
Abstract
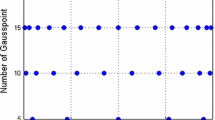
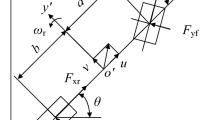
A method based on optimal control theory is presented in this paper to solve path-tracking problems in inverse vehicle handling dynamics. The idea behind is to identify the optimal steering torque input along a prescribed path to generate an expected trajectory that guarantees minimum clearance. Based on this purpose, the path-tracking problem, treated as an optimal control problem, is first converted into a nonlinear programming problem by Gauss pseudospectral method (GPM) and is then solved with Sequential quadratic programming (SQP). Finally, a real vehicle test is executed to verify the rationality of the proposed model and methodology. Results show that the minimum lateral position error of the generated path-tracking trajectory can be a good solution for path-tracking problem in inverse vehicle handling dynamics for GPM. The algorithm has higher calculation accuracy compared with other methods to solve path-tracking problems. The study could help drivers identify safe lane-keeping trajectories and areas easily.
Similar content being viewed by others

References
K. Wongun, K. Dongwook and Y. Kyongsu, Development of a path-tracking control system based on model predictive control using infrastructure sensors, Vehicle System Dynamics, 50 (6) (2012) 1001–1023.
T. Siavash, R. Subhash and H. Henry, Influence of human driving characteristics on path tracking performance of vehicle, Intelligent Robotics and Applications-Proceedings of the 5th International Conference, Montreal, Canada (2012) 207–216.
H. Toshihiro, N. Osamu and K. Hiromitsu, Automatic pathtracking controller of a four-wheel steering vehicle, Vehicle System Dynamics, 47 (10) (2009) 1205–1227.
D. Bektache, C. Tolba and N. Ghoualmi-Zine, Forecasting approach in VANET based on vehicle kinematics for road safety, International Journal of Vehicle Safety, 7 (2) (2014) 147–167.
Y. C. Ju, Robust controller for an autonomous vehicle with look-ahead and look-down information, Journal of Mechanical Science and Technology, 25 (10) (2011) 2467–2474.
E. Kim, J. Kim and M. Sunwoo, Model predictive control strategy for smooth path tracking of autonomous vehicle with steering actuator dynamics, International Journal of Automotive Technology, 15 (7) (2014) 1155–1164.
S. Taehyun, A. Ganesh and Y. Hongliang, Autonomous vehicle collision avoidance system using path planning and modelpredictive-control-based active front steering and wheel torque control, Journal of Automobile Engineering, 226 (6) (2012) 767–778.
Y. W. Xu, X. B. Cao and T. Li, Extended Kalman filter based pedestrian localization for collision avoidance, IEEE International Conference on Mechatronics and Automation, Chang Chun, China (2009) 805–817.
S. J. Anderson, S. C. Peters and T. E. Pilutti, Semi-autonomous avoidance of moving hazards for passenger vehicles, ASME 2010 Dynamic Systems and Control Conference, Cambridge, Massachusetts, USA (2010) 141–148.
A. J. Amir, B. K. Mohsen and K. Reza, Simultaneous vehiclehandling and path-tracking improvement using adaptive dynamic surface control via a steer-by-wire system, Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 227 (3) (2013) 345–360.
B. Xu, D. J. Stilwell and A. J. Kurdila, A receding horizon controller for motion planning in the presence of moving obstacles, 2010 IEEE International Conference on Robotics and Automation Anchorage Convention District, Anchorage, AK (2010) 974–980.
A. Ghaffari, A. Khodayari and S. Arivin, An ANFIS design for prediction of future state of a vehicle in lane change behavior, 2011 IEEE International Conference on Control System, Computing and Engineering, Penang, Malaysia (2011) 156–161.
S. Jin, Z. Y. Huang and P. F. Tao, Car-following theory of steady-state traffic flow using time-to-collision, Journal of Zhejiang University-SCIENCE A (Applied Physics & Engineering), 12 (8) (2011) 645–654.
D. A. Benson, G. T. Huntington and T. P. Thorvaldsen, A Direct trajectory optimization and costate estimation via an orthogonal collocation method, Journal of Guidance, Control, and Dynamics, 29 (6) (2006) 1435–1440.
G. W. Reddien, Collocation at a discretization in optimal control, SIAM Journal of Control and Optimization, 17 (2) (1979) 298–306.
G. T. Huntington, Advancement and Analysis of A Gauss Pseudospectral Transcription for Optimal Control, Massachusetts, USA (2007).
E. M. Yong, L. Chen and G. G. Tang, A survey of numerical methods for trajectory optimization of spacecraft, Journal of Astronautics, 29 (2) (2008) 397–406 (in Chinese).
Z. L. Jin, J. S. Weng and H. Y. Hu, Rollover stability of a vehicle during critical driving maneuvers, Proc. IMechE, Part D: J. Automobile Engineering, 221 (9) (2007) 1041–1049.
L. X. Zhang, Y. Q. Zhao and G. X. Song, Research on inverse dynamics of vehicle minimum time maneuver problem, China Mechanical Engineering, 18 (21) (2007) 2628–2632 (in Chinese).
I. M. Ross and F. Fahroo, Pseudospectral knotting methods for solving nonsmooth optimal control problems, Journal of Guidance Control and Dynamics, 27 (3) (2004) 397–405.
E. G. Philip, SNOPT: An SQP algorithm for large-scale constrained optimization, SIAM Review, 47 (1) (2005) 99–131.
Author information
Authors and Affiliations
Corresponding author
Additional information
Recommended by Associate Editor Deok Jin Lee
Yingjie Liu obtained his B.S. and M.S. at the Shandong University of Technology, China, in 2007 and 2010, respectively. He later received his Ph.D. degree in 2014 from Nanjing University of Aeronautics and Astronautics, China. He is currently a lecturer at School of Mechanical-Electronic and Vehicle Engineering, Weifang University, China. His current research interests include vehicle system dynamics and control theory on ground vehicles.
Rights and permissions
About this article

Cite this article
Liu, Y., Jiang, J. Optimum path-tracking control for inverse problem of vehicle handling dynamics. J Mech Sci Technol 30, 3433–3440 (2016). https://doi.org/10.1007/s12206-016-0701-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12206-016-0701-9