
Abstract
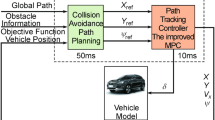
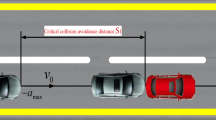
A hierarchical vehicle collision avoidance control method based on model predictive control is presented in this study. In the upper level of the controller, a spatial-based two-degree-of-freedom vehicle model is used for dynamic path planning to decrease the computational burden of the algorithm. Obstacles and road boundaries are translated into spatial-based constraints on system states. An objective function that considers tire adhesion margin is introduced to the path tracking controller to enhance vehicle safety. Meanwhile, the dynamic constraints of vehicle lateral acceleration, sideslip, and tire slip angles are designed in accordance with the tire-road adhesion coefficient. A time-based nonlinear model predictive controller is also designed and compared with the proposed method to verify the effectiveness and superiority of the latter. Theoretical analyses and simulation results indicate that the proposed collision avoidance control system has good collision avoidance effect.
Similar content being viewed by others

References
Abbas, M. A., Milman, R. and Eklund, J. M. (2017). Obstacle avoidance in real time with nonlinear model predictive control of autonomous vehicles. Canadian J. Electrical Computer Engineering 40, 1, 12–22.
Ackermann, C., Bechtloff, J. and Isermann, R. (2015). Collision avoidance with combined braking and steering. 6th Int. Munich Chassis Symp., 199–213.
Anderson, S. J., Peters, S. C., Pilutti, T. E. and Iagnemma, K. (2011). Design and development of an optimal- control-based framework for trajectory planning, threat assessment, and semi-autonomous control of passenger vehicles in hazard avoidance scenarios. Robotics Research the Int. Symp., 70, 39–54.
Boada M. J. L., Boada, B. L., Muñoz, A. and Diaz, V. (2006). Integrated control of front-wheel steering and front braking forces on the basis of fuzzy logic. Proc. Institution of Mechanical Engineers Part D: J. Automobile Engineering 220, 3, 253–267.
Brown, M., Funke, J., Erlien, S. and Gerdes, J. C. (2017). Safe driving envelopes for path tracking in autonomous vehicles. Control Engineering Practice, 61, 307–316.
Chen, W. W., Wang, J. E., Wang, M. L. and Wang, J. B. (2014). Adaptive preview control of vision guided intelligent vehicle lateral movement. China Mechanical Engineering 25, 5, 698–704.
Falcone, P., Borrelli, F., Asgari, J., Tseng, H. E. and Hrovat, D. (2007). Predictive active steering control for autonomous vehicle systems. IEEE Trans. Control Systems Technology 15, 3, 566–580.
Febbo, H., Liu, J., Jayakumar, P., Stein, J. L. and Ersal, T. (2017). Moving obstacle avoidance for large, high-speed autonomous ground vehicles. American Control Conf. (ACC), Seattle, WA, USA.
Flad, M., Fröhlich, L. and Hohmann, S. (2017). Cooperative shared control driver assistance systems based on motion primitives and differential games. IEEE Trans. Human Machine Systems 47, 5, 711–722.
Funke, J., Brown, M., Erlien, S. M. and Gerdes, J. C. (2016). Collision avoidance and stabilization for autonomous vehicles in emergency scenarios. IEEE Trans. Control Systems Technology 25, 4, 1204–1216.
Gao, Y. (2014). Model Predictive Control for Autonomous and Semiautonomous Vehicles. Ph. D. Dissertation. UC Berkeley. Berkeley, CA, USA.
Gray, A., Gao, Y. Q., Lin, T., Hedrick, J. K., Tseng, H. E. and Borrelli, F. (2012). Predictive control for agile semiautonomous ground vehicles using motion primitives. American Control Conf. (ACC), Montréal, Canada.
Haytham, A., Elhalwagy, Y. Z., Wassal, A. and Darwish, N. M. (2014). Modeling and simulation of for-wheel steering unmanned ground vehicles using a PID controller. Int. Conf. Engineering and Technology, Cairo, Egypt.
Ji, J., Tang, Z. R., Wu, M. Y. and Fang, J. C. (2018). Path planning and tracking for lane changing based on model predictive control. China J. Highway and Transport 31, 4, 172–178.
Kanarachos, S. A. (2009). A new method for computing optimal obstacle avoidance maneuvers of vehicles. Int. J. Vehicle Autonomous Systems 7, 1/2, 73–95.
Liu, J. C., Jayakumar, P., Stein, J. L. and Ersal, T. (2015). An MPC algorithm with combined speed and steering control for obstacle avoidance in autonomous ground vehicles. ASME Dynamic Systems and Control Conf., Columbus, OH, USA.
Liu, J. C., Jayakumar, P., Stein, J. L. and Ersal, T. (2017). Combined speed and steering control in high-speed autonomous ground vehicles for obstacle avoidance using model predictive control. IEEE Trans. Vehicular Technology 66, 10, 8746–8763.
Pacejka, H. (2012). Tire and Vehicle Dynamics. Elsevier. Amsterdam, Netherlands.
Park, J. M., Kim, D. W., Yoon, Y. S., Kim, H. J. and Yi, K. S. (2009). Obstacle avoidance of autonomous vehicles based on model predictive control. Proc. Institution of Mechanical Engineers Part D: J. Automobile Engineering 223, 12, 1499–1516.
Plessen, M. G., Bernardini, D., Esen, H. and Bemporad, A. (2017). Spatial-based predictive control and geometric corridor planning for adaptive cruise control coupled with obstacle avoidance. IEEE Trans. Control Systems and Technology 26, 1, 38–50.
Tavan, N., Tavan, M. and Hosseini, R. (2015). An optimal integrated longitudinal and lateral dynamic controller development for vehicle path tracking. Latin American J. Solids Structures 12, 6, 1006–1023.
Wang, Q., Ayalew, B. and Weiskircher, T. (2018). Predictive maneuver planning for an autonomous vehicle in public highway traffic. IEEE Trans. Intelligent Transportation System 20, 4, 1303–1315.
Wang, W., Zhao, Y. Q., Xu, J. X. and Liu, W. T. (2014). Research on vehicle path tracking based on fuzzy control. Latin American J. Solids Structures China Mechanical Engineering 25, 18, 2532–2538.
Acknowledgement
This work is supported by the National Natural Science Foundation of China (No. 51905045), Innovative Talents Project of Jilin Province (No. 2020018).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Li, S., Tian, Y., Yue, X. et al. Spatial-based Predictive Control for Vehicle Collision Avoidance by Steering Maneuvers. Int.J Automot. Technol. 23, 41–53 (2022). https://doi.org/10.1007/s12239-022-0004-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12239-022-0004-3