
Abstract
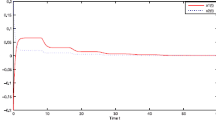
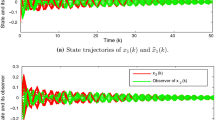
A dissipative-based adaptive neural control scheme was developed for a class of nonlinear uncertain systems with unknown nonlinearities that might not be linearly parameterized. The major advantage of the present work was to relax the requirement of matching condition, i.e., the unknown nonlinearities appear on the same equation as the control input in a state-space representation, which was required in most of the available neural network controllers. By synthesizing a state-feedback neural controller to make the closed-loop system dissipative with respect to a quadratic supply rate, the developed control scheme guarantees that the L2-gain of controlled system was less than or equal to a prescribed level. And then, it is shown that the output tracking error is uniformly ultimate bounded. The design scheme is illustrated using a numerical simulation.
Similar content being viewed by others

References
K. Funahashi, On the approximate realization of continuous mapping? by neural networks, Neural Networks, Vol.2, No. 1,pp. 183–192,1989.
Y. Niu, X. Wang, C. Hu, Adaptive output feedback control of nonlinear systems using dynamic neural networks, Proc of the 4 th World Congress on Intelligent Control and Automation, the Press of East China University of Science an Technology, Shanghai, pp. 1–5,2002.
R. M. Sanner, J. E. Slotine, Gaussian networks for direct adaptive control, IEEE Trans. on Neural Networks, Vol. 3, No. 5, pp. 837–863, 1992.
A. Yesdirek, F. L. Lewis Feedback linearization using neural networks, Automatica, Vol.31,No. 10,pp. 1659–1664,1995.
M. M. Polycarpou, Stable adaptive neural control scheme for nonlinear systems, IEEE Trans. on Automatic Control, Vol. 41, No. 3, pp. 447–451,1996.
M. M. Polycarpou, M. J. Mears, Stable adaptive tracking of uncertain systems using nonlinearly parametrized on-line approximators, Int. J. Control, Vol.70, No. 2, pp. 363–384,1998.
T. Knohl, H. Unbehauen, ANNNAC-extension of adaptive backstepping algorithm with artificial neural networks, 1EE Proc-D, Vol. 147, No.2, pp. 177–183,2000.
T. Zhang, S. Ge, C. Hang, Adaptive neural network control for strict-feedback nonlinear systems using backstepping design, Automatica, Vol. 36, No. 11,pp. 1835–1846,2000.
A.J. Van der Schaft, L 2 -gain and Passivity Techniques in Nonlinear-Control, Springer, New York,2000.
Author information
Authors and Affiliations
Rights and permissions
About this article
Cite this article
Niu, Y., Wang, X. & Lu, J. Dissipative-based adaptive neural control for nonlinear systems. J. Control Theory Appl. 2, 126–130 (2004). https://doi.org/10.1007/s11768-004-0056-0
Received:
Revised:
Issue Date:
DOI: https://doi.org/10.1007/s11768-004-0056-0