
Abstract
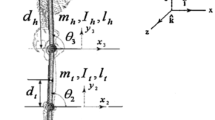
The following research approximated how the central nervous system of Paralympic wheelchair athletes resolve kinematic redundancies during upper-limb movements. A multibody biomechanical model of a tetraplegic Paralympic athlete was developed using subject-specific body segment parameters. The angular joint kinematics throughout a specified Paralympic sport movement (i.e., wheelchair curling) were experimentally measured using inertial measurement units. The motor control system of the Paralympian was mathematically modelled and simulated using forward dynamics optimization. The predicted kinematics from different optimization objective functions (i.e., minimizing resultant joint moments, mechanical joint power, and angular joint velocities and accelerations) were compared with those experimentally measured throughout the wheelchair curling movement. Of the optimization objective functions under consideration, minimizing angular joint accelerations produced the most accurate predictions of the kinematic trajectories (i.e., characterized with the lowest overall root mean square deviations) and the shortest optimization computation time. The implications of these control findings are discussed with regards to optimal wheelchair design through predictive dynamic simulations.




Similar content being viewed by others

References
Zatsiorsky VM (1998) Kinematics of human motion. Human Kinetics, Champaign
Bernstein N (1967) The co-ordination and regulation of movements. Pergamon Press, New York
Kirshblum SC et al (2011) International standards for neurological classification of spinal cord injury (revised 2011). J Spinal Cord Med 34:535–546. https://doi.org/10.1179/204577211X13207446293695
Prilutsky B et al (2011) Motor control and motor redundancy in the upper extremity: implications for neurorehabilitation. Top Spinal Cord Injury Rehabil 17:7–15. https://doi.org/10.1310/sci1701-07
Mehrabi N, Razavian RS, McPhee J (2015) A physics-based musculoskeletal driver model to study steering tasks. ASME J Comput Nonlinear Dyn. https://doi.org/10.1115/1.4027333
Popovic D, Oguztoreli MN, Stein RB (1995) Optimal control for an above-knee prosthesis with two degrees of freedom. J Biomech 28:89–98. https://doi.org/10.1016/0021-9290(95)80010-7
Sha D, Thomas JS (2015) An optimisation-based model for full-body upright reaching movements. Comput Methods Biomech Biomed Eng 18:847–860. https://doi.org/10.1080/10255842.2013.850675
Shourijeh MS, McPhee J (2014) Forward dynamic optimization of human gait simulations: a global parameterization approach. ASME J Comput Nonlinear Dyn. https://doi.org/10.1115/1.4026266
Shourijeh MS, Mehrabi N, McPhee J (2017) Forward static optimization in dynamic simulation of human musculoskeletal systems: a proof-of-concept study. ASME J Comput Nonlinear Dyn. https://doi.org/10.1115/1.4036195
Shoushtari AL (2013) What strategy central nervous system uses to perform a movement balanced? Biomechatronical simulation of human lifting. Appl Bionics Biomech 10:113–124. https://doi.org/10.3233/ABB-130075
De Groote F, Kinney AL, Rao AV, Fregly BJ (2016) Evaluation of direct collocation optimal control problem formulations for solving the muscle redundancy problem. Ann Biomed Eng. https://doi.org/10.1007/s10439-016-1591-9
Lin YC, Pandy MG (2017) Three-dimensional data-tracking dynamic optimization simulations of human locomotion generated by direct collocation. J Biomech. https://doi.org/10.1016/j.jbiomech.2017.04.038
Porsa S, Lin YC, Pandy MG (2016) Direct methods for predicting movement biomechanics based upon optimal control theory with implementation in OpenSim. Ann Biomed Eng 44:2542–2557. https://doi.org/10.1007/s10439-015-1538-6
Razavian RS, Mehrabi N, McPhee J (2015) A model-based approach to predict muscle synergies using optimization: application to feedback control. Front Comput Neurosci. https://doi.org/10.3389/fncom.2015.00121
Mehrabi N, Razavian RS, Ghannadi B, McPhee J (2016) Predictive simulation of reaching moving targets using nonlinear model predictive control. Front Comput Neurosci. https://doi.org/10.3389/fncom.2016.00143
