
Abstract
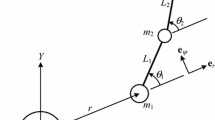
The dynamic responses of a tethered satellite system after debris release were analyzed. The tethered satellite system is modelled as two point masses connected by a string. The equations of motion for the tethered satellite system are derived by using the absolute node coordinate formulation to implement large deformation of the tether. In order to analyze the release timing of the debris captured by the tethered satellite system, the release process and a formula for calculating the orbital radius and velocity of the released debris are defined. The release timing of the debris was analyzed for various capture conditions, which include velocities of the debris, orbital eccentricities of the tethered satellite system, and length of the tether. Finally, the orbital radius of the mother satellite of the tethered satellite system were analyzed after debris release, and the orbital radius and the velocity of the released debris were calculated and discussed.
Similar content being viewed by others
References
M. L. Cosmo and E. C. Lorenzini, Tethers in Space Handbook, Third Ed., Smithsonian Astrophysical Observatory, Cambridge, Massachusetts (1997).
M. Shan, J. Guo and E. Gill, Review and comparison of active space debris capturing and removal methods, Progress in Aerospace Sciences, 80 (2016) 18–32
S. I. Nishida, S. Kawamoto, Y. Okawa, F. Terui and S. Kitamura, Space debris removal system using a small satellite, Acta Astronautica, 65 (1–2) (2009) 95–102.
H. Kojima and T. Sugimoto, Stability analysis of in-plane and out-of-plane periodic motions of electrodynamic tether system in inclined elliptic orbit, Acta Astronautica, 65 (3–4) (2009) 477–488.
J. R. Sanmartin, E. C. Lorenzini and M. Martinez-Sanchez, Electrodynamic tether applications and constraints, Journal of Spacecraft and Rockets, 47 (3) (2010) 442–456.
G. Li, Z. H. Zhu and S. A. Meguid, Libration and transverse dynamic stability control of flexible bare electrodynamic tether systems in satellite deorbit, Aerospace Science and Technology, 49 (2016) 112–129
G. Li, Z. H. Zhu, S. Ruel and S. A. Meguid, Multiphysics elastodynamic finite element analysis of space debris deorbit stability and efficiency by electrodynamic tethers, Acta Astronautica, 137 (2017) 320–333
V. Aslanov and V. Yudintsev, Dynamics of large space debris removal using tethered space tug, Acta Astronautica, 91 (2013) 149–156
L. Jasper and H. Schaub, Input shaped large thrust maneuver with a tethered debris object, Acta Astronautica, 96 (2014) 128–137
V. S. Aslanov and V. V. Yudintsev, Dynamics, analytical solutions and choice of parameters for towed space debris with flexible appendages, Advances in Space Research, 55 (2) (2015) 660–667.
V. S. Aslanov and V. V. Yudintsev, The motion of tethered tug-debris system with fuel residuals, Advances in Space Research 56 (7) (2015) 1493–1501.
M. Sabatini, P. Gasbarri and G. B. Palmerini, Elastic issues and vibration reduction in a tethered deorbiting mission, Advances in Space Research, 57 (9) (2016) 1951–1964.
H. Gläßel, F. Zimmermann, S. Brückner, U. M. Schöttle and S. Rudolph, Adaptive neural control of the deployment procedure for tether-assisted re-entry, Aerospace Science and Technology, 8 (1) (2004) 73–81.
F. Zimmermann, U. M. Schöttle and E. Messerschmid, Optimization of the tether-assisted return mission of a guided re-entry capsule, Aerospace Science and Technology, 9 (8) (2005) 713–721.
X. Cao, P. Zheng and S. Zhang, Atmospheric drag perturbation effect on the deployment of tether-assisted deorbit system, Proc. of the 2009 IEEE International Conference on Mechatronics and Automation, Changchun, China (2009) 4316–4321.
P. Williams, A. Hyslop, M. Stelzer and M. Kruijff, YES2 optimal trajectories in presence of eccentricity and aerodynamic drag, Acta Astronautica, 64 (7–8+) (2009) 745–769.
V. S. Aslanov, Swing principle for deployment of a tetherassisted return mission of a re-entry capsule, Acta Astronautica, 120 (2016) 154–158
V. S. Aslanov and A. S. Ledkov, Tether-assisted re-entry capsule deorbiting from an elliptical orbit, Acta Astronautica, 130 (2017) 180–186
J. Lee and T. Park, Development of a three-dimensional catenary model using cable elements based on absolute nodal coordinate formulation, Journal of Mechanical Science and Technology, 26 (12) (2012) 3933–3941.
K. Kim, J. Lee and W. Yoo, The motion and deformation rate of a flexible hose connected to a mother ship, Journal of Mechanical Science and Technology, 26 (3) (2012) 703–710.
D. Sun, G. Chen and R. Sun, Model reduction of a multibody system including a very flexible beam element, Journal of Mechanical Science and Technology, 28 (8) (2014) 2963–2969.
J. Lim and J. Chung, Dynamic analysis of the tethered satellite system for space debris capture, Nonlinear Dynamics (2018) 1–18.
H. D. Curtis, Orbital Mechanics for Engineering Students, Second Ed., Butterworth-Heinemann (2013).
Author information
Authors and Affiliations
Corresponding author
Additional information
Recommended by Editor No-Cheol Park
Jonghyuk Lim received his B.S. degree in 2012 from the Department of Mechanical Engineering at Hanyang University. He is currently a Ph.D. candidate in the Department of Mechanical Engineering at Hanyang University. His research interests are the dynamic analysis of a tethered satellite system.
Jintai Chung received his B.S. and M.S. degrees from the Department of Mechanical Engineering at Seoul National University in 1984 and 1986, respectively. He obtained his Ph.D. degree from the Department of Mechanical Engineering at University of Michigan, Ann Arbor in 1992. He is currently a Professor in the Department of Mechanical Engineering at Hanyang University. His research interests are vibration and noise reductions of rotating machines, vehicles and home appliances.
Rights and permissions
About this article

Cite this article
Lim, J., Chung, J. Removal of captured space debris using a tethered satellite system. J Mech Sci Technol 33, 1131–1140 (2019). https://doi.org/10.1007/s12206-019-0211-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12206-019-0211-7