
Abstract
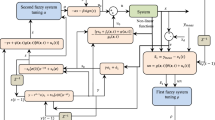
The aim of this paper is to develop a neuro-fuzzy-sliding mode controller (NFSMC) with a nonlinear sliding surface for a coupled tank system. The main purpose is to eliminate the chattering phenomenon and to overcome the problem of the equivalent control computation. A first-order nonlinear sliding surface is presented, on which the developed sliding mode controller (SMC) is based. Mathematical proof for the stability and convergence of the system is presented. In order to reduce the chattering in SMC, a fixed boundary layer around the switch surface is used. Within the boundary layer, where the fuzzy logic control is applied, the chattering phenomenon, which is inherent in a sliding mode control, is avoided by smoothing the switch signal. Outside the boundary, the sliding mode control is applied to drive the system states into the boundary layer. Moreover, to compute the equivalent controller, a feed-forward neural network (NN) is used. The weights of the net are updated such that the corrective control term of the NFSMC goes to zero. Then, this NN also alleviates the chattering phenomenon because a big gain in the corrective control term produces a more serious chattering than a small gain. Experimental studies carried out on a coupled tank system indicate that the proposed approach is good for control applications.
Similar content being viewed by others

References
S. V. Emel’yanov. Variable Structure Control Systems, Nouka, Moscow, 1967.
F. Boudjema, J. L. Abatut. Sliding-Mode: A New Way to Control Series Resonant Converters. In Proceedings of IEEE Conference Industrial Electronics Society, IEEE Press, Pacific Grove, Florida, USA, vol. 2, pp. 938–943, 1990.
M. E. Aggoune, F. Boudjema, A. Bensenousi, A. Hellal, M. R. Elmesai, S. V. Vadari. Design of Variable Structure Voltage Regulator Using Pole Assignement Technique. IEEE Transactions on Automatic Control, vol. 39, no. 10, pp. 2106–2110, 1994.
D. Boukhetala, F. Boudjema, T. Madani, M. S. Boucherit, N. K. M’sirdi. A New Decentralized Variable Structure Control for Robot Manipulators. International Journal of Robotics and Automation, vol. 18, no. 1, pp. 28–40, 2003.
M. Ertugrul, O. Kaynak. Neuro-sliding Mode Control of Robotic Manipulators. Mechatonics, vol. 10, no. 1–2, pp. 239–263, 2000.
J. J. Slotine, S. S. Sastry. Tracking Control of Nonlinear Systems Using Sliding Surfaces with Application to Robot Manipulators. International Journal of Control, vol. 38, no. 2 pp. 465–492, 1983.
S. K. Spurgeon. Choice of Discontinuous Control Component for Robust Sliding Mode Performance. International Journal of Control, vol. 53, no. 1, pp. 163–179, 1991.
S. W. Kim, J. J. Lee. Design of a Fuzzy Controller with Fuzzy Sliding Surface. Fuzzy Sets and Systems, vol. 71, no. 3, pp. 359–367, 1995.
C. Elmas, O. Ustun. A Hybrid Controller for the Speed Control of a Permanent Magnet Synchronous Motor Drive. Control Engineering Practice, vol. 16, no. 3, pp. 260–270, 2008.
M. M. Abdelhameed. Enhancement of Sliding Mode Controller by Fuzzy Logic with Application to Robotic Manipulators. Mechatronics, vol. 15, no. 4, pp. 439–458, 2005.
L. A. Zadeh. Fuzzy Sets. Information and Control, vol. 8, no. 3, pp. 338–353, 1965.
S. Labiod, M. S. Boucherit, T. M. Guerra. Adaptative Fuzzy Control of a Class of MIMO Nonlinear Systems. Fuzzy Sets and Systems, vol. 151, no. 1, pp. 59–77, 2005.
S. Labiod, T. M. Guerra. Adaptative Fuzzy Control of a Class of SISO Nonaffine Nonlinear Systems. Fuzzy Sets and Systems, vol. 158, no. 10, pp. 1126–1137, 2007.