Roetenberg D (2006) Inertial and magnetic sensing of human motion. PhD Dissertation, University of Twente
Cloete T, Scheffer C (2010) Repeatability of an off-the-shelf, full body inertial motion capture system during clinical gait analysis. Annu Int Conf IEEE Eng Med Biol Soc. https://doi.org/10.1109/IEMBS.2010.5626196
Zhang JT, Novak AC, Brouwer B, Li Q (2013) Concurrent validation of Xsens MVN measurement of lower limb joint angular kinematics. Physiol Meas 34:63–69. https://doi.org/10.1088/0967-3334/34/8/N63
Laschowski B, McPhee J (2016) Body segment parameters of Paralympic athletes from dual-energy X-ray absorptiometry. Sports Eng 19:155–162. https://doi.org/10.1007/s12283-016-0200-3
Laschowski B, McPhee J (2016) Quantifying body segment parameters using dual-energy X-ray absorptiometry: a Paralympic wheelchair curler case report. Procedia Eng 147:163–167. https://doi.org/10.1016/j.proeng.2016.06.207
Maeno N (2014) Dynamics and curl ratio of a curling stone. Sports Eng 17:33–41. https://doi.org/10.1007/s12283-013-0129-8
Lebiedowska MK (2006) Dynamic properties of human limb segments. In: Karwowski W (ed) International encyclopaedia of ergonomics and human factors, 2nd edn. CRC Press, Boca Raton, pp 315–319
Rapoport S, Mizrahi J, Kimmel E, Verbitsky O, Isakov E (2003) Constant and variable stiffness and damping of the leg joints in human hopping. ASME J Biomech Eng 125:507–514. https://doi.org/10.1115/1.1590358
Laschowski B, Mehrabi N, McPhee J (2016) Inverse dynamics modelling of Paralympic wheelchair curling. J Appl Biomech 33:294–299. https://doi.org/10.1123/jab.2016-0143
Patterson MA, Rao AV (2012) GPOPS II: a MATLAB software for solving multiple-phase optimal control problems using hp-adaptive Gaussian quadrature collocation methods and sparse nonlinear programming. ACM Trans Math Softw 41:1–37. https://doi.org/10.1145/2558904
Ackermann M, Van Den Bogert AJ (2010) Optimality principles for model-based prediction of human gait. J Biomech 43:1055–1060. https://doi.org/10.1016/j.jbiomech.2009.12.012
Miller RH, Hamill J (2015) Optimal footfall patterns for cost minimization in running. J Biomech 48:2858–2864. https://doi.org/10.1016/j.jbiomech.2015.04.019
Hollerbach JM, Suh KC (1987) Redundancy resolution of manipulators through torque optimization. IEEE J Robotics Autom RA-3:308–316. https://doi.org/10.1109/jra.1987.1087111
Parnianpour A, Wang JL, Shirazi-Adl A, Khayatian B, Lafferriere G (1999) Computation method for simulation of trunk motion: towards a theoretical based quantitative assessment of trunk performance. Biomed Eng Appl Basis Commun 11:27–39
Biegler LT, Zavala VM (2008) Large-scale nonlinear programming using IPOPT: an integrating framework for enterprise-wide optimization. Comput Chem Eng 33:575–582. https://doi.org/10.1016/j.compchemeng.2008.08.006
Xiang Y, Arora JS, Abdel-Malek K (2010) Physics-based modeling and simulation of human walking: a review of optimization-based and other approaches. Struct Multidiscip Optim 42:1–23. https://doi.org/10.1007/s00158-010-0496-8
Haydon DS, Pinder RA, Grimshaw PN, Robertson WSP (2016) Elite wheelchair rugby: a quantitative analysis of chair configuration in Australia. Sports Eng 19:177–184. https://doi.org/10.1007/s12283-016-0203-0
Astier M, Weissland T, Vallier JM, Pradon D, Watelain E, Faupin A (2017) Effects of synchronous versus asynchronous push modes on performance and biomechanical parameters in elite wheelchair basketball. Sports Eng. https://doi.org/10.1007/s12283-017-0245-y
Acknowledgements
The authors thank the Paralympian for participating in this research. The authors also recognize the Canadian Sport Institute Ontario and Curling Canada for their support. This research was funded by Dr. John McPhee’s Tier I Canada Research Chair in Biomechatronic System Dynamics.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Rights and permissions
About this article

Cite this article
Laschowski, B., Mehrabi, N. & McPhee, J. Optimization-based motor control of a Paralympic wheelchair athlete. Sports Eng 21, 207–215 (2018). https://doi.org/10.1007/s12283-018-0265-2
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12283-018-0265-2