
Abstract
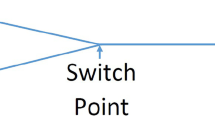
We consider the problem of moving a connected set of railcars, which we refer to as a train, from an origin layout to a destination layout in a railyard, accounting for the special structure of the railyard network and the length and orientation of the train. We propose a novel shortest path algorithm for determining a sequence of moves that minimizes the total distance (and associated time) required to move a train from its origin to destination. A railyard network consists of a set of track sections connected via switch points, which correspond to points at which three sections of track come together, such that one pair of the track segments forms an acute angle (and the other two pairs form obtuse angles). A train’s ability to traverse a switch node depends on the train’s length and whether or not its desired route involves traversing the acute angle or an obtuse angle at the switch. The shortest route problem for a train is further complicated by the fact that a train’s position on the network at any point in time may span multiple nodes in the network. We propose an easily explained solution approach that addresses the complications associated with switch points and the train’s length to determine a shortest route from origin to destination in \({\mathcal {O}}(e + n \log n)\) operations, where n and e correspond to the number of switch nodes and edges in the network respectively.













Similar content being viewed by others

Data availability
Data sharing is not applicable to this article as no datasets were generated or analysed during the current study.
References
Bodin, L., Golden, B., Schuster, A., Romig, W.: A model for the blocking of trains. Transp. Res. Part B 14(1–2), 115–120 (1980)
Cordeau, J., Toth, P., Vigo, D.: A survey of optimization models for train routing and scheduling. Transp. Sci. 32(4), 380–408 (1998)
Daganzo, C., Dowling, R., Hall, R.: Railroad classification yard throughput: the case of multistage triangular sorting. Transp. Res. Part A 17(2), 95–106 (1983)
Dijkstra, E.: A note on two problems in connexion with graphs. Numer. Math. 1(1), 269–271 (1959)
Enayaty Ahangar, N., Sullivan, K., Spanton, S., Wang, Y.: Algorithms and Complexity Results for the Single-Cut Routing Problem in a Rail Yard. Working Paper, University of Arkansas, Fayetteville, AR. https://industrial-engineering.uark.edu/_resources/scrp-20210603.pdf (2021)
Fredman, M.: New bounds on the complexity of the shortest path problem. SIAM J. Comput. 5(1), 83–89 (1976)
Fredman, M., Tarjan, R.: Fibonacci heaps and their uses in improved network optimization algorithms. J. ACM 34(3), 569–615 (1987)
Jha, K., Ahuja, R., Şahin, G.: New approaches for solving the block-to-train assignment problem. Networks 51(1), 48–62 (2008)
Lange, J., Werner, F.: Approaches to modelling train scheduling problems as job-shop problems with blocking constraints. J. Sched. 21(2), 191–207 (2018)
Petersen, E.: Railyard modeling: part I. Prediction of put-through time. Transp. Sci. 11(1), 37–49 (1977)
Riezebos, J., Wezel, W.: k-shortest routing of trains on shunting yards. OR Spectr. 31(4), 745–758 (2009)
Sama, M., Pellegrini, P., D’Ariano, A., Rodriguez, J., Pacciarelli, D.: Ant colony optimization for the real-time train routing selection problem. Transp. Res. Part B 85, 89–108 (2016)
Turnquist, M., Daskin, M.: Queuing models of classification and connection delay in railyards. Transp. Sci. 16(2), 207–230 (1982)
Zwaneveld, P., Kroon, L., Romeijn, H., Salomon, M.: Routing trains through railway stations: model formulation and algorithms. Transp. Sci. 30(3), 181–194 (1996)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Aliakbari, M., Geunes, J. & Sullivan, K.M. The single train shortest route problem in a railyard. Optim Lett 15, 2577–2595 (2021). https://doi.org/10.1007/s11590-021-01761-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11590-021-01761-w