
Abstract
Purpose
Flexible surgical robot can work in confined and complex environments, which makes it a good option for minimally invasive surgery. In order to utilize flexible manipulators in complicated and constrained surgical environments, it is of great significance to monitor the position and shape of the curvilinear manipulator in real time during the procedures. In this paper, we propose a magnetic tracking-based planar shape sensing and navigation system for flexible surgical robots in the transoral surgery. The system can provide the real-time tip position and shape information of the robot during the operation.
Methods
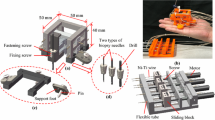
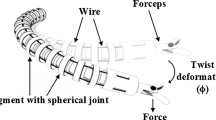
We use wire-driven flexible robot to serve as the manipulator. It has three degrees of freedom. A permanent magnet is mounted at the distal end of the robot. Its magnetic field can be sensed with a magnetic sensor array. Therefore, position and orientation of the tip can be estimated utilizing a tracking method. A shape sensing algorithm is then carried out to estimate the real-time shape based on the tip pose. With the tip pose and shape display in the 3D reconstructed CT model, navigation can be achieved.
Results
Using the proposed system, we carried out planar navigation experiments on a skull phantom to touch three different target positions under the navigation of the skull display interface. During the experiments, the real-time shape has been well monitored and distance errors between the robot tip and the targets in the skull have been recorded. The mean navigation error is \(2.07\pm 0.71\) mm, while the maximum error is 3.2 mm.
Conclusion
The proposed method provides the advantages that no sensors are needed to mount on the robot and no line-of-sight problem. Experimental results verified the feasibility of the proposed method.















Similar content being viewed by others

References
Li Z, Du R, Lei MC, Yuan SM (2011) Design and analysis of a biomimetic wire-driven robot arm. In: ASME 2011 international mechanical engineering congress and exposition, American society of mechanical engineers, pp 191–198
Palli G, Pirozzi S (2012) A miniaturized optical force sensor for tendondriven mechatronic systems: design and experimental evaluation. Mechatronics 22(8):1097–1111
Palli G, Melchiorri C (2014) Friction compensation techniques for tendon driven robotic hands. Mechatronics 24(2):108–117
Gouttefarde M, Daney D, Merlet JP (2011) Interval-analysis-based determination of the wrench-feasible workspace of parallel cable-driven robots. Robot IEEE Trans 27(1):1–13
Ren H, Lim CM, Wang J, Liu W, Song S, Li Z, Herbert G, Yu H, Tse Z, Tan Z (2013) Computer assisted transoral surgery with flexible robotics and navigation technologies: a review of recent progress and research challenges. Crit Rev Biomed Eng 41(4–5):365–391
Rucker DC, Webster RJ, Chirikjian GS, Cowan NJ (2010) Equilibrium conformations of concentric-tube continuum robots. Int J Robot Res 29(10):1263–1280
Webster RJ, Jones BA (2010) Design and kinematic modeling of constant curvature continuum robots: a review. Int J Robot Res 29(13):1661–1683
Rucker DC, Webster RJ (2011) Statics and dynamics of continuum robots with general tendon routing and external loading. Robot IEEE Trans 27(6):1033–1044
Xu K, Simaan N (2010) Analytic formulation for kinematics, statics, and shape restoration of multibackbone continuum robots via elliptic integrals. J Mech Robot 2(1):011,006
Trivedi D, Lot A, Rahn CD (2008) Geometrically exact models for soft robotic manipulators. Robot IEEE Trans 24(4):773–780
Roesthuis RJ, Abayazid M, Misra S (2012) Mechanics-based model for predicting in-plane needle detection with multiple bends. In: 4th IEEE RAS & EMBS international conference on Biomedical robotics and biomechatronics (BioRob) 2012, pp 69–74
Boctor EM, Choti MA, Burdette EC, Webster Iii RJ (2008) Three-dimensional ultrasound-guided robotic needle placement: an experimental evaluation. Int J Med Robot Comput Assist Surg 4(2):180–191
Park YL, Elayaperumal S, Daniel B, Ryu SC, Shin M, Savall J, Black RJ, Moslehi B, Cutkosky MR (2010) Real-time estimation of 3-d needle shape and detection for mri-guided interventions. Mechatron IEEE/ASME Trans 15(6):906–915
Camarillo DB, Loewke KE, Carlson CR, Salisbury JK (2008) Vision based 3-d shape sensing of flexible manipulators. In: IEEE/ICRA 2008 international conference on robotics and automation 2008, pp 2940–2947
Henken K, Van Gerwen D, Dankelman J, Van Den Dobbelsteen J (2012) Accuracy of needle position measurements using fiber bragg gratings. Minim Invasive Ther Allied Technol 21(6):408–414
Kim B, Ha J, Park FC, Dupont PE (2014) Optimizing curvature sensor placement for fast, accurate shape sensing of continuum robots. In: IEEE/ICRA 2014 international conference on robotics and automation, pp 5374–5379
Shapiro Y, Kosa G, Wolf A (2014) Shape tracking of planar hyper flexible beams via embedded pvdf detection sensors. IEEE/ASME Trans Mechatron 19(4):1260–1267
Song S, Li Z, Meng QH, Yu H, Ren H (2015) Real-time shape estimation for wire-driven flexible robots with multiple bending sections based on quadratic bezier curves. Sens J IEEE 15(11):6326–34
Bajo A, Simaan N (2012) Kinematics-based detection and localization of contacts along multisegment continuum robots. Robot IEEE Trans 28(2):291–302. doi:10.1109/TRO.2011.2175761
Franz AM, Haidegger T, Birkfellner W, Cleary K, Peters TM, Maier-Hein L (2014) Electromagnetic tracking in medicinea review of technology, validation, and applications. IEEE Trans Med Imaging 33(8):1702–1725
Song S, Li B, Qiao W, Hu C, Ren H, Yu H, Zhang Q, Meng M, Xu G (2014) 6-d magnetic localization and orientation method for an annular magnet based on a closed-form analytical model. Magn IEEE Trans 50(9):1–11. doi:10.1109/TMAG.2014.2315592
Son D, Yim S, Sitti M (2016) A 5-d localization method for a magnetically manipulated untethered robot using a 2-d array of hall-effect sensors. IEEE/ASME Trans Mechatron 21(2):708–716
Yim S, Sitti M (2013) 3-d localization method for a magnetically actuated soft capsule endoscope and its applications. IEEE Trans Robot 29(5):1139–1151
Wu L, Song S, Wu K, Lim CM, Ren H (2017) Development of a compact continuum tubular robotic system for nasopharyngeal biopsy. Med Biol Eng Comput 55:403–417
Acknowledgements
This work is supported in part by Natural Scientific Research Innovation Foundation in Harbin Institute of Technology (HIT.NSRIF.2017053), and in part by RGC GRF Grants CUHK415512 and CUHK415613, CRF Grant CUHK6/CRF/13G, ITC ITF Grant ITS/236/15, and CUHK VC discretional fund #4930765.
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Ethical approval
For this kind of study, no formal ethics approval is required by the institutional ethics committee.
Informed consent
Informed consent was obtained from all individual participants included in the study.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
About this article

Cite this article
Song, S., Zhang, C., Liu, L. et al. Preliminary study on magnetic tracking-based planar shape sensing and navigation for flexible surgical robots in transoral surgery: methods and phantom experiments. Int J CARS 13, 241–251 (2018). https://doi.org/10.1007/s11548-017-1672-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-017-1672-8