
Abstract
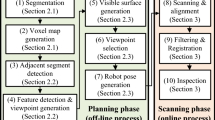
In 3D robotic inspection systems, view planning and path planning are important to minimize the operation time of the system. In this study, an automated inspection system is proposed that consists of a structured light scanner, a collaborative robot, and a rotary table. In addition, a rescan strategy algorithm is proposed that can minimize the operation time of the system and enhance the reliability of the inspection task. This algorithm uses a small number of viewpoints for view planning by selecting an area to be rescanned. At the same time, path planning with the rotation and alignment of viewpoints using a rotary table make it possible to reduce the scanning time. Experimental results on various objects have verified that the proposed method can be applied to the 3D quality inspection task with a reasonable operation time.











Similar content being viewed by others


References
Minetola, P. (2012). The importance of a correct alignment in contactless inspection of additive manufactured parts. International Journal of Precision Engineering and Manufacturing, 13(2), 211–218.
Nguyen, H.-C., & Lee, B.-R. (2014). Laser-vision-based quality inspection system for small-bead laser welding. International Journal of Precision Engineering and Manufacturing, 15(3), 415–423.
Chen, S., Li, Y., & Kwok, N. M. (2011). Active vision in robotic systems: A survey of recent developments. The International Journal of Robotics Research (IJRR), 30(11), 1343–1377.
Scott, W. R., Roth, G., & Rivest, J.-F. (2003). View planning for automated three-dimensional object reconstruction and inspection. Journal of ACM Computing Surveys (CSUR), 35(1), 64–96.
Byun, S., Jung, K., Im, S., & Chang, M. (2017). Registration of 3D scan data using image reprojection. International Journal of Precision Engineering and Manufacturing, 18(9), 1221–1229.
Fang, W., Zheng, L., He, B., & Wang, Q. (2017). Automatic 3D model acquisition for unknown objects based on hybrid vision technology. International Journal of Precision Engineering and Manufacturing, 18(3), 275–284.
Tarabanis, K. A., Tsai, R. Y., & Allen, P. K. (1995). The MVP sensor planning system for robotic vision tasks. IEEE Robotics and Automation Society, 11(1), 72–85.
Prieto, F., Lepage, R., Boulanger, P., & Redarce, T. (2003). A CAD-based 3D Data Acquisition Strategy for Inspection. Machine Vision and Appl., 15(2), 76–91.
Fan, X., Zhang, L., Brown, B., & Rusinkiewicz, S. (2016). Automated view and path planning for scalable multi-object 3D scanning. ACM Transactions on Graphics, 35(6), 239.
Chen, S. Y., & Li, Y. F. (2004). Automatic sensor placement for model-based robot vision. IEEE Transactions on Systems, Automatic Sensor Placement for Model-Based Robot Vision, 34(1), 393–408.
Yang, C. C., & Ciarallo, F. W. (2001). Optimized sensor placement for active visual inspection. Journal of Intelligent and Robotic Systems, 18(1), 1–15.
Jing, W., Polden, J., Tao, P. Y., Goh, C. F., Lin, W., & Shimada, K. (2007). Model-based coverage motion planning for industrial 3D shape inspection applications. In IEEE Conference on Autonomous Science Engineering (CASE), pp. 1293–1300.
Olague, G., & Mohr, R. (2002). Optimal camera placement for accurate reconstruction. Pattern Recognition, 35(4), 927–944.
Christofides, N. (1976). Worst-case analysis of a new heuristic for the travelling salesman problem, Technical Report 388, Graduate School of Industrial Administration, Carnegie Mellon University, 1976.
Shi, Q., Xi, N., & Zhang, C. (2010). Develop a robot-aided area sensing system for 3D shape inspection. Journal of Materials Science & Technology, 132(1), 2010.
Langming, Z., Xiaohu, Z., & Banglei, G. (2014). A flexible method for multi-view point clouds alignment of small-size object. Measurement, 58, 115–129.
Callieri, M., Fasano, A., Impoco, G., Cignoni, P., Scopigno, R., Rarrini, G. and Biagini, G. (2004). RoboScan: An automatic system for accurate and unattended 3D scanning. In International symposium on 3D data processing, visualization and transmission.
Pito, R. (1999). A solution to the next best view problem for automated surface acquisition. IEEE Transaction on Pattern Analysis and Machine Intelligence, 21(10), 1016–1030.
Besl, P. J., & Mckay, N. D. (1992). A method for registration of 3-D shape. IEEE Transaction on Pattern Analysis and Machine Intelligence, 14(2), 239–256.
Lu, F., & Milios, E. (1997). Globally consistent range scan alignment for environment mapping. Autonomous Robots, 4(4), 333–349.
Zhang, S., & Huang, P. (2006). Novel method for structured light system calibration. Optical Engineering, 45(8), 083601.
Acknowledgement
This work was supported by IITP Grant funded by the Korea Government MSIT (No. 2018-0-00622).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Kwon, H., Na, M. & Song, JB. Rescan Strategy for Time Efficient View and Path Planning in Automated Inspection System. Int. J. Precis. Eng. Manuf. 20, 1747–1756 (2019). https://doi.org/10.1007/s12541-019-00186-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12541-019-00186-x