
Abstract
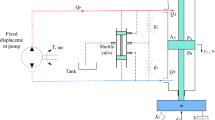
A Highly-integrated valve-controlled cylinder (HIVC) that has the advantage of large power weight ratio and fast response is widely applied in many fields. To ensure high performance of HIVC, control strategy selection and structure parameters optimization are essential; thus, performance-influenced main parameters and secondary parameters should be well-grasped to target control compensation and structure optimization. Trajectory sensitivity analysis (TSA), a branch of sensitivity analysis, can be adapted to research on the effects of control and structure parameter variation on system performance; the analysis conclusions can be used to improve system performance and the analysis has been applied in many applications in various fields. In this paper, based on the mathematical model of the First-order trajectory sensitivity analysis (FOTSA), the mathematical model of Second trajectory sensitivity analysis (SOTSA) is further derived; the general expression of the second-order trajectory sensitivity equations and the special expression that is applicable to each system parameter sensitivity analysis of HIVC are built respectively. Furthermore, based on the position control system of the nonlinear mathematical model of HIVC involved with servo valve dynamic characteristics, flow-pressure nonlinearity, initial piston position of servo cylinder, and friction nonlinearity, the coefficient items and the free items matrices of the special expression are calculated. Moreover, the First-order trajectory sensitivity function (FOTSF) and the Second trajectory sensitivity function (SOTSF) of the 17 main parameters in HIVC are computed on the MATLAB/Simulink platform under nine typical working conditions of the displacement step response. Then, the dynamic change rules and the differences and similarities of each parameter sensitivity analysis results are obtained through FOTSA and SOTSA under different working conditions with different parameter variations; each parameter sensitivity variation histogram based on the two kinds of sensitivity indexes, including the maximum value of the percentage absolute value and the absolute value summation within the sampling time, are given. Furthermore, differences and similarities of each parameter sensitivity index change rule and value are quantitatively analyzed. Finally, the sensitivity index change rules and values of the four parameters in the position control system of HIVC, including system supply oil pressure, proportion gain, initial piston position of servo cylinder, and load are experimentally verified. All above studies indicate that each parameter SOTSA result of HIVC vary under different working conditions. When parameter variation is significant, the differences in certain parameter sensitivity analysis between FOSTA and SOTSA are relatively significant; and SOTSA results are more similar to the test results, which illustrates that SOTSA results are more accurate.
Similar content being viewed by others

References
X. W. Rong, Y. B. Li, J. H. Ruan and B. Li. Design and simulation for a hydraulic actuated quadruped robot, Journal of Mechanical Science and Technology, 26 (4) (2012) 1171–1177.
V. A. Polkovnikov, Synthesis of the main parameters of servo actuators of hydraulic control surface drives of aircraft with a pump-controlled speed regulation, Journal of Computer and Systems Sciences International, 41 (4) (2002) 617–627.
A. Irawan and K. Nonami, Optimal impedance control based on body inertia for a hydraulically driven hexapod robot walking on uneven and extremely soft terrain, Journal of Field Robotics, 28 (5) (2011) 690–713.
S. Claudio, HyQ-design and development of a hydraulically actuated quadruped robot, Liguria, Italy, University of Genoa (2010) 10–15.
S. H. Cho and P. Noskievi, Position tracking control with loadsensing for energy-saving valve-controlled cylinder system, Journal of Mechanical Science and Technology, 26 (2) (2012) 617–625.
I. A. Hiskens and M. A. Pai, Trajectory sensitivity analysis of hybrid system, IEEE Transactions on Circuits and Systems I: Fundamental Theory and Applications, 47 (2) (2000) 204–220.
Z. Yang, Y. M. Zhang, X. F. Zhang and X. Z. Huang, Reliability sensitivity-based correlation coefficient calculation in structural reliability analysis, Chinese Journal of Mechanical Engineering, 25 (3) (2012) 608–614.
A. Abolfazl and R. Reza, Sensitivity analysis of influencing parameters in cavern stability, International Journal of Mining Science and Technology, 22 (5) (2012) 707–710.
W. Liu, G. Cao, H. B. Zhai and Y. S. Liu, Sensitivity analysis and dynamic optimization design of supports positions for engine pipelines, Journal of Aerospace Power, 27 (12) (2012) 2756–2762.
I. J. Toivanen and A. E. Raino, Electromagnetic sensitivity analysis and shape optimization using method of moments and automatic differentiation, IEEE Transactions on Antennas and Propagation, 57 (1) (2009) 168–175.
D. Chatterjee and A. Ghosh, Improvement of transient stability of power system with STATCOM-controller using trajectory sensitivity, International Journal of Electrical Power and Energy Systems, 33 (3) (2011) 531–539.
A. Zamora, E. Fuerte and R. Claudio, Multi-parameter trajectory sensitivity approach for location of series-connected controllers to enhance power system transient stability, Electric Power Systems Research, 80 (9) (2010) 1096–1103.
M. J. Vilenus, The application of sensitivity analysis to electrohydraulic position control servos, Journal of Dynamic Systems, Measurement and Control, Transactions of the ASME, 105 (2) (1983) 77–82.
S. Farasat and H. Ajam, Sensitivity analysis of parameter changes in nonlinear hydraulic control systems, International Journal of Engineering, 18 (3) (2005) 239–252.
X. D. Kong, B. Yu, L. X. Quan and K. X. Ba, Trajectory sensitivity analysis of hydraulic drive unit of quadruped bionic robot, Journal of Mechanical Engineering, 49 (14) (2013) 170–175.
X. D. Kong, B. Yu, L. X. Quan, K. X. Ba and M. T. Li. Parameters sensitivity research on position servo control characteristics of quadruped robot hydraulic drive unit in trotting gait, Robot, 37 (1) (2015) 170–175.
Z. X. Jiao, J. X. Gao, Q. Hua and S. P. Wang, The velocity synchronizing control on the electro-hydraulic load simulator, Chinese Journal of Aeronautics, 17 (1) (2004) 39–46.
Author information
Authors and Affiliations
Corresponding author
Additional information
Recommended by Associate Editor Jae Cheon Lee
Xiangdong Kong, born in 1959, is currently a professor at Yanshan University, China. He serves as the chairman of Fluid Transmission and Control Society which is a branch of Chinese Mechanical Engineering Society (CMES). His main research interests include electro-hydraulic servo control system, heavy machinery fluid transmission and control and robot design and control.
Kaixian Ba, born in 1989, is currently a Ph.D. candidate at Yanshan University, China. He received his M.S. degree from Yanshan University, China, in 2014. His main research interests include electro-hydraulic servo control system and robot design and control.
Bin Yu, born in 1985, is currently a lecturer at Yanshan University, China. He received his Ph.D. degree from Yanshan University, China, in 2014. His main research interests include heavy machinery fluid transmission and control and robot design and control.
Rights and permissions
About this article

Cite this article
Kong, X., Ba, K., Yu, B. et al. Trajectory sensitivity analysis of first order and second order on position control system of highly integrated valve-controlled cylinder. J Mech Sci Technol 29, 4445–4464 (2015). https://doi.org/10.1007/s12206-015-0944-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12206-015-0944-x