
Abstract
Purpose
To evaluate a low-cost, inertial sensor-based surgical navigation solution for periacetabular osteotomy (PAO) surgery without the line-of-sight impediment.
Methods
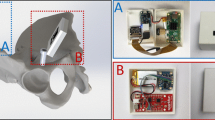
Two commercial inertial measurement units (IMU, Xsens Technologies, The Netherlands), are attached to a patient’s pelvis and to the acetabular fragment, respectively. Registration of the patient with a pre-operatively acquired computer model is done by recording the orientation of the patient’s anterior pelvic plane (APP) using one IMU. A custom-designed device is used to record the orientation of the APP in the reference coordinate system of the IMU. After registration, the two sensors are mounted to the patient’s pelvis and acetabular fragment, respectively. Once the initial position is recorded, the orientation is measured and displayed on a computer screen. A patient-specific computer model generated from a pre-operatively acquired computed tomography scan is used to visualize the updated orientation of the acetabular fragment.
Results
Experiments with plastic bones (eight hip joints) performed in an operating room comparing a previously developed optical navigation system with our inertial-based navigation system showed no statistically significant difference on the measurement of acetabular component reorientation. In all eight hip joints the mean absolute difference was below four degrees.
Conclusion
Using two commercially available inertial measurement units we show that it is possible to accurately measure the orientation (inclination and anteversion) of the acetabular fragment during PAO surgery and therefore to successfully eliminate the line-of-sight impediment that optical navigation systems have.









Similar content being viewed by others


References
Millis M, Kim Y (2002) Rationale of osteotomy and related procedures for hip preservation: a review. Clin Orthop Relat Res 405:108–121
Hsieh PH, Chang YH, Shih CH (2006) Image-guided periacetabular osteotomy: computer-assisted navigation compared with the conventional technique: a randomized study of 36 patients followed for 2 years. Acta Orthop 77(4):591–597. doi:10.1080/17453670610012656
Langlotz F, Stucki M, Baechler R, Scheer C, Ganz R, Berlemann U, Nolte L-P, Mueller M (1997) The first twelve cases of computer assisted periacetabular osteotomy. Comput Aided Surg 2:317–326
Khanduja V, Villar R (2006) Arthroscopic surgery of the hip—current concepts and recent advances. J Bone Joint Surg Br 88(B(12)):1557–1566. doi:10.1302/0301-620x.88b12
Langlotz F, Bachler R, Berlemann U, Nolte LP, Ganz R (1998) Computer assistance for pelvic osteotomies. Clin Orthop 354:92–102
Jäger M, Westhoff B, Wild A, Krauspe R (2004) Computer-assisted periacetabular triple osteotomy for treatment of dysplasia of the hip. Zeitschrift fur Orthopadie und Ihre Grenzgebiete 142(1):51–59
Liu L, Ecker T, Schumann S, Siebenrock KA, Nolte LP, Zheng G (2014) Computer assisted planning and navigation of periacetabular osteotomy with range of motion optimization. MICCAI 2:643–650
Jolles D, Genoud P, Hoffmeyer P (2004) Computer assisted cup placement techniques in total hip arthroplasty improve accuracy of placement. Clin Orthop 426(1):174–179
Nogler M, Kessler O, Prassl A (2004) Reduced variability of acetabular cup positioning with use of an imageless navigation system. Clin Orthop 426(1):159–163
Ryan JA, Jamali AA, Bargar WL (2010) Accuracy of computer navigation for acetabular component placement in THA. Clin Orthop Relat Res 468(1):169–177. doi:10.1007/s11999-009-1003-7
Haid M, Kamil M, Chobtrong T, Guenes E (2013) Machine-vision-based and inertial-sensor-supported navigation system for the minimal invasive surgery. AMA conferences 2013—SENSOR 2013. doi:10.5162/sensor2013/P5.3
von Jako R, Carrino J, Yonemura K, Noda G, Zhue W, Blaskiewicz D, Rajue M, Groszmann D, Weber G (2009) Electromagnetic navigation for percutaneous guide-wire insertion: accuracy and efficiency compared to conventional guidance. NeuroImage 47(2):127–132
Zhang H, Banovac F, Lin R, Glossop N, Wood B, Lindisch D, Levy E, Cleary K (2006) Electromagnetic tracking for abdominal interventions in computer aided surgery. Comput Aided Surg 11(1):127–136
Behrens A, Grimm J, Gross S, Aach T (2011) Inertial navigation system for bladder endoscopy. Engineering in Medicine and Biology Society, EMBC, p 2011
O’Donovan KJ, Kamnik R, O’Keeffe DT, Lyons GM (2007) An inertial and magnetic sensor based technique for joint angle measurement. J Biomech 40(8):2604–2611. doi:10.1016/j.jbiomech.2006.12.010
Rebello K (2004) Application of MEMS in surgery. Proc IEEE 92(1):43–55
Ren H, Kazanzides P (2012) Investigation of attitude tracking using an integrated inertial and magnetic navigation system for hand-held surgical instruments. IEEE/ASME Trans Mechatron 17(2):210–217
Kalman RE (1960) A new approach to linear filtering and prediction problems. ASME J Basic Eng 82(1):35–45. doi:10.1115/1.3662552
Beller S, Eulenstein S, Lange T, Hunerbein M, Schlag PM (2009) Upgrade of an optical navigation system with a permanent electromagnetic position control: a first step towards “navigated control” for liver surgery. J Hepato Biliary Pancreat Surg 16(2):165–170. doi:10.1007/s00534-008-0040-z
Claasen G, Martin P, Picard F (2011) High-bandwidth low-latency tracking using optical and inertial sensors. In: Proceedings of the 5th international conference on automation, robotics and applications, pp 366–371
Mahfouz M, Kuhn M, To G, Fathy A (2009) Integration of UWB and wireless pressure mapping in surgical navigation. IEEE Trans Microw Theory Tech 57(6):2550–2564
Ren H, Rank D, Merdes M, Stallkamp J, Kazanzides P (2012) Multisensor data fusion in an integrated tracking system for endoscopic surgery. IEEE Trans Inf Technol Biomed 16(1):106–111
Walti J, Jost G, Cattin P (2014) A new cost-effective approach to pedicular screw placement. MICCAI Lect Notes Comput Sci 8678:90–97
Roetenberg D, Luinge H, Veltlink P (2003) Inertial and magnetic sensing of human movement near ferromagnetic materials. In: Proceedings of the 2nd IEEE/ACM international symposium on mixed and augmented reality
Markely F, Cheng Y, Crassidis J, Oshman Y (2007) Averaging quaternions. J Guid Control Dyn 30(4):1193–1196
Murray D (1993) The definition and measurement of acetabular orientation. J Bone Joint Surg Br 75(B(2)):228–232
Richolt J, Effenberger H, Rittmeister M (2005) How does soft tissue distribution affect anteversion accuracy of the palpation procedure in image-free acetabular cup navigation? An ultrasonographic assessment. Comput Aided Surg 10(2):87–92
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Informed consent
Informed consent was obtained from all individual participants included in the study.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Supplementary material 1 (mp4 95141 KB)
Rights and permissions
About this article

Cite this article
Pflugi, S., Liu, L., Ecker, T.M. et al. A cost-effective surgical navigation solution for periacetabular osteotomy (PAO) surgery. Int J CARS 11, 271–280 (2016). https://doi.org/10.1007/s11548-015-1267-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-015-1267-1