
Abstract
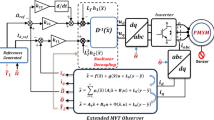
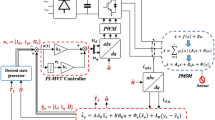
The problem of state feedback controllers for a class of Takagi-Sugeno (T-S) Lipschitz nonlinear systems is investigated. A simple systematic and useful synthesis method is proposed based on the use of the differential mean value theorem (DMVT) and convex theory. The proposed design approach is based on the mean value theorem (MVT) to express the nonlinear error dynamics as a convex combination of known matrices with time varying coefficients as linear parameter varying (LPV) systems. Using the Lyapunov theory, stability conditions are obtained and expressed in terms of linear matrix inequalities (LMIs). The controller gains are then obtained by solving linear matrix inequalities. The effectiveness of the proposed approach for closed loop-field oriented control (CL-FOC) of permanent magnet synchronous machine (PMSM) drives is demonstrated through an illustrative simulation for the proof of these approaches. Furthermore, an extension for controller design with parameter uncertainties and perturbation performance is discussed.
Similar content being viewed by others

References
Ichalal D, Arioui H, Mammar S. Observer design for two-wheeled vehicle: a Takagi-Sugeno approach with unmeasurable premise variables. In: Proceedings of the 19th Mediterranean Conference on Control and Automation. Corfu, Greece, 2011, 1–6
Pertew A M, Marquez H J, Zhao Q. H1 observer design for Lipschitz nonlinear systems. IEEE Transactions on Automatic Control, 2006, 51(7): 1211–1216
Luenberger D G. An introduction to observers. IEEE Transactions on Automatic Control, 1971, 16(6): 596–602
Rajamani R. Observers for Lipschitz nonlinear systems. IEEE Transactions on Automatic Control, 1998, 43(3): 397–401
Bara G I, Daafouz J, Kratz F, Ragot J. Parameter dependent state observer design for affine LPV systems. International Journal of Control, 2001, 74(16): 1601–1611
Zemouche A, Boutayeb M, Bara G I. Observer design for nonlinear systems: an approach based on the differential mean value theorem. In: Proceedings of the 44th IEEE Conference on Decision and Control. Seville, Spain, 2005, 6353–6358
Phanomchoeng G, Rajamani R, Piyabongkarn D. Nonlinear observer for bounded Jacobian systems, with applications to automotive slip angle estimation. IEEE Transactions on Automatic Control, 2011, 56(5): 1163–1170
Tanaka K, Wang H O. Fuzzy Control Systems Design and Analysis: A Linear Matrix Inequality Approach. New York: Wiley-Interscience, 2001
Baranyi P. TP model transformation as a way to LMI-based controller design. IEEE Transactions on Industrial Electronics, 2004, 51(2): 387–400
Merzoug M, Naceri F. Comparison of field-oriented control and direct torque control for permanent magnet synchronous motor (PMSM). International Journal of Electrical, Computer, Energetic, Electronics and Communication Engineering, 2008, 2(9): 107–112
Molavi R, Khaburi D A. Optimal control strategies for speed control of permanent-magnet synchronous motor drives. Proceedings of World Academy of Science Engineering and Technology, 2008, 44: 428
Štulrajter M, Hrabovcov¨¢ V, Franko M. Permanent magnets synchronous motor control theory. Journal of Electrical Engineering, 2007, 58(2): 79–84
Novotny D, Lipo T. Vector Control and Dynamics of AC Drives. New York: Oxford University Press, 1996
Solsona J, Valla M I, Muravchik C. Nonlinear control of a permanent magnet synchronous motor with disturbance torque estimation. IEEE Transactions on Energy Conversion, 2000, 15(2): 163–168
Shi J L, Liu T H, Chang Y C. Optimal controller design of a sensorless PMSM control system. Industrial Electronics Society, 2005. IECON 2005. 31st Annual Conference of IEEE, 2005.
Zemouche A, Boutayeb M, Bara G I. Observers for a class of Lipschitz systems with extension to H1 performance analysis. Systems & Control Letters, 2008, 57(1): 18–27
Sahoo P K, Riedel T. Mean Value Theorems and Functional Equations. New Jersey:World Scientific Publishing Company, 1999
Bergsten P, Palm R, Driankov D. Observers for Takagi-Sugeno fuzzy systems. IEEE Transactions on Systems, Man, and Cybernetics. Part B, Cybernetics, 2002, 32(1): 114–121
Raghavan S, Hedrick J K. Observer design for a class of nonlinear systems. International Journal of Control, 1994, 59(2): 515–528
Rahman M A, Vilathgamuwa D M, Uddin M N, Tseng K J. Nonlinear control of interior permanent-magnet synchronous motor. IEEE Transactions on Industry Applications, 2003, 39(2): 408–416
Ren H, Liu D. Nonlinear feedback control of chaos in permanent magnet synchronous motor. IEEE Transactions on Circuits and Systems II: Express Briefs, 2006, 53(1): 45–50
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Allag, A., Benakcha, A., Allag, M. et al. Classical state feedback controller for nonlinear systems using mean value theorem: closed loop-FOC of PMSM motor application. Front. Energy 9, 413–425 (2015). https://doi.org/10.1007/s11708-015-0379-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11708-015-0379-1