
Abstract
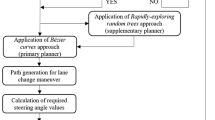
To reduce the calculation time needed to determine the optimal path, the form of the road and the path of an autonomous vehicle were linearized; additionally, among multiple obstacles, only those that were potentially dangerous were chosen. By considering the movement of moving obstacles, the cost was calculated. The calculation time was shortened by reducing the number of design variables of the optimal path, when changing lanes to avoid obstacles, to two. Limiting conditions, such as the lateral and longitudinal acceleration, were excluded from the cost calculation by restricting the search region of the design variable. The final result was calculated using a relatively free search of the golden-section search regarding the initial value setting. For the golden-section search, the number of final design variables was reduced to one; this was done by optimizing the search direction. The search direction was determined based on the final position of the vehicles and the calculated optimal points. By including a collision avoidance algorithm and moving in a short period of time, the calculated optimal path prevented accidents due to path errors caused by simplification. The path could be found easily, even for complex road shapes and with multiple vehicles nearby.
Similar content being viewed by others

Abbreviations
- α :
-
hading error of the autonomous vehicle, rad
- ε :
-
lateral offset error of the autonomous vehicle, m
- θ :
-
heading angle for the final target path, rad
- a :
-
cubic coefficient of the autonomous vehicle path, 1
- b :
-
quadratic coefficient of the autonomous vehicle path, 1
- c :
-
linear coefficient of the autonomous vehicle path, 1
- d :
-
constant value of the autonomous vehicle path, 1
- t i :
-
interval time for collision detection, s
- t f :
-
fillet time, s
- t lat :
-
look ahead time, s
- t p1 :
-
lower bound of tp2, s
- t p2 :
-
solution result of the target time, s
- t p3 :
-
upper bound of tp2, s
- x ″ :
-
linearly mapped x-coordinate, m
- x 0 :
-
x-coordinate of the autonomous vehicle, m
- \({\hat x_0}\) :
-
estimated x-coordinate of the autonomous vehicle, m
- x i :
-
x-coordinate of the obstacle, m
- \({\hat x_{\rm{i}}}\) :
-
estimated x-coordinate of the obstacle, m
- x p1 :
-
lower bound of xp2, m
- x p2 :
-
solution result of the target longitudinal distance, m
- x p3 :
-
upper bound of xp2, m
- x target :
-
target point x, m
- x t,i :
-
expanded target point
- y ″ :
-
linearly mapped y-coordinate, m
- y 0 :
-
y-coordinate of the autonomous vehicle, m
- ŷ 0 :
-
estimated y-coordinate of the autonomous vehicle, m
- y i :
-
y-coordinate of the obstacle, m
- ŷ i :
-
estimated y-coordinate of the obstacle, m
- y target :
-
target point y, m
References
Bareiss, D. and van den Berg, J. (2013). Reciprocal collision avoidance for robots with linear dynamics using LQR-obstacles. Proc. IEEE Int. Conf. Robotics and Automation, Karlsruhe, Germany.
Kim, W., Kim, D., Yi, K. and Kim, H. (2012). Development of a path-tracking control system based on model predictive control using infrastructure sensor. Vehicle System Dynamics: Int. J. Vehicle Mechanics and Mobility 50, 6, 1001–1023.
Kuwata, Y. (2006). Trajectory Planning for Unmanned Vehicles Using Robust Receding Horizon Control. Ph. D. Dissertation. Massachusetts Institute of Technology. Cambridge, Massachusetts, USA.
Kuwata, Y., Teo, J., Karaman, S., Fiore, G., Frazzoli, E. and How, J. (2008). Motion planning in complex environments using closed-loop prediction. AIAA Guidance, Navigation and Control Conf. and Exhibit, Honolulu, Hawaii.
Liu, C., Lee, S., Varnhagen, S. and Eric Tseng, H. (2017). Path planning for autonomous vehicles using model predictive control. Proc. IEEE Intelligent Vehicles Symp. (IV), Los Angeles, California, USA.
Montemerlo, M., Becker, J., Bhat, S., Dahlkamp, H., Dolgov, D., Ettinger, S., Haehnel, D., Hilden, T., Hoffmann, G., Huhnke, B., Johnston, D., Klumpp, S., Langer, D., Levandowski, A., Levinson, J., Marcil, J., Orenstein, D., Paefgen, J., Penny, I., Petrovskaya, A., Pflueger, M., Stanek, G., Stavens, D., Vogt, A. and Thrun, S. (2008). Junior: The stanford entry in the urban challenge. J. Field Robotics 25, 9, 569–597.
SAE Standard (2014). Taxonomy and Definitions for Terms Related to On-road Motor Vehicle Automated Driving Systems. J3016.
Salehinia, S., Ghaffari, A., Khodayari, A., Khajavi, M. N. and Alimardani, F. (2016). Modelling and controlling of car-following behavior in real traffic flow using armax identification and model predictive control. Int. J. Automotive Technology 17, 3, 535–547.
Shim, D. H. and Sastry, S. (2007). An evasive maneuvering algorithm for UAVs in see-and-avoid situations. Proc. IEEE American Control Conf., New York, USA.
Smith, J. S., Hwang, J., Chu, F. and Vela, P. A. (2018). Learning to navigate: Exploiting deep networks to inform sample-based planning during vision-based navigation, arXiv, 1801.05132v1 [cs.RO].
The Boston Consulting Group (2015). Revolution in the Driver’s Seat: The Road to Autonomous Vehicles.
Wangdi, C., Gurung, M. S., Duba, T., Wilkinson, E., Tun, Z. M. and Tripathy, J. P. (2018). Burden, pattern and causes of road traffic accidents in Bhutan, 2013–2014: A police record review. Int. J. Injury Control and Safety Promotion 25, 1, 65–69.
Wulfmeier, M., Rao, D., Zeng Wang, D., Ondruska, P. and Posner, I. (2017). Large-scale cost function learning for path planning using deep inverse reinforcement learning. Int. J. Robotics Research 36, 10, 1073–1087.
Xin, J., Zhao, H., Liu, D. and Li, M. (2018). Application of deep reinforcement learning in mobile robot path planning. Chinese Automation Cong. (CAC), Jinan, China.
Yoon, Y., Choe, T., Park, Y. and Ki, H. J. (2008). Obstacle avoidance for wheeled robots in unknown environments using model predictive control. IFAC Proceedings Volumes 41, 2, 6792–6797.
Acknowledgement
This work was supported in part by Technology Innovation Program No. 10062828, ‘Development of Human Machine Interface for the Driving Control Authority Transition of Autonomous Vehicles using Steering Torque Control’ funded by the Ministry of Trade, Industry & Energy (MOTIE, Korea). This research was also supported in part by the MSIT (Ministry of Science and ICT), Korea, under the ITRC (Information Technology Research Center) support program (iITP-2018-0-01426) supervised by the IITP (Institute for Information & communications Technology Promotion).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Park, C., Jeong, NT., Yu, D. et al. Path Generation Algorithm Based on Crash Point Prediction for Lane Changing of Autonomous Vehicles. Int.J Automot. Technol. 20, 507–519 (2019). https://doi.org/10.1007/s12239-019-0048-1
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12239-019-0048-1