, H. S. (1998). Omni-directional self-propulsive trowelling robot. In IEEE international conference on robotics and automation (pp. 2689–2696).
Furiya, H., & Kiyohiro, N. (1995). Floor polishing robot driven by self propulsive force. Journal of the Robotics Society of Japan,13(6), 854–859.
Zhang, X. G., Zhang, W., Li, H., Liu, M. Q., & Lyu, S. (2018). Level set based path planning using a novel path optimization algorithm for robots. International Journal of Precision Engineering and Manufacturing,19(9), 1331–1338.
Fuse, Y., Furuya, M., Nishimura, M., Yoshimura, C., Watanabe, H., Tanzawa, T., et al. (2011). Indoor localization using infrared global vision system and LRF for twin brushes floor polishing robots. In IEEE international conference on mechatronics and automation (pp. 1757–1762).
Byun, K. S., & Song, J. B. (2003). Design and construction of continuous alternate wheels for an omnidirectional mobile robot. Journal of Robotic Systems,20(9), 569–579.
Dickerson, S. L., & Lapin, B. D. (1991). Control of an omni-directional robotic vehicle with Mecanum wheels. In National telesystems conference proceedings (pp. 323–328).
Chu, B. (2017). Position compensation algorithm for omnidirectional mobile robots and its experimental evaluation. International Journal of Precision Engineering and Manufacturing,18(12), 1755–1762.
Chen, C. H., & Song, K. T. (2005). Complete coverage motion control of a cleaning robot using infrared sensors. In IEEE international conference on mechatronics (pp. 543–548).
Lang, S. Y., & Chee, B. Y. (1998). Coordination of behaviours for mobile robot floor cleaning. In IEEE/RSJ international conference on intelligent robots and systems (pp. 1236–1241).
Hofner, C., & Schmidt, G. (1995). Path planning and guidance techniques for an autonomous mobile cleaning robot. Robotics and Autonomous Systems,14(2–3), 199–212.
Hasan, K. M., & Reza, K. J. (2014). Path planning algorithm development for autonomous vacuum cleaner robots. In IEEE international conference on informatics, electronics and vision (pp. 1–6).
Yang, T., Sun, N., Chen, H., & Fang, Y. (2019). Neural network-based adaptive antiswing control of an underactuated ship-mounted crane with roll motions and input dead zones. IEEE Transactions on Neural Networks and Learning System, 1–14.
Duc, T. M., Hoa, N. V., & Dao, T. P. (2018). Adaptive fuzzy fractional-order nonsingular terminal sliding mode control for a class of second-order nonlinear systems. Journal of Computational and Nonlinear Dynamics,13(3), 031004.
Sun, N., Liang, D. K., Wu, Y. M., Chen, Y. H., Qin, Y. D., & Fang, Y. C. (2019). Adaptive control for pneumatic artificial muscle systems with parametric uncertainties and unidirectional input constraints. IEEE Transactions on Industrial Informatics, 1–9.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Park, HY., Lee, J. Quadruple-Pad Floor-Mopping Robot. Int. J. Precis. Eng. Manuf. 21, 427–436 (2020). https://doi.org/10.1007/s12541-019-00282-y
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12541-019-00282-y