
Abstract
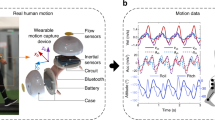
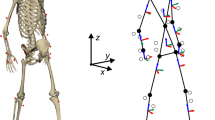
Human motion capture technologies are widely used in interactive game and learning, animation, film special effects, health care, and navigation. Because of the agility, upper limb motion estimation is the most difficult problem in human motion capture. Traditional methods always assume that the movements of upper arm and forearm are independent and then estimate their movements separately; therefore, the estimated motion are always with serious distortion. In this paper, we propose a novel ubiquitous upper limb motion estimation method using wearable microsensors, which concentrates on modeling the relationship of the movements between upper arm and forearm. Exploration of the skeleton structure as a link structure with 5 degrees of freedom is firstly proposed to model human upper limb motion. After that, parameters are defined according to Denavit-Hartenberg convention, forward kinematic equations of upper limb are derived, and an unscented Kalman filter is invoked to estimate the defined parameters. The experimental results have shown the feasibility and effectiveness of the proposed upper limb motion capture and analysis algorithm.
Similar content being viewed by others

References
A. Kapur, A. Kapur, N. Virji-Babul, et al. Gesture-based affective computing on motion capture data[C]//Proceedings of Affective Computing and Intelligent Interaction. Berlin: Springer-Verlag, 2005: 1–7.
L. Hamilton, R. Franklin, N. Jeffery. Development of a universal measure of quadrupedal forelimb-hindlimb coordination using digital motion capture and computerised analysis[J]. BMC Neuroscience, 2007, 8: 77.
D. Giansanti, V. Macellari, G. Maccioni, et al. Is it feasible to reconstruct body segment 3-D position and orientation using accelerometric data[J]. IEEE Transactions on Biomedical Engineering, 2003, 50(4): 476–483.
H. Dejnabadi, B. Jolles, K. Aminian. A new approach to accurate measurement of uniaxial joint angles based on a combination of accelerometers and gyroscopes[J]. IEEE Transactions on Biomedical Engineering, 2005, 52(8): 1478–1484.
H. J. Luinge, P. H. Veltink. Measuring orientation of human body segments using miniature gyroscopes and accelerometers[J]. Medical and Biological Engineering and Computing, 2005, 43(2): 273–282.
X. Yun, E. Bachmann. Design, implementation, and experimental results of a quaternion-based Kalman filter for human body motion tracking[J]. IEEE Transactions on Robotics and Automation, 2006, 22(6): 1216–1227.
B. Xsens Technologies. Moven-inertial motion capturing[R/OL]. http://www.xsens.com/.
E. Foxlin, M. Harrington. WearTrack: a self-referenced head and hand tracker for wearable computers and portable VR[C]//The Fourth International Symposium on Wearable Computers. Los Alamitos: IEEE Computer Society, 2000: 155–162.
Y. Tao, H. Hu. A novel sensing and data fusion system for 3-D arm motion tracking in telerehabilitation[J]. IEEE Transactions on Instrumentation and Measurement, 2008, 57(5): 1029–1040.
H. Luinge, P. Veltink, C. Baten. Ambulatory measurement of arm orientation[J]. Journal of Biomechanics, 2007, 40(1): 78–85.
Z. Zhang, Z. Huang, J. Wu. Hierarchical information fusion for human upper limb motion capture[C]//Proceedings of the 12th International Conference on Information Fusion. New York: IEEE, 2009: 1704–1711.
R. Hyde, L. Ketteringham, S. Neild, et al. Estimation of upper-limb orientation based on accelerometer and gyroscope measurements[J]. IEEE Transactions on Biomedical Engineering, 2008, 55(2): 746–754.
M. Mihelj. Inverse kinematics of human arm based on multisensor data integration[J]. Journal of Intelligent and Robotic Systems, 2006, 47(2): 139–153.
D. Vlasic, R. Adelsberger, G. Vannucci, et al. Practical motion capture in everyday surroundings[J]. ACM Transactions on Graphics (TOG), 2007, 26(3): 35.
W. Maurel. 3D Modeling of the Human Upper Limb Including the Biomechanics of Joints, Muscles and Soft Tissues[D]. Ecole Polytechnique Federale De Lausanne, 1999.
