
Abstract
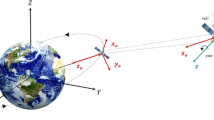
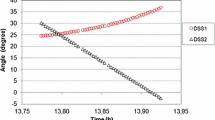
An algorithm based on the marginalized particle filters (MPF) is given in details in this paper to solve the spacecraft attitude estimation problem: attitude and gyro bias estimation using the biased gyro and vector observations. In this algorithm, by marginalizing out the state appearing linearly in the spacecraft model, the Kalman filter is associated with each particle in order to reduce the size of the state space and computational burden. The distribution of attitude vector is approximated by a set of particles and estimated using particle filter, while the estimation of gyro bias is obtained for each one of the attitude particles by applying the Kalman filter. The efficiency of this modified MPF estimator is verified through numerical simulation of a fully actuated rigid body. For comparison, unscented Kalman filter (UKF) is also used to gauge the performance of MPF. The results presented in this paper clearly demonstrate that the MPF is superior to UKF in coping with the nonlinear model.
Similar content being viewed by others

References
P. K. Pal. Three-axis attitude determination via Kalman filtering of magnetometer data[J]. Journal of Guidance, 1990, 13(3): 506–514.
E. J. Lefferts, F. L. Markley, M. D. Shuster. Kalman filtering for spacecraft attitude estimation[J]. Journal of Guidance, 1982, 5(5): 417–429.
S. J. Julier, J. K. Uhlmann, H. F. Durrant-Whyte. A New approach for the nonlinear transformation of means and covariances in filters and estimators[J]. IEEE Transactions on Automatic Control, 2000, 45(3): 477–482.
E. A. Wan, R. van der Merwe. Kalman Filtering and Neural Networks[M]. Hamilton: John Willey & Sons Inc., 2001.
J. L. Crassidis, F. L. Markley. Unscented filtering for spacecraft attitude estimation[J]. Journal of Guidance, and Dynamics, 2003, 26(4): 536–542.
M. S. Arulampalam, S. Maskell, N. Gordon. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking[J]. IEEE Transactions on Signal Processing, 2002, 50(2): 174–185.
A. Doucet, N. de Freitas, N. Gordon. Sequential Monte Carlo Methods in Practice, Statistics for Engineering and Information Science[M]. New York: Springer, 2001.
T. Schon, F. Gustafsson, P. J. Nordlund. Marginalized particle filters for mixed linear/nonlinear state-space Models[J]. IEEE Transactions on Signal Processing, 2005, 53(7): 2279–2289.
H. Schaub, J. L. Junkins. Stereographic orientation parameters for attitude dynamics: a generalization of the Rodrigues parameters[J]. Journal of the Astronautical Sciences, 1996, 44(1): 1–20.
J. L. Crassidis. Sigma-point Kalman filtering for integrated GPS and inertial navigation[C]//IEEE Transactions on Aerospace and Electronic Systems. New York: IEEE Press, 2005: 750–756.
G. Kitagawa. Monte Carlo filter and smoother for non-Gaussian nonlinear state space models[J]. Journal of Computational and Graphical Statistics, 1996, 5(1): 1–25.
Y. Oshman, A. Carmi. Attitude estimation from vector observations using genetic-algorithm-embedded quaternion particle filter[C]//Journal of Guidance, Control, and Dynamics, 2006, 29(4): 879–891.
Author information
Authors and Affiliations
Additional information
This work was supported by the Research Fund for the Doctoral Program of Higher Education of China (No. 20050213010), the National High Technology Research and Development Program of China (863 Program) (No. 2004AA735080).
Yaqiu LIU joined the school of information, Northeast Forestry University, Harbin, China, since 2004, where he is currently associate professor. He received the degree of the B.Eng. (Electrical Engineering) from Harbin Institute of Electrical Technolog the M.Eng. (Control theory and engineering) from Northeast Forestry University and Ph.D. (Navigation, Guidance and control) from Harbin Institute of Technology in 1990, 1999 and 2004, respectively. His research interests include process control, intelligent control and soft computing, fault diagnoses.
Xueyuan JIANG as a corresponding author of the paper, received the degree of the B.Eng. (Automatic control), the M.Eng. (Control Theory and Engineering) and Ph.D. (Navigation, Guidance and Control) from Harbin Institute of Technology in 2000, 2002 and 2006, respectively. His main research interests are in spacecraft attitude control, attitude estimation, and nonlinear filter.
Guangfu MA has been a full professor in the school astronautics, Harbin Institute of Technology, Harbin, China, since 1997. He received the degree of the B.Eng. (Automatic Control), the M.Eng. (Control Theory and Application) and Ph.D. (Navigation, Guidance and Control) from Harbin Institute of Technology in 1983, 1987 and 1993, respectively. From 2001 to 2002 he was a visiting scholar at Nagoya University, Japan. His main research interests are in spacecraft attitude control, simulation and modelling, robust control and application, fault diagnoses.
Rights and permissions
About this article
Cite this article
Liu, Y., Jiang, X. & Ma, G. Marginalized particle filter for spacecraft attitude estimation from vector measurements. J. Control Theory Appl. 5, 60–66 (2007). https://doi.org/10.1007/s11768-005-5294-2
Received:
Revised:
Issue Date:
DOI: https://doi.org/10.1007/s11768-005-5294-2