
Abstract
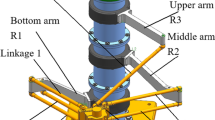
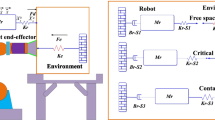
Industrial robots suffer from difficulties in predicting and guaranteeing tracking performance due to the complex dynamic behavior and inaccurate mechatronics model. This study investigates the tracking error and motion accuracy improvement based on a mechatronics model of a 5-degree of freedom hybrid spray-painting robot. The dynamic model of the robot is derived by using Lagrange equation, and an identification method is presented to identify the torque coefficient and joint friction synchronously. An accurate mechatronics model is established after the theoretical dynamic modeling and friction identification. The tracking error generation mechanism of the robot control system is studied, and its analytical equation is derived on the basis of a transfer function. A multichannel feedforward controller is synthesized to reduce the tracking error from different sources. The effectiveness of the proposed method in improving tracking accuracy is verified by physical experiments.
Similar content being viewed by others

References
Z. Y. Li, D. J. Zhao and J. S. Zhao, Structure synthesis and workspace analysis of a telescopic spraying robot, Mechanism and Machine Theory, 133 (2019) 295–310.
J. Wu et al., Workspace and dynamic performance evaluation of the parallel manipulators in a spray-painting equipment, Robotics and Computer-Integrated Manufacturing, 44 (2017) 199–207.
J. He, H. C. Zheng and F. Gao, Dynamics and control of a 7-DOF hybrid manipulator for capturing a non-cooperative target in space, Mechanism and Machine Theory, 140 (2019) 83–103.
B. B. Lian et al., Stiffness analysis and experiment of a novel 5-DoF parallel kinematic machine considering gravitational effects, International Journal of Machine Tools and Manufacture, 95 (2015) 82–96.
G. Lee et al., Minimizing energy consumption of parallel mechanisms via redundant actuation, IEEE/ASME Transactions on Mechatronics, 20 (6) (2015) 2805–2812.
T. Huang et al., Conceptual design and dimensional synthesis for a 3-DOF module of the TriVariant-a novel 5-DOF reconfigurable hybrid robot, IEEE Transactions on Robotics, 21 (3) (2005) 449–456.
H. S. Choi et al., Development of hybrid robot for construction works with pneumatic actuator, Automation in Construction, 14 (4) (2005) 452–459.
W. W. He, L. P. Wang and L. W. Guan, A novel method for evaluating the validity of dynamic accuracy test pieces for five-axis machine tools, Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 234 (11) (2020) 2189–2210.
J. Wu et al., Dynamics and control of a planar 3-DOF parallel manipulator with actuation redundancy, Mechanism and Machine Theory, 44 (4) (2009) 835–849.
Z. H. Xie et al., Tracking error prediction informed motion control of a parallel machine tool for high-performance machining, International Journal of Machine Tools and Manufacture, 164 (2021) 103714.
L. Y. Dai et al., The generation mechanism of tracking error during acceleration or deceleration phase in ultraprecision motion systems, IEEE Transactions on Industrial Electronics, 66 (9) (2019) 7109–7119.
C. N. Cho, J. T. Hoing and H. J. Kim, Neural network based adaptive actuator fault detection algorithm for robot manipulators, Journal of Intelligent and Robotic Systems, 95 (1) (2019) 137–147.
W. Z. Lu, A. Keyhani and A. A. Fardoun, Neural network-based modeling and parameter identification of switched reluctance motors, IEEE Transactions on Energy Conversion, 18 (2) (2003) 284–290.
J. Cazalilla et al., Adaptive control of a 3-DOF parallel manipulator considering payload handling and relevant parameter models, Robotics and Computer-Integrated Manufacturing, 30 (5) (2014) 468–477.
Y. Liu et al., A method for measuring the inertia properties of a rigid body using 3-URU parallel mechanism, Mechanical Systems and Signal Processing, 123 (2019) 174–191.
N. Karbasizadeh et al., Experimental dynamic identification and model feed-forward control of Novint Falcon haptic device, Mechatronics, 51 (2018) 19–30.
A. Azizi, Applications of artificial intelligence techniques to enhance sustainability of industry 4.0: design of an artificial neural network model as dynamic behavior optimizer of robotic arms, Complexity, 2020 (2020) 8564140.
A. Azizi et al., Intelligent mobile robot navigation in an uncertain dynamic environment, Applied Mechanics and Materials, 367 (2013) 388–392.
