
Abstract
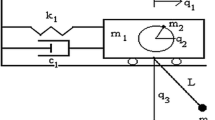
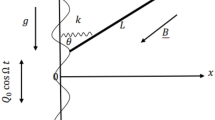
The dynamics of an electromechanical pendulum that collides with an external moving mass is considered. The Melnikov function is derived to determine the effects of periodic collisions on the threshold condition for the appearance of Smale horseshoes chaos in the system. In order to counterbalance the action of the collision, a pulse-like periodic controller is used and the results show the efficiency of the controller to reduce the distortions due to collision and change the parameters boundary delineating the chaotic domain.
Similar content being viewed by others

References
M. di Bernardo, C. J. Budd, A. R. Champneys and P. Kowalczyk, Piecewise-smooth dynamical systems theory and applications, Springer-Verlag London Limited (2008).
W. Serweta, A. Okolewski, B. Blazejczyk-Okolewska, K. Czolczynski and T. Kapitaniak, Mirror hysteresis and Lyapunov exponents of impact oscillator with symmetrical soft stops, International Journal of Mechanical Sciences, 101-102 (2015) 89–98.
F. Peterka, Behaviour of impact oscillator with soft and preloaded stop, Chaos, Solitons and Fractals, 18 (2003) 79–88.
J. Newman and O. Makarenkov, Resonance oscillations in a mass-spring impact oscillator, Nonlinear Dyn, 79 (2015) 111–118.
S. L. T. de Souza, I. L. Caldas and R. L. Viana, Damping control law for a chaotic impact oscillator, Chaos, Solitons and Fractals, 32 (2007) 745–750.
J. Lee, The corresponding phenomena of mechanical and electronic impact oscillator, Sound and Vibration, 311 (2008) 579–587.
B. K. Clark, E. Rosa, A. D. Hall and T. R. Shepherd, Dynamics of an electronic impact oscillator, Physics Letters A, 318 (2003) 514–521.
C. N. Bapat, Periodic motions of an impact oscillator, Sound and Vibration, 209 (2) (1998) 43–60.
L. N. Virgin and C. J. Begley, Grazing bifurcations and basins of attraction in an impact-friction oscillator, Physica D, 130 (1999) 43–57.
V. Sh. Burd and V. L. Krupenin, Subharmonic resonance oscillations of impact oscillator, Journal of Machinery Manufacture and Reliability, 40 (3) (2011) 201–207.
H. Taghavifar, A. Mardani and A. H. Hosseinloo, Experimental analysis of the dissipated energy through tire-obstacle collision dynamics, Energy, 91 (2015) 573–578.
C. Y. Xia, H. Xia and G. De Roeck, Dynamic response of a train-bridge system under collision loads and running safety evaluation of high-speed trains, Computers and Structures, 140 (2014) 23–38.
Y. Yavin and C. Frangos, Control of a three-link manipulator: Collision avoidance of a moving obstacle, Computers and Mathematics with Applications, 47 (2004) 1627–1630.
A. Elmarakbi, M. Elkady and J. MacIntyre, Numerical analysis of vehicle-to-vehicle impact using vehicle dynamics control systems for collision mitigation, Int. J. Dynam. Control, 1 (2013) 172–191.
H. Yuan and T. Shim, Model based real-time collision-free motion planning for nonholonomic mobile robots in unknown dynamic environments, Int. J. Precision Engineering and Manufacturing, 14 (3) (2013) 359–365.
U. Benchetrit, E. Lenz and M. Shoham, Collision detection in static and dynamic complex scene not having geometric coherence, Int. J. Adv. Manuf. Technol., 14 (1998) 70–76.
L. Ludwig and J. Haurykiewicz, Collision checking analysis tool: Discovering dynamic collisions in a modeling and simulation environment, Int. J. Interact. Des. Manuf., 1 (2007) 135–141.
S. Yang and G. Chen, Study on dynamic simulation system for vessel’s collision process and its application, Procedia Engineering, 15 (2011) 3875–3880.
H. Fang, J. Chen and L. Dou, Dynamic self-collision detection and prevention for 2-DOF robot arms using intervalbased analysis, Journal of Mechanical Science and Technology, 25 (8) (2011) 2077–2087.
C. May, H. Janocha, E. Grasso and D. Naso, A pendulum actuator and its force generation capabilities, Proc. 7th Int. Conf. on Multibody Systems, Nonlinear Dynamics, and Control (2009) 1769–1775.
N. Ida, Design and control of a magnetic pendulum actuator, 13th Int. Conf. on Optimization of Electrical and Electronic Equipment (OPTIM) (2012) Doi: 10.1109/OPTIM. 2012.6231898.
Y. Guo and A. C. J Luo, Analytical bifurcation trees of a periodically excited pendulum, ASME Proc. Dynamics, Vibration and Control (2016) V04BT05A016, Doi: 10.1115/IMECE 2016-65916.
L. Zhou, S. S. Liu and F. Chen, Subharmonic bifurcations and chaotic motions for a class of inverted pendulum system, Chaos, Solitons and Fractals, 99 (2017) 270–277.
S. Li, X. Gong, W. Zhang and Y. Hao, The Melnikov method for detecting chaotic dynamics in a planar hybrid piecewise-smooth system with a switching manifold, Nonlinear Dynamics, 89 (2017) 939–953.
