
Abstract
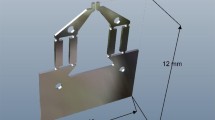
In this work, we have proposed a new method to remotely control and operate the working mechanism of a suitable Ferromagnetic Shape Memory Alloy (FSMA) microactuator system using only a focused low powered laser beam. Model of a simple microgripper system fabricated from a FSMA material and operated by applying the newly discovered Photo Induced Micro Actuation (PIMA) property of FSMAs has been proposed in this report. The design of the fabricated FSMA microgripper was developed using a standard Computer Aided Engineering (CAE) software. The operating mechanism of the newly modelled microgripper assembly was thoroughly characterized numerically with Finite Element Analysis (FEA) method using the CAE software. A prototype of the microgripper system, as designed in the CAE software numerically, was fabricated and its working mechanism controlled by the PIMA effect was systematically studied. The main advantage of using this laser actuated microgripper system is the reduction in weight of the gripper assembly due to the absence of either electrical motors along with other electrical accessories or complex hydraulics systems as used in conventional gripper systems to control the working mechanism of the gripper end effectors. The gripping mechanism of the prototype microgripper system can be controlled only by the low powered laser beams. This is the first system attempted in the world where the PIMA effect was employed in any kind of microactuator application.














Similar content being viewed by others

Data Availability
The datasets generated during and/or analysed during the current study are available from the corresponding author on reasonable request.
References
Bryzek J (1996) Impact of MEMS technology on society. Sens. Actuators A Phys. 56:1
Judy JW (2001) Microelectromechanical systems (MEMS): fabrication, design and applications. Smart Mater. Struct. 10:1115
Nespoli A, Besseghini S, Pittaccio S, Villa E, Viscuso S (2010) The high potential of shape memory alloys in developing miniature mechanical devices: A review on shape memory alloy mini-actuators. Sens. Actuator A Phys. 158:149
Kohl M, Srinivasa Reddy Y, Khelfaoui F, Krevet B, Backen A, Fähler S, Eichhorn T, Jakob G, Mecklenburg A (2010) Recent Progress in FSMA Microactuator Developments. Mater. Sci. Forum 635:145
Kohl M, Krevet B, Ohtsuka M, Brugger D, Liu Y (2006) Ferromagnetic Shape Memory Microactuators. Mater. Trans. JIM 47:639
Kohl M, Gueltig M, Pinneker V, Yin R, Wendler F, Krevet B (2014) Magnetic Shape Memory Microactuators. Micromachines 5:1135
Lagoudas DC (ed) (2008) “Shape Memory Alloys Modeling and Engineering Applications” Springer
Murray SJ (2000) “Magneto-mechanical properties and applications of Ni-Mn-Ga ferromagnetic shape memory alloy”, Ph. D thesis, Massachusetts Institute of Technology
Karaca HE, Karaman I, Basaran B, Ren Y, Chumlyakov YI, Maier HJ (2009) Magnetic Field-Induced Phase Transformation in NiMnCoIn Magnetic Shape Memory Alloys—A New Actuation Mechanism with Large Work Output. Adv. Funct. Mater. 19:983
Hu Z, Rajini Kanth B, Tamang R, Varghese B, Sow CH, Mukhopadhyay PK (2012) Visible microactuation of a ferromagnetic shape memory alloy by focused laser beam. Smart Mater. Struct. 21:032003
Bagchi A, Sarkar S, Mukhopadhyay PK (2018) Investigations on colour dependent photo induced microactuation effect of FSMA and proposing suitable mechanisms to control the effect. Indian J. Phys. 92:883
Bagchi A, Sarkar S, Bysakh S, Sarkar S, Mukhopadhyay PK (2019) Possible mechanisms for degradation of photo induced micro actuation effect in a ferromagnetic shape memory alloy at high temperatures. J. Appl. Phys. 125:144505
Bagchi A, Sarkar S, Bysakh S, Sarkar S, Mukhopadhyay PK (2020) Studies on the Effect of Temperature on the Photo-Induced Microactuation Effect of a Co-based FSMA System. Shap. Mem. Superelasticity 6:3
Alogla AF, Amalou F, Balmer C, Scanlan P, Shu W, Reuben RL (2015) Micro-tweezers: Design, fabrication, simulation and testing of a pneumatically actuated micro-gripper for micromanipulation and microtactile sensing. Sens. Actuator A Phys. 236:394
Jia Y, Xu Q (2013) MEMS Microgripper Actuators and Sensors: The State-of-the-Art Survey. Recent Pat. Mech. Engg. 6:132
Vargas-Chable P, Tecpoyotl-Torres M, Cabello-Ruiz R, Rodriguez-Ramirez JA, Vargas-Bernal R (2019) Modified U-shaped Microactuator with Compliant Mechanism Applied to a Microgripper. Actuators 8:28
Thangavel A, Rengaswamy R, Sukumar P (2019) Design and material analysis for prototyping of four arm mechanical microgripper with self-locking and anti-slipping capability. Microsyst. Technol. 25:851
Dechev N, Cleghorn WL, Mills JK (2003) Microassembly of 3-D MEMS Structures Utilizing a MEMS Microgripper with a Robotic Manipulator. IEEE International Conference on Robotics and Automation 3:3193
“Nikon Eclipse Ti-U inverted microscope” user manual.
Müllner P, Clark Z, Kenoyer L, Knowlton WB, Kostorz G (2008) Nanomechanics and magnetic structure of orthorhombic Ni–Mn–Ga martensite. Mater. Sci. Eng. A 481-482:66
Wu D, Crone WC, Perepezko J (2002) “Mechanical Behavior of Nanostructured Melt Spun NiTi Shape Memory Alloy”, Society for Experimental Mechanics, 2002 SEM Annual Conference Proceedings, Milwaukee, WI
Jiang B, Wang J, Xu L, Qian C, Liu T, Dai J, Hou X (2018) Tunable Mechanical Properties of Ti-Zr-Ni-Cr-V Amorphous Ribbons via Different Melt Spinning Speeds during Rapid Solidification Process. Materials 11:947
Bagchi A, Sarkar S, Bysakh S, Tiwary CS, Hossain MS, Sarkar S, Mukhopadhyay PK (2020) Microstructural evolution and its outcome on the photo induced micro actuation effect and mechanical properties of copper doped Co-Ni-Al FSMA. J. Alloys Compd. 846:156432
Oliver W, Pharr G (1992) An improved technique for determining hardness and elastic modulus using load and displacement sensing indentation experiments. J Mater. Res. 7(6):1564
Acknowledgements
One of the authors, AB, would like to thank the Council of Scientific & Industrial Research, Govt. of India, for the grant of a senior research fellowship to him. He along with GS and PKM would also like to thank TRC for providing financial support in the form of a project grant [No. AIII/64/SNB/2014(C)].
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflicts of interests/Competing interests
The authors have no competing interests to declare that are relevant to the content of this article.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Bagchi, A., Biswas, A., Singh, G. et al. Finite element analysis of a FSMA microgripper for determination of force experienced by it due to photo induced micro actuation effect. J Micro-Bio Robot 17, 79–92 (2021). https://doi.org/10.1007/s12213-022-00147-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12213-022-00147-0