M. Ertugrul, O. Kaynak, A. Sabanovic, K. Ohnishi. A Generalized Approach for Lyapunov Design of Sliding Mode Controllers for Motion Control Applications. In Proceedings of the 4th IEEE International Workshop on Advanced Motion Control, IEEE Press, Mie University, Japan, pp. 407–412, 1996.
M. A. Hussain, P. Y. Ho. Adaptive Sliding Mode Control with Neural Network Based Hybrid Models. Journal of Process Control, vol. 14, no. 2, pp. 157–176, 2004.
C. H. Tsai, H. Y. Chung, F. M. Yu. Neuro-sliding Mode Control with Its Applications to Seesaw Systems. IEEE Transactions on Neural Networks, vol. 15, no. 1, pp. 124–134, 2004.
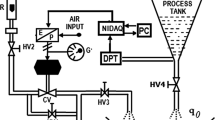
P. Wellstead. TecQuipment CE105 Coupled Tanks Apparatus, Control Systems Centre, Manchester, UK, 1993.
J. J. Slotine, W. Li. Applied Nonlinear Control, Prentice Hall, 1991.
D. S. Lee, M. G. Kim, H. K. Kim, M. J. Youn. Controller Design of Multivariable Variable Structure Systems with Nonlinear Switching Surfaces. IEE Proceedings: Control Theory and Applications, vol. 138, no. 5, pp. 493–499, 1991.
N. Yeganefar, M. Dambrine, A. Kokosy. Stabilisation pratique par modes glissants pour un système linéaire à retard. In Proceedings of Conférence Internationale Francophone D’Automatique, Tunisia, CD-ROM, 2004. (in French)
M. Ertugrul, O. Kaynak. Neural Computation of the Equivalent Control in Sliding Mode for Robot Trajectory Control Applications. In Proceedings of IEEE International Conference on Robotics and Automation, Belgium, vol. 3, pp. 2042–2047, 1998.
J. Z. Liu, W. J. Zhao, L. J. Zhang. Design of Sliding Mode Controller Based on Fuzzy Logic. In Proceedings of the 3rd IEEE Conference on Machine Learning and Cybernetics, IEEE Press, Shanghai, PRC, pp. 616–619, 2004.
Author information
Authors and Affiliations
Corresponding author
Additional information
Ahcene Boubakir received the B.Eng. degree in automatic control from University of Jijel, Jijel, Algeria, in 2004, M. Sc. degree in automatic control and robotics from Polytechnic School (EMP), Algiers, Algeria, in 2007. He is currently a Ph.D. candidate in automatic control at the National Polytechnic School.
His research interests include nonlinear control, sliding mode control, and fuzzy logic.
Fares Boudjema received the M. Eng. degree in electrical engineering from the Ecole Nationale Polytechnique, Algiers, Algeria, in 1985, the DEA degree, and the Ph.D. degree in automatic control from the Université Paul Sabatier, Toulouse, France, in 1987 and 1991, respectively. In 1991, he joined the Department of Electrical Engineering of the Ecole Nationale Polytechnique, Algiers, as an assistant professor. He was promoted to associate professor in 1994, and professor in 2000.
His research interests include application of sliding mode control, artificial neural network control, fuzzy control, and decentralized control in the field of the electrical machines, power systems, and robotics.
Salim Labiod received the B.Eng. M. Sc. and Ph.D. degrees in control engineering from National Polytechnic School of Algiers (ENP), Algeria, in 1995, 1998 and 2005, respectively. Since 1998, he has held teaching and research positions in the Faculty of Engineering at the University of Jijel, Algeria, where he is currently an associate professor.
His research interests include nonlinear control, adaptive control, and fuzzy control.
Rights and permissions
About this article
Cite this article
Boubakir, A., Boudjema, F. & Labiod, S. A neuro-fuzzy-sliding mode controller using nonlinear sliding surface applied to the coupled tanks system. Int. J. Autom. Comput. 6, 72–80 (2009). https://doi.org/10.1007/s11633-009-0072-0
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11633-009-0072-0