
Abstract
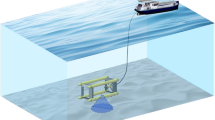
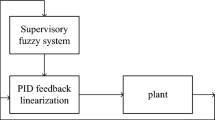
A fuzzy robust path tracking strategy of an active pelagic trawl system with ship and winch regulation is proposed. First, nonlinear mathematic model of the pelagic trawl system was derived using Lagrange equation and further simplified as a low order model for the convenience of controller design. Then, an active path tracking strategy of pelagic trawl system was investigated to improve the catching efficiency of the target fish near the sea bottom. By means of the active tracking control, the pelagic trawl net can be positioned dynamically to follow a specified trajectory via the coordinated winch and ship regulation. In addition, considering the system nonlinearities, modeling uncertainties and the unknown exogenous disturbance of the trawl system model, a nonlinear robust H 2/H ∞ controller based on Takagi-Sugeno (T-S) fuzzy model was presented, and the simulation comparison with linear robust H 2/H ∞ controller and PID method was conducted for the validation of the nonlinear fuzzy robust controller. The nonlinear simulation results show that the average tracking error is 0.4 m for the fuzzy robust H 2/H ∞ control and 125.8 m for the vertical and horizontal displacement, respectively, which is much smaller than linear H 2/H ∞ controller and the PID controller. The investigation results illustrate that the fuzzy robust controller is effective for the active path tracking control of the pelagic trawl system.
Similar content being viewed by others
References
GOUDEY C A. The development of a semi-pelagic trawl for squid and butterfish [C]// Proceedings of Oceans 1987. New York, USA, 1987: 645–648.
LEE C W. Dynamic analysis and control technology in a fishing gear system [J]. Fisheries Science, 2002, 68: 1835–1840.
UMEDA N. Optimal control of a Midwater trawl system [C]// Proceedings of the Fourth Pacific Congress on Marine Science and Technology. Tokyo, 1990: 507–514.
LEE C W. Depth control of a midwater trawl gear using fuzzy-logic [J]. Fisheries Research, 1995, 24 (4): 311–320.
LEE C W, LEE J H, KIM I J. Application of a fuzzy controller to depth control of a mid-water trawl net [J]. Fisheries Science, 2000, 66(5): 858–862.
REITE K J. Modeling and control of trawl systems [D]. Norway: Norwegian University of Science and Technology, 2006: 153–192.
CHAUVIER L, DAMY G, GILBERT J C, PICHON N. Optimal control of a deep-towed vehicle by optimization techniques [C]// Proceedings of Oceans 1998. New York, USA, 1998: 1634–1639.
WILLIAMS P. Towing and winch control strategy for underwater vehicles in sheared currents [J]. International Journal of Offshore and Polar Engineering, 2006, 16(3): 218–227.
TSENG C S, CHEN B S, UANG H J. Fuzzy tracking control design for nonlinear dynamic systems via T-S fuzzy model [J]. IEEE Transactions on Fuzzy Systems, 2001, 9(3): 381–392.
TONG S C, WANG T, LI H X. Fuzzy robust tracking control for uncertain nonlinear systems [J]. International Journal of Approximate Reasoning, 2002, 30(2): 73–90.
LIN C, WANG Q G, LEE T H. Hinf output tracking control for nonlinear systems via T-S fuzzy model approach. Systems [J]. IEEE Transactions on Systems, Man, and Cybernetics, Part B: Cybernetics, 2006, 36(2): 450–457.
WU J, NGUANG S K, SHEN J, LIU G, LI Y G. Robust H∞ tracking control of boiler-turbine systems [J]. ISA Transactions, 2010, 49(3): 369–375.
CHEN B S, TSENG C S, UANG H J. Mixed H2/H∞ fuzzy output feedback control design for nonlinear dynamic systems: an LMI approach [J]. IEEE Transactions on Fuzzy Systems, 2000, 8(3): 249–265.
JIANG Hai-bo, CHEN Tian-ping, CHEN Jing. Mixed H 2/H ∞ fuzzy output feedback tracking control for nonlinear dynamic systems [J]. Fuzzy Systems and Mathematics, 2006, 20(3): 116–123. (in Chinese)
BESSONNEAU J S, MARICHAL D. Study of the dynamics of submerged supple nets (applications to trawls) [J]. Ocean Engineering, 1998, 24(7): 563–583.
LEE C W, LEE J H, CHA B J, KIM H Y, LEE J H. Physical modeling for underwater flexible systems dynamic simulation [J]. Ocean Engineering, 2005, 32(3/4): 331–347.
SUN Xiao-feng, YIN Yong, JIN Yi-cheng, ZHANG Xin-yu, ZHANG Xiu-feng. The modeling of single-boat, mid-water trawl systems for fishing simulation [J]. Fisheries Research, 2011, 109(1): 7–15.
HU F X, KO M, TOKAI T, KANEHIRO H. Dynamic analysis of mid-water trawl system by a 2-dimensional lumped mass method [J]. Fisheries Science, 1995, 61(2): 229–233.
LEE C W, LEE J H. Modeling of a midwater trawl system with respect to the vertical movements [J]. Fisheries Science, 2000, 66(5): 851–857.
LEE C W, ZHANG C L, SHIN H O. Simplified trawl system modeling and design of a depth control system using fuzzy logic [J]. Fisheries Research, 2001, 53(1): 83–94.
Author information
Authors and Affiliations
Corresponding author
Additional information
Foundation item: Project(2009AA045004) supported by the Hi-tech Research and Development Program of China
Rights and permissions
About this article
Cite this article
Chen, Yl., Zhou, H., Zhao, Yg. et al. Fuzzy robust path tracking strategy of an active pelagic trawl system with coordinated ship and winch regulation. J. Cent. South Univ. 21, 167–179 (2014). https://doi.org/10.1007/s11771-014-1928-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11771-014-1928-1