J. Craig. Introduction to Robotics: Mechanics and Control, 3/E[M]. Boston: Prentice-Hall, 2005.
B. Ristic, S. Arulampalam. Beyond the Kalman Filter: Particle Filters for Tracking Applications[M]. Boston: Artech House, 2004.
Y. Bar-Shalom, X. Li, T. Kirubarajan. Estimation with Applications to Tracking and Navigation[M]. New York: John Wiley & Sons, 2001.
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was done for the China-Singapore Institute of Digital Media (CSIDM) Project (No. CSIDM-200802), partly funded by the National Research Foundation administered by the Media Development Authority of Singapore, and supported by the National Natural Science Foundation of China (No. 60932001).
Zhiqiang ZHANG received his B.E. degree in Computer Science and Technology from School of Electrical Information and Engineering, Tianjian University, China, in 2005, and Ph.D. degree from the Sensor Network and Application Research Center, Graduate University, Chinese Academy of Sciences, in 2010. He is currently a research associate in Department of Computing, Imperial College London. His research interests include body sensor network, information fusion and targets tracking with about 20 publications in these areas in top journals and conferences.
Wai Choong WONG is a professor in the Department of Electrical and Computer Engineering, National University of Singapore (NUS). He is currently holding the position of Deputy Director (Strategic Development) at the Interactive and Digital Media Institute (IDMI) in NUS. He was previously Executive Director of the Institute for Infocomm Research (I2R) from Nov 2002 to Nov 2006. Since joining NUS in 1983, he served in various positions at the department, faculty, and university levels, including Head of the Department of Electrical and Computer Engineering from Jan 2008 to Oct 2009, Director of the NUS Computer Centre from Jul 2000 to Nov 2002, and Director of the Centre for Instructional Technology from Jan 1998 to Jun 2000. Prior to joining NUS in 1983, he was a member of Technical Staff at ATT Bell Laboratories, Crawford Hill Lab, NJ, U.S.A., from 1980 to 1983.
He received his B.S. (1st class Honors) and Ph.D. degrees in Electronic and Electrical Engineering from Loughborough University, U.K., in 1976 and 1980, respectively. His research interests include wireless networks and systems, multimedia networks, and source matched transmission techniques with over 200 publications and 4 patents in these areas.
He is coauthor of the book on “Source-Matched Mobile Communications”. He received the IEEE Marconi Premium Award in 1989, NUS Teaching Award (1989), IEEE Millennium Award in 2000, the e-nnovator Awards 2000, Open Category, and Best Paper Award at the IEEE International Conference on Multimedia and Expo (ICME) 2006.
Jiankang WU received his B.S. from University of Science and Technology of China, and Ph.D. from Tokyo University. He is currently a professor at the Graduate University, Chinese Academy of Sciences. He is directing the Sensor Networks and Applications Research Center (SNARC), which is jointly operated by the Graduate University and Institute of Automation, Chinese Academy of Sciences. Prior to his current position, he was Principal Scientist and Department Manager of New Initiatives Department at the Institute for Infocomm Research (I2R), Singapore (known as Kent Ridge Digital Labs (KRDL) in 1998–2001 and Institute of System Science (ISS) before 1998). He created new research initiatives in the areas of NeuroInformatics and PhysioInformatics, embedded sensor network systems in I2R, and led a series of large international collaborative projects in KRDL and ISS.
He was a full-time professor in University of Science and Technology of China (USTC) until 1993, where he received 9 distinguished awards from the nation and Chinese Academy of Sciences. He has also worked in universities in U.S., U.K., Germany, France, and Japan.
Dr. Wu pioneered several researches in the area of visual information processing, including adaptive image coding in later 70s, object-oriented GIS in early 80s, face recognition technology in 1992, content-based multimedia indexing and retrieval in 90s, and rights management for multimedia contents in later 90s. He initiated and led 3 large international collaborative labs. He was regarded as “an exceptionally bright visionary” by U.S. Giga Information Group. He is an author of 18 patents, more than 100 papers and 5 books.
Rights and permissions
About this article
Cite this article
Zhang, Z., Wong, W.C. & Wu, J. Wearable sensors for 3D upper limb motion modeling and ubiquitous estimation. J. Control Theory Appl. 9, 10–17 (2011). https://doi.org/10.1007/s11768-011-0234-9
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11768-011-0234-9