
Abstract
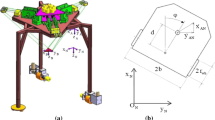
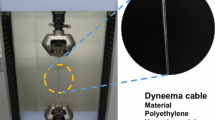
The cable which transfers the signal and power in an industrial robot has a problem of fatigue fracture like steel components. Since the cable is very flexible compared to other components of the system, it is difficult to estimate its motion numerically. Some studies have been done on a large deformation problem, especially in a cable, and a few attempts have been made to apply the absolute nodal coordinate formulation (ANCF), which can simulate a large deformation. Only researches about the fatigue life of structural cables or comparative studies of FEM and ANCF simulations can be found. This paper presents a method to simulate the behavior of the cable harness using the ANCF and to predict the fatigue life while computing the strain time history of the point of interest. Rigid body dynamics is applied for the robot system, while ANCF is used for the cable harness. The simulation is performed by using the dynamic analysis process. The material property of the cable is obtained by a test. A simplified model is prepared. With these data, the behavior of the cable is simulated and the fatigue life is predicted.
Similar content being viewed by others

References
A. A. Shabana, Computer implementation of the absolute nodal coordinate formulation for flexible multibody dynamics, Journal of Nonlinear Dynamics 16 (1998) 293–306
J. H. Seo, Dynamic analysis method and its applications for very flexible multibody systems, Dissertation, Ajou University, (2005)
A. A. Shabana and R. Y. Yakoub, Three dimensional absolute nodal coordinate formulation for beam elements: theory, Transaction of the ASME 123 (2001) 606–613
A. A. Shabana, Flexible multibody dynamics: review of past and recent developments, Journal of Multibody System Dynamics 1 (1997) 189–222
D. Vallejo, J. Mayo, J. L. Escalona and J. Dominguez, Efficient evaluation of the elastic forces and jacobian in the absolute nodal coordinate formulation, Journal of Nonlinear Dynamics Vol. 35 (2004) 313–329
A. A. Shabana, Dynamics of Multibody Systems, 2nd Edition, Cambridge University Press, Cambridge, USA, (1998)
E. J. Haug, Computer-Aided Kinematics and Dynamics of Mechanical Systems, Vol. I: Basic Methods, Allyn and Bacon, USA, (1989)
W. S. Yoo, S. J. Lee and J. H. Sohn, Large oscillations of a thin cantilever beam: physical experiments and simulation using absolute nodal coordinate formulation, Journal of Nonlinear Dynamics 34 (2003) 3–29
Bathe, K. J., Finite Element Procedures, Prentice-Hall, USA, (1995)
J. A. Bannantine, J. J. Comer and J. L. Handrock, Fundamentals of Metal Fatigue Analysis, Prentice Hall, USA, (1990)
Product Catalog, Hitachi Cable Co.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Yoon, J.W., Park, T.W. & Yim, H.J. Fatigue life prediction of a cable harness in an industrial robot using dynamic simulation. J Mech Sci Technol 22, 484–489 (2008). https://doi.org/10.1007/s12206-007-1209-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12206-007-1209-0