J. Xie, S.-H. He, Z.-H. Liu and Y. Chen, On application Melnikov method to detecting the edge of chaos for a microcantilever, New Advances in Mechanisms, Mechanical Transmission and Robotics (2016) 155–163.
M. Poliashenko and S. R. Mckay, Chaos due to homoclinic and heteroclinic orbits in two coupled oscillators with nonisochronism, Phys.Rev. A, 46 (1992) 5271–5274.
J. C. Chedjou, P. Woafo and S. Domngang, Shilnikov chaos and dynamics of a self-sustained electromechanical transducer, J. Vibration and Acoustics, 123 (2001) 170–174.
Y. Zhang, P. Shi, C.-C. Lim, H. Zhu, J. Hu and Y. Zeng, Chaotification of a class of linear switching systems based on Shilnikov criterion, J. Frankl. Inst., 354 (2017) 5519–5536.
Y. Zhang, P. Shi, H. Zhu, J. Hu and Y. Zeng, Generating chaos for a class of linear switching control systems: A hybrid approach, J. Frankl. Inst., 352 (2015) 5853–5865.
Y. Zhang, X. Liu, H. Zhu and Y. Zeng, Chaotification of a class of linear switching systems by hybrid driven methods, Int. J. Bifurc. Chaos, 24 (2014) 1450033.
A. Notué Kadjie and P. Woafo, Effects of springs on a pendulum electromechanical energy harvester, Theoretical & Applied Mechanics Letters, 4 (2014) 063001.
V. K. Melnikov, On the stability of the center for time periodic perturbations, Trans. Moscow Math. SOC, 2 (1963) 1–57.
S. Wiggins, Introduction to applied nonlinear dynamical systems and chaos, Springer Verlag, New York (1990).
H. Lee and J. Oh, Hopping system control with an approximated dynamics model and upper-body motion, Journal of Mechanical Science and Technology, 29 (11) (2015) 4891–4900.
M. Nam, S. Han and J. Lee, Trajectory following control of mobile inverted pendulum robot with pre-determined tilt angle, Journal of Mechanical Science and Technology, 29 (12) (2015) 5417–5424.
L.-W. Lee and I.-H. Li, Design and implementation of a robust FNN-based adaptive sliding-mode controller for pneumatic actuator systems, Journal of Mechanical Science and Technology, 30 (1) (2016) 381–396.
J. Metsebo, N. Upadhyay, P. K. Kankar and B. R. Nana Nbendjo, Modelling of a rotor-ball bearings system using Timoshenko beam and effects of rotating shaft on their dynamics, Journal of Mechanical Science and Technology, 30 (12) (2016) 5339–5350.
M. Ahmedalbashir, L. Romdhane and J. Lee, Dynamics of a four-bar mechanism with clearance and springs-Modeling and experimental analysis, Journal of Mechanical Science and Technology, 31 (3) (2017) 1023–1033.
Author information
Authors and Affiliations
Corresponding author
Additional information
Recommended by Associate Editor Hugo Rodrigue
Arnaud Notué Kadjie is a Ph.D. student at the University of Yaoundé 1, Cameroon. He is holder of a Master’s Degree in Physics obtained at the University of Yaoundè 1, Cameroon since 2012. His actual research is oriented towards the dynamics and control of electromechanical systems with the applications in the energy harvesting process and the optimization of actuator. He is a member of the research unit on Modeling and Simulation in Engineering and SPIE since 2015.
Isaac Kemajou was born on 16 October 1983 in Nkongsamba, Cameroon. He obtained his Master’s Degree in Physics at University of Yaoundé I. His research is concentrated on the dynamics of electromechanical systems having a strong nonlinear inductance at the research unit on Modeling and Simulation in Engineering, Biomimetics and Prototypes. He is a member of SPIE since 2015.
Paul Woafo is Professor of Physics at the University of Yaoundé I, Cameroon. He is holder of a “Doctorat de troisième cycle” and a “Doctorat d’Etat” both obtained in Cameroon in 1992 and 1997 in the field of Mechanics (Nonlinear Dynamics). He is presently managing a research unit on Modeling and Simulation in Engineering, Biomimetics and Prototypes (www.lamsebp.org) with strong interests in Electromechanical devices, control of vibrations, dynamics of semiconductor lasers, optoelectronic oscillators, chaos cryptography, biological physics, biomimetics, and appropriate technologies for development. His is presently co-author of more than 200 papers published in peer-reviewed journals by American Physical Society, American Institute of Physics, American Society of Mechanical Engineers, Elsevier-science, IOP-UK, Academic Press, Springer, IEEE, etc. He has been ICTP associate member from 1995 to 2005, and presently Senior Associate Member of ICTP, winner of the TWAS Prize for Young Scientists and Georg Forster Research fellow of the Humboldt Foundation (Germany). He has been to various institutions abroad for teaching and research.
Rights and permissions
About this article

Cite this article
Notué Kadjie, A., Kemajou, I. & Woafo, P. Control of an electromechanical pendulum subjected to impulsive disturbances using the Melnikov theory approach. J Mech Sci Technol 32, 865–874 (2018). https://doi.org/10.1007/s12206-018-0137-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12206-018-0137-x