
Abstract
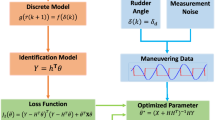
In this paper, the online parameter identification problem of the mathematical model of an unmanned surface vehicle (USV) considering the characteristics of the actuator is studied. A data-driven mathematical model of motion is very meaningful to realize trajectory prediction and adaptive motion control of the USV. An interactive identification algorithm (ESO–MILS, extended state observer–multi-innovation least squares) based on ESO is proposed. The robustness of online identification is improved by expanding the state observer to estimate the current disturbance without making artificial assumptions. Specifically, the three-degree-of-freedom dynamic equation of the double propeller propulsion USV is constructed. A linear model for online identification is derived by parameterization. Based on the least square criterion function, it is proved that the interactive identification method with disturbance estimation can improve the identification accuracy from the perspective of mathematical expectation. The extended state observer is designed to estimate the unknown disturbance in the model. The online interactive update improves the disturbance immunity of the identification algorithm. Finally, the effectiveness of the interactive identification algorithm is verified by simulation experiment and real ship experiment.






























Similar content being viewed by others
References
Zhang, W., Liu, X., & Han, P. (2020). Progress and challenges of overwater unmanned systems. Acta Automatica Sinica, 46(5), 847–857.
Zhang, X., Wang, X., Meng, Y., & Yin, Y. (2021). Research progress and future development trend of ship motion modeling and simulation. Journal of Dalian Maritime University, 47, 1–8.
Nguyen, T. (2022). Identification modeling and steering controller design for unmanned surface vehicles. In: 2022 6th International Conference on Green Technology and Sustainable Development (GTSD) (pp. 8–12). IEEE.
Qin, Y., & Ma, Y. (2014). Parametric identification of ship’s maneuvering motion based on improved least square method. In: 2014 International Conference on Mechatronics, Electronic, Industrial and Control Engineering (MEIC-14) (pp. 773–778). Atlantis Press.
Sun, G., Xie, J., & Wang, J. (2018). Ship course identification model based on recursive least squares algorithm with dynamic forgetting factor. Journal of Computer Applications, 38(3), 900.
Zhao, Y., Wu, J., Zeng, C., & Huang, Y. (2022). Identification of hydrodynamic coefficients of a ship manoeuvring model based on prbs input. Ocean Engineering, 246, 110640.
Guan, W., Peng, H., Zhang, X., & Sun, H. (2022). Ship steering adaptive cgs control based on ekf identification method. Journal of Marine Science and Engineering, 10(2), 294.
Qin, C. (2021). Parameter identification for ship mathematical model based on unscented kalman filter. Ship Science and Technology, 43(01), 89–94.
Zheng, J., Yan, D., Yan, M., Li, Y., & Zhao, Y. (2022). An unscented kalman filter online identification approach for a nonlinear ship motion model using a self-navigation test. Machines, 10(5), 312.
Hu, Y., Song, L., Liu, Z., & Yao, J. (2021). Identification of ship hydrodynamic derivatives based on LS-SVM with wavelet threshold denoising. Journal of Marine Science and Engineering, 9(12), 1356.
Wang, Z., Zou, Z., & Soares, G. (2019). Identification of ship manoeuvring motion based on nu-support vector machine. Ocean Engineering, 183, 270–281.
Silva, K. M., & Maki, K. J. (2022). Data-driven system identification of 6-DOF ship motion in waves with neural networks. Applied Ocean Research, 125, 103222.
Wakita, K., Maki, A., Umeda, N., Miyauchi, Y., Shimoji, T., Rachman, D. M., & Akimoto, Y. (2022). On neural network identification for low-speed ship maneuvering model. Journal of Marine Science and Technology, 27(1), 772–785.
Ding, F., Xie, X., & Fang, C. (1996). Multi-innovation identification method for time-varying systems. Acta Automatica Sinica, 22, 85–91.
Xie, S., Chu, X., Liu, C., & Wu, Q. (2017). Parameter identification of ship maneuvering response model based on multi-innovation least squares algorithm. Navigation of China, 40(1), 73–78.
Zhang, X., & Zhu, H. (2021). New identification algorithm for ship model parameters based on sinusoidal function processing innovation. Chinese Journal of Ship Research, 16(5), 158–162.
Zhao, B., Zhang, X., & Liang, C. (2022). A novel parameter identification algorithm for 3-DOF ship maneuvering modelling using nonlinear multi-innovation. Journal of Marine Science and Engineering, 10(5), 581.
Zhang, G., Zhang, X., & Pang, H. (2015). Multi-innovation auto-constructed least squares identification for 4 DOF ship manoeuvring modelling with full-scale trial data. ISA Transactions, 58, 186–195.
Mei, B., Sun, L., & Shi, G. (2019). White-black-box hybrid model identification based on rm-rf for ship maneuvering. IEEE Access, 7, 57691–57705.
Mu, D., Wang, G., Fan, Y., & Zhao, Y. (2017). Modeling and identification of podded propulsion unmanned surface vehicle and its course control research. Mathematical Problems in Engineering, 2017, 3209451.
Hemati, N., & Leu, M. C. (1992). A complete model characterization of brushless dc motors. IEEE Transactions on Industry Applications, 28(1), 172–180.
Cao, H., Xu, R., Zhao, S., Li, M., Song, X., & Dai, H. (2022). Robust trajectory tracking for fully-input-bounded actuated unmanned surface vessel with stochastic disturbances: An approach by the homogeneous nonlinear extended state observer and dynamic surface control. Ocean Engineering, 243, 110113.
Fossen, T. I. (2011). Handbook of marine craft hydrodynamics and motion control (pp. 109–132). Hoboken: Wiley.
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was supported by the National Natural Science Foundation of China (No. 52271367).
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Xiong, Y., Wang, X. & Zhou, S. Online interactive identification method based on ESO disturbance estimation for motion model of double propeller propulsion unmanned surface vehicle. Control Theory Technol. (2024). https://doi.org/10.1007/s11768-024-00201-1
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11768-024-00201-1