A. Damak, Z. Driss and M. S. Abid, Optimization of the helical Savonius rotor through wind tunnel experiments, Journal of Wind Engineering and Industrial Aerodynamics, 174 (2018) 80–93.
M. Kumars, G. Hassan and N. Hashem, Obtaining mathematical functions of the propeller thrust and torque coefficients fluctuations at non-uniform wake flow including geometry effects, Mechanics and Industry, 19 (2) (2018) 205.
H. Tufail and K. Hitoshi, Comparative analysis of design concepts of mechatronics systems with a CAD tool for system architecting, Mechatronics, 24 (7) (2014) 788–804.
H. Ghazoi et al., Conceptual design methodology for the preliminary study of a mechatronic system: application to wind turbine system, Mechanics and Industry, 18 (4) (2017) 413.
F. Boeren et al., Joint input shaping and feedforward for point-to-point motion: automated tuning for an industrial nanopositioning system, Mechatronics, 24 (6) (2014) 572–581.
E. Evers, M. van de Wal and T. Oomen, Beyond decentralized wafer/reticle stage control design: a double-youla approach for enhancing synchronized motion, Control Engineering Practice, 83 (2019) 21–32.
N. Banka and S. Devasia, Application of iterative machine learning for output tracking with magnetic soft actuators, IEEE-ASME Transaction on Mechatronics, 23 (5) (2018) 2186–2195.
T. Sun, D. Liang and Y. M. Song, Singular-perturbation-based nonlinear hybrid control of redundant parallel robot, IEEE Transactions on Industrial Electronics, 65 (99) (2018) 3326–3336.
X. Yang et al., Continuous friction feedforward sliding mode controller for a TriMule hybrid robot, IEEE/ASME Transactions on Mechatronics, 23 (4) (2018) 1673–1683.
J. Y. Yao, W. X. Deng and Z. X. Jiao, Adaptive control of hydraulic actuators with LuGre model-based friction compensation, IEEE Transactions on Industrial Electronics, 62 (10) (2015) 6469–6477.
A. Azizi and H. Mobki, Applied mechatronics: designing a sliding mode controller for active suspension system, Complexity (2021) 6626842.
Z. Wang, C. X. Hu and Y. Zhu, Dynamical model based contouring error position-loop feedforward control for multiaxis motion systems, IEEE Transactions on Industrial Informatics, 15 (8) (2019) 4686–4695.
L. Y. Dai et al., Auto-tuning of model-based feedforward controller by feedback control signal in ultraprecision motion systems, Mechanical Systems and Signal Processing, 142 (2020) 106764.
Y. Jiang et al., A data-driven iterative decoupling feedforward control strategy with application to an ultraprecision motion stage, IEEE Transactions on Industrial Electronics, 62 (1) (2015) 620–627.
L. Blanken et al., Data-driven feedforward tuning using non-causal rational basis functions: with application to an industrial flatbed printer, Mechatronics, 71 (2020) 102424.
S. Rashidnejhad et al., Optimal trajectory planning for parallel robots considering time-jerk, Applied Mechanics and Materials, 390 (2013) 471–477.
Acknowledgments
This work was supported by the National Natural Science Foundation of China (Grant No. 51975321), EU H2020-MSCA-RISE-ECSASDPE (No. 734272), and Tianjin Key Laboratory of High Speed Cutting and Precision Machining.
Author information
Authors and Affiliations
Corresponding author
Additional information
Jun Wu is an Associate Professor in the Department of Mechanical Engineering, Tsinghua University.
His current research interests include robot dynamics, dynamics, and control of parallel kinematic machine, and optimal design of redundant parallel mechanisms.
Zilin Liu is a Ph.D. candidate in the Department of Mechanical Engineering, Tsinghua University, Beijing, China. His current research interests include the dynamics and control of parallel mechanisms.
Guang Yu is a research assistant in the Department of Mechanical Engineering at Tsinghua University, Beijing, China. His research interests include static stiffness analysis of parallel mechanisms, structural dynamics of parallel mechanism, and chatter stability of parallel machine tools.
Yuyao Song is a Ph.D. candidate at the Department of Mechanical Engineering, Tsinghua University, Beijing, China. His current research interests include the electromechanical coupling dynamics and similitude analysis of parallel mechanisms.
Rights and permissions
About this article

Cite this article
Wu, J., Liu, Z., Yu, G. et al. A study on tracking error based on mechatronics model of a 5-DOF hybrid spray-painting robot. J Mech Sci Technol 36, 4761–4773 (2022). https://doi.org/10.1007/s12206-022-0835-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12206-022-0835-x