
Abstract
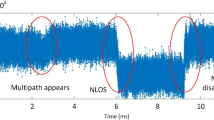
Non-line-of-sight (NLOS) multipath effect is the main factor that restricts the application of global navigation satellite system (GNSS) in complex environments, especially in urban canyon. The effective avoidance of NLOS signals can significantly improve the positioning performance of GNSS receiver. In this paper, an NLOS/LOS classification model based on recurrent neural network is proposed to classify satellite signals received in urban canyon environments. The accuracy of classification is 91%, and the recognition rate of NLOS is 89%; the classification performance is better than traditional machine learning classification models such as support vector machine. For BeiDou navigation satellite system/global positioning system (BDS/GPS) fusion system, the least square algorithm and extended Kalman filter are used to estimate the position. The experimental results show that the three-dimensional positioning accuracy after NLOS recognition is improved about 60% on average compared with the traditional methods, and the positioning stability is also improved significantly.
Similar content being viewed by others

References
JIANG Z, GROVES P D. NLOS GPS signal detection using a dual-polarisation antenna [J]. GPS Solutions, 2014, 18(1): 15–26.
BÉTAILLE D, PEYRET F, VOYER M, et al. Applying standard digital map data in map-aided, lane-level GNSS location [J]. Journal of Navigation, 2015, 68(5): 827–847.
HSU L T, GU Y, KAMIJO S. 3D building model-based pedestrian positioning method using GPS/GLONASS/QZSS and its reliability calculation [J]. GPS Solutions, 2016, 20(3): 413–428.
GU Y, HSU L T, KAMIJO S. GNSS/onboard inertial sensor integration with the aid of 3-D building map for lane-level vehicle self-localization in urban canyon [J]. IEEE Transactions on Vehicular Technology, 2016, 65(6): 4274–4287.
BAUER S, OBST M, STREITER R, et al. Evaluation of shadow maps for non-line-of-sight detection in urban GNSS vehicle localization with VANETs: The GAIN approach [C]//2013 IEEE 77th Vehicular Technology Conference. Dresden, Germany: IEEE, 2013: 1–5.
GROVES P D. Shadow matching: A new GNSS positioning technique for urban canyons [J]. The Journal of Navigation, 2011, 64(3): 417–430.
WANG L, GROVES P D, ZIEBART M K. Smart-phone shadow matching for better cross-street GNSS positioning in urban environments [J]. Journal of Navigation, 2015, 68(3): 411–433.
YOZEVITCH R, MOSHE B B, LEVY H. Breaking the 1 meter accuracy bound in commercial GNSS devices [C]//2012 IEEE 27th Convention of the Electrical and Electronics Engineers in Israel. Eilat, Israel: IEEE, 2012: 1–5.
SUZUKI T. Particle filter-based GNSS positioning with NLOS multipath detection [C]//31st International Technical Meeting of the Satellite Division of the Institute of Navigation. Miami, USA: ION, 2018: 24–28.
SUZUKI T, NAKANO Y, AMANO Y. NLOS multi-path detection by using machine learning in urban environments [C]//30th International Technical Meeting of the Satellite Division of the Institute of Navigation. Portland, USA: ION, 2017: 25–29.
MUNIN E, BLAIS A, COUELLAN N. Convolutional neural network for multipath detection in GNSS receivers [C]//2020 International Conference on Artificial Intelligence and Data Analytics for Air Transportation. Singapore: IEEE, 2020: 1–10.
SOCHAROENTUM M, KARIMI H A, DENG Y. A machine learning approach to detect non-line-of-sight GNSS signals in Nav2Nav [C]//23rd ITS World Congress. Melbourne, Australia: ITS, 2014: 10–14.
YOZEVITCH R, MOSHE B B, WEISSMAN A. A robust GNSS LOS/NLOS signal classifier [J]. Navigation, 2016, 63(4): 429–442.
HSU L T. GNSS multipath detection using a machine learning approach [C]// 2017 IEEE 20th International Conference on Intelligent Transportation Systems. Yokohama, Japan: IEEE, 2017: 1–6.
COMANICIU D, MEER P. Mean shift: A robust approach toward feature space analysis [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002, 24(5): 603–619.
SCARAMUZZA D, MARTINELLI A, SIEGWART R. A toolbox for easily calibrating omnidirectional cameras [C]//2006 IEEE/RSJ International Conference on Intelligent Robots and Systems. Beijing: IEEE, 2006: 5695–5701.
MAO X, WADA M, HASHIMOTO H. A nonlinear model for GPS positioning estimation using filter algorithms [J]. Journal of Shanghai Jiaotong University, 2004, 38(4): 610–615 (in Chinese).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Su, H., Wu, B. & Mao, X. Non-Line-of-Sight Multipath Detection Method for BDS/GPS Fusion System Based on Deep Learning. J. Shanghai Jiaotong Univ. (Sci.) 27, 844–854 (2022). https://doi.org/10.1007/s12204-022-2430-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12204-022-2430-9
Key words
- urban canyon environments
- non-line-of-sight (NLOS) multipath
- recurrent neural network (RNN)
- BeiDou navigation satellite system (BDS)
- global positioning system (GPS)