
Abstract
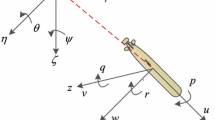
A T-S fuzzy model with two rules is established to exactly describe the nonlinear uncertain heave dynamics of underwater vehicles with bounded heave speed. A single linear-matrix-inequality-based (LMI-based) state feedback controller is then synthesized to guarantee the global stability of the depth control system. Simulation results verify the effectiveness of the proposed approach in comparison with linear-quadratic regulator (LQR) method. Nonlinear disturbance observer is appended to the system when the underwater vehicles are affected by the gravity-buoyancy imbalance. The two-stage control method is effective to stabilize an uncertain system with both parameter uncertainties and external disturbances.
Similar content being viewed by others

References
ELMOKADEM T, ZRIBI M, YOUCEF-TOUMI K. Trajectory tracking sliding mode control of underactuated AUVs [J]. Nonlinear Dynamics, 2016, 84(2): 1079–1091.
CHEN M, JIANG B, ZOU J, et al. Robust adaptive tracking control of the underwater robot with input nonlinearity using neural networks [J]. International ournal of Computational Intelligence Systems, 2010, 3(5): 646–655.
GARCÍA-VALDOVINOS L G, SALGADO-JIMÉNEZ T, BANDALA-SÁNCHEZ M, et al. Modelling, design and robust control of a remotely operated underwater vehicle [J]. International Journal of Advanced Robotic Systems, 2014, 11(1): 1–16.
XU J, WANG M, QIAO L. Dynamical sliding mode control for the trajectory tracking of underactuated unmanned underwater vehicles [J]. Ocean Engineering, 2015, 105: 54–63.
LI Z J, YANG C G, DING N, et al. Robust adaptive motion control for underwater remotely operated vehicles with velocity constraints [J]. International Journal of Control, Automation and Systems, 2012, 10(2): 421–429.
LAPIERRE L. Robust diving control of an AUV [J]. Ocean Engineering, 2009, 36(1): 92–104.
BAGHERI A, MOGHADDAM J J. Simulation and tracking control based on neural-network strategy and sliding-mode control for underwater remotely operated vehicle [J]. Neurocomputing, 2009, 72(7/8/9): 1934–1950.
KHODAYARI M H, BALOCHIAN S. Modeling and control of autonomous underwater vehicle (AUV) in heading and depth attitude via self-adaptive fuzzy PID controller [J]. Journal of Marine Science and Technology, 2015, 20(3): 559–578.
SANTHAKUMAR M, ASOKAN T. Investigations on the hybrid tracking control of an underactuated autonomous underwater robot [J]. Advanced Robotics, 2010, 24(11): 1529–1556.
YAN Z P, YU H M, ZHANG W, et al. Globally finite-time stable tracking control of underactuated UUVs [J]. Ocean Engineering, 2015, 107: 132–146.
XIANG X B, YU C Y, ZHANG Q. Robust fuzzy 3D path following for autonomous underwater vehicle subject to uncertainties [J]. Computers & Operations Research, 2017, 84: 165–177.
LENDEK Z, GUERRA T M, BABUŠKA R, et al. Stability analysis and nonlinear observer design using Takagi-Sugeno fuzzy models [M]. Berlin: Springer, 2011.
JUN S W, KIM D W, LEE H J. Design of TS fuzzy-model-based controller for depth control of autonomous underwater vehicles with parametric uncertainties [C]// 11th International Conference on Control, Automation and Systems. Gyeonggi-do, Korea: IEEE, 2011: 1682–1684.
ZHANG X, XIAO Y, ZHANG G S, et al. Delay-independent stabilization of depth control for unmanned underwater vehicle [C]// 2016 IEEE International Conference on Mechatronics and Automation. Harbin, China: IEEE, 2016: 2494–2499.
FOSSEN T I. Handbook of marine craft hydrodynamics and motion control [M]. Chichester, UK: John Wiley & Sons, Ltd., 2011.
SMALLWOOD D A, WHITCOMB L L. Model-based dynamic positioning of underwater robotic vehicles: theory and experiment [J]. IEEE Journal of Oceanic Engineering, 2004, 29(1): 169–186.
BESSA W M, DUTRA M S, KREUZER E. An adaptive fuzzy sliding mode controller for remotely operated underwater vehicles [J]. Robotics and Autonomous Systems, 2010, 58(1): 16–26.
MAALOUF D, CHEMORI A, CREUZE V. L1 Adaptive depth and pitch control of an underwater vehicle with real-time experiments [J]. Ocean Engineering, 2015, 98: 66–77.
CHU Z Z, ZHU D Q, YANG S X, et al. Adaptive sliding mode control for depth trajectory tracking of remotely operated vehicle with thruster nonlinearity [J]. Journal of Navigation, 2017, 70(1): 149–164.
MAKAVITA C D, JAYASINGHE S G, NGUYEN H D, et al. Experimental study of a command governor adaptive depth controller for an unmanned underwater vehicle [J]. Applied Ocean Research, 2019, 86: 61–72.
OCIMF. Prediction of wind and current loads on VL-CCs [M]. 2nd ed. London, UK: Witherby & Co., Ltd., 1994.
NORRBIN N H. Theory and observations on the use of a mathematical model for ship manoeuvring in deep and confined waters [M]. Goteborg, Swedish: Swedish State Shipbuilding Experimental Tank, 1971.
CHEN W H. Disturbance observer based control for nonlinear systems [J]. IEEE/ASME Transactions on Mechatronics, 2004, 9(4): 706–710.
XU M M, FENG Z P, BI A Y, et al. Dynamic modeling of complex-shaped underwater vehicle [J]. Ship Science and Technology, 2017, 39(9): 23–28 (in Chinese).
YANG J, LI S H, YU X H. Sliding-mode control for systems with mismatched uncertainties via a disturbance observer [J]. IEEE Transactions on Industrial Electronics, 2013, 60(1): 160–169.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Qian, Y., Feng, Z., Bi, A. et al. T-S Fuzzy Model-Based Depth Control of Underwater Vehicles. J. Shanghai Jiaotong Univ. (Sci.) 25, 315–324 (2020). https://doi.org/10.1007/s12204-020-2165-4
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12204-020-2165-4