
Abstract
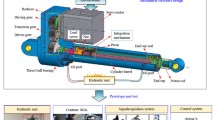
A novel pneumatic-electric hybrid actuator is studied and developed to enable precise positioning within a cylinder stroke in industrial automation. The proposed actuator will also allow engineers to overcome the defects of bias torque and structural coupling in the parallel type of pneumatic-electric hybrid actuators. The novel hybrid actuator consists of a coaxial cylinder layout, the motor lead screw pair, and the position sensor; a serial driving pattern is applied. A special reconfigurable positioning structure is designed for both the fixed and moving module; therefore, a decoupling motion can be achieved for the fast pneumatic motion and the electric precise fine-tuning motion without interference. In this paper, the authors presented the structure of this novel pneumatic-electric hybrid actuator and the accompanying mathematical model for pneumatic-electrical driving. Additionally, the control strategy with proportional-fuzzy mode and the subsection frequency control mode are presented. Experimental results show that the pneumatic-electric hybrid actuator has satisfying motion characteristics, including high speed, low overshoot, and small load sensitivity. Its positioning accuracy is ±0.01 mm, with a positioning time within 2 s, which is better than that of current pneumatic localizable actuators and pneumatic-electric hybrid actuators.
Similar content being viewed by others


References
D. Saravanakumar, B. Mohan and T. Muthuramalingam, A review on recent research trends in servo pneumatic positioning systems, Precision Engineering, 49 (2017) 481–492.
Q. Yang, Control strategy study of hgh performance pneumatic servo system, Doctorial Thesis, Harbin Institute of Technology (2002) (in Chinese).
A. Saleem, B. Taha, T. Tutunji and A. Al-Qaisia, Identification and cascade control of servo-pneumatic system using particle swarm optimization, Simulation Modelling Practice and Theory, 52 (2015) 164–179.
Y. Liu, T. Kung, K. Chang and S. Chen, Observer-based adaptive sliding mode control for pneumatic servo system, Precision Engineering, 37(3) (2013) 522–530.
D. Saravanakumar, B. Mohan and T. Muthuramalingam, Application of response surface methodology on finding influencing parameters in servo pneumatic system, Measurement, 54(1) (2014) 40–50.
D. Saravanakumar, B. Mohan, T. Muthuramalingam and G. Sakthivel, Performance evaluation of interconnected pneumatic cylinders positioning system, Sensors and Actuators: A. Physical, 274(1) (2018) 155–164.
K. Ahn and S. Yokota, Intelligent switching control of pneumatic actuator using on/off solenoid valves, Mechatronics, 15(6) (2005) 683–702.
M. Taghizadeh, A. Ghaffari and F. Najafi, Improving dynamic performances of PWM-driven servo-pneumatic systems via a novel pneumatic circuit, ISA Transactions, 48(4) (2009) 512–518.
Q. Song and F. Liu, Improved control of a pneumatic actuator pulsed with PWM, 2006 2nd IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications, Beijing, China (2006) 1–4.
Y. Zhang and M. Cai, Overall life cycle comprehensive assessment of pneumatic and electric actuator, Chinese Journal of Mechanical Engineering, 27(3) (2014) 584–594.
F. Takemura et al., Control of a hybrid pneumatic/electric motor, Proceedings of the 2000 IEEE/RSJ International Conference on Intelligent Robots and Systems, Takamatsu, Japan (2000) 209–214.
G. M. Bone and X. Chen, Position control of hybrid pneumatic-electric actuators, 2012 American Control Conference (2012) 1793–1799.
G. M. Bone, M. Xue and J. Flett, Position control of hybrid pneumatic-electric actuators using discrete-valued model-predictive control, Mechatronics, 25 (2015) 1–10.
J. Zhang, Research on the actuator of a kind of electric pneumatic composite actuator, Master’s Thesis, Harbin Institute of Technology (2016) (in Chinese).
Y. Zong, Development and application of integrated electric-gas compound actuator, Master’s Thesis, Harbin Institute of Technology (2017) (in Chinese).
P. J. Csonka and K. J. Waldron, Characterization of an electric-pneumatic hybrid prismatic actuator, Journal of Mechanisms and Robotics-Transactions of the ASME, 2 (2010) 1–8.
Y. Shi and G. Shi, Pneumatic and motor hybrid drive linear actuator, Chinese Patent ZL201611213622.8 (2017) (in Chinese).
J. F. Carneiro and F. G. de Almeida, A macro-micro motion servopneumatic device, Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 226(6) (2012) 775–786.
M. Chiang, Development of X-Y servo pneumatic-piezoelectric hybrid actuators for position control with high response, large stroke and nanometer accuracy, Sensors, 10(4) (2010) 2675–2693.
X. Li and J. Yang, Pneumatic-electrric hybrid controll actuator, Chinese Patent ZL201811208567.2 (2020) (in Chinese).
X. Zhu, G. Tao, B. Yao and J. Cao, Adaptive robust posture control of a parallel manipulator driven by pneumatic muscles, Automatica, 44(9) (2008) 2248–2257.
A. Messina, N. I. Giannoccaro and A. Gentile, Experimenting and modelling the dynamics of pneumatic actuators controlled by the pulse width modulation (PWM) technique, Mechatronics, 15(7) (2005) 859–881.
K. Ahn and B. Lee, Intelligent switching control of pneumatic cylinders by learning vector quantization neural network, Journal of Mechanical Science and Technology, 19(2) (2005) 529–539.
B. Najjari, S. M. Barakati, A. Mohammadi, M. J. Futohi and M. Bostanian, Position control of an electro-pneumatic system based on PWM technique and FLC, ISA Transactions, 53(2) (2014) 647–657.
R. Moreau, M. T. Pham, M. Tavakoli, M. Q. Le and T. Redarce, Sliding-mode bilateral teleoperation control design for master-slave pneumatic servo systems, Control Engineering Practice, 20(6) (2012) 584–597.
D. Meng, G. Tao, A. Li and W. Li, Adaptive robust control of pneumatic cylinders using fast switching on/off solenoid valves, Journal of Mechanical Engineering, 51(10) 2015 180–188 (in Chinese).
Author information
Authors and Affiliations
Corresponding author
Additional information
Jiabin Yang, born in 1990, received the B.S. in 2014 at Nanjing University of Science and Technology. He is currently a Ph.D. candidate in the School of Mechanical Engineering at Nanjing University of Science and Technology, Nanjing, China. His research interests include pneumatic control technology, mechanical manufacturing and automation.
Xiaonig Li, born in 1957, is currently a Professor at School of Mechanical Engineering, Nanjing University of Science and Technology, Nanjing, China. He received the Ph.D. in Mechanical and Electronic Engineering from Harbin Institute of Technology, Harbin, China in 1989. His research interests include modeling, simulation, and control for advanced manufacturing systems, and pneumatic control technology, etc.
Rights and permissions
About this article

Cite this article
Yang, J., Li, X. Research and development of a novel pneumatic-electric hybrid actuator. J Mech Sci Technol 35, 2593–2603 (2021). https://doi.org/10.1007/s12206-021-0530-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12206-021-0530-3