
Abstract
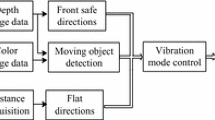
In this paper, we present a new robotic system to assist visually impaired people in unknown indoor and outdoor environments. The robotic system, which is equipped with a visual sensor, laser range finders, speaker, gives visually impaired people information about the environment around them. The laser data are analyzed using the clustering technique, making it possible to detect obstacles, steps and stairs. By using the visual sensor, the system is able to distinguish between objects and humans. The PC analyses the sensors data and send information to the visually impaired people by natural language or beep signal. The usefulness of the proposed system is examined experimentally.
Similar content being viewed by others

References
Mori H, Kotani S (1998) Robotic travel aid for the blind: HARUNOBU-6. In: Second European conference on disability, virtual reality, and assistive technology
Brusnighan DA et al (1989) Orientation aid implementing the global positioning system. In: 15th IEEE Annual Northeast Bioengineering Conference, pp 33–34
Loomis J et al (2001) GPS-based navigation systems for the visually impaired. In: Fundamentals of wearable computers and augmented reality, pp 429–446
Makino H et al (1997) Development of navigation system for the blind using GPS and mobile phone combination. In: IEEE int conf of engineering in medicine and biology, vol 2, pp 506–507
Ueda T, Kawata H, Tomizawa T, Ohya A, Yuta S (2006) Visual information assist system using 3D SOKUIKI sensor for blind people—System concept and object detecting experiments. In: IECON’06 the 32nd annual conference of the IEEE industrial electronics society proceedings, Nov. 2006, pp 3058–3063
Helal A et al (2001) Dristi: an integrated navigation system for the visually impaired. In: Int IEEE symposium on wearable computers, pp 149–156
Hesch JA, Roumeliotis SI (2007) An indoor localization aid for the visually impaired. In: IEEE int conf on robotics and automation, Roma, Italy, April 10–14, pp 3545–3551
Kulyukin V, Gharpure C, Nicholson J, Pavithran S (2004) RFID in robot assisted indoor navigation for the visually impaired. In: IEEE int conf on intelligent robots and systems, Sandaï, Japan, Sept. 28 – Oct. 2, vol 2, pp 1979–1984
Na J (2006) The blind interactive guide system using RFID-based indoor positioning system. In: 10th int conf on computers helping people with special needs, Linz, Austria, July 11–13. Lecture notes in computer science, vol 4061, Springer, Berlin, pp 1298–1305
Broadbent E, Stafford R, MacDonald B (2009) Acceptance of healthcare robots for the older population: review and future directions, Int J Soc Robot 1(4):319–330
Salvini P, Laschi C, Dario P (2010) Design for acceptability: improving robots’ coexistence in human society. Int J Soc Robot 2(4):451–460
Ueda T, Kawata H, Tomizawa T, Ohya A., Yuta S (2006) Mobile SOKUIKI sensor system—accurate range data mapping system with sensor motion. In: Proceedings of the 2006 international conference on autonomous robots and agents
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Capi, G., Toda, H. Development of a New Robotic System for Assisting Visually Impaired People. Int J of Soc Robotics 4 (Suppl 1), 33–38 (2012). https://doi.org/10.1007/s12369-011-0103-1
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12369-011-